“YOLO26-OBB+语音控制” 机械臂抓取方案(三、语音控制+简易版调度中心)
我们前两章节介绍了数据采集和数据训练及模型验证,就在昨天我才刚刚跑通最简易版本的语音控制机械臂抓取的流程,今天我把步骤分享一下。
相机服务端这里可以参考我先前的SAM3+点云的那套方案
https://blog.csdn.net/m0_56498637/article/details/159671697?spm=1001.2014.3001.5502
那么在这里我们只需要新增一个yolo识别的函数及接口即可
detect_yolo函数
def detect_yolo():
global latest_color_frame, latest_depth_frame
global processed_frame, intr, depth_scale
with frame_lock:
if latest_color_frame is None or latest_depth_frame is None:
return None
color = latest_color_frame.copy()
depth = latest_depth_frame.copy()
results = model(color, verbose=False)
best_target = None
best_score = 0
for r in results:
if r.obb is None:
continue
boxes = r.obb.xyxyxyxy.cpu().numpy()
cls_ids = r.obb.cls.cpu().numpy()
scores = r.obb.conf.cpu().numpy()
for box, cls_id, score in zip(boxes, cls_ids, scores):
if score < 0.4:
continue
pts = box.reshape((4, 2))
# =========================
# 像素中心
# =========================
cx = int(np.mean(pts[:, 0]))
cy = int(np.mean(pts[:, 1]))
# =========================
# 深度(米)
# =========================
depth_value = depth[cy, cx] * depth_scale
# =========================
# 相机坐标
# =========================
cam_point = pixel2point3d(cx, cy, depth_value, intr)
# =========================
# 转工具坐标系
# =========================
tool_point = cam_to_tool(cam_point, T_cam_to_tool)
# =========================
# 角度
# =========================
angle = get_grasp_angle(pts)
# =========================
# 打印调试信息
# =========================
print("\n========== YOLO DETECT ==========")
print(f"类别: {int(cls_id)} 置信度: {score:.3f}")
print(f"像素坐标: (u, v) = ({cx}, {cy})")
print(f"深度: {depth_value:.4f} m")
print("\n--- 相机坐标系 (Camera) ---")
print(f"X: {cam_point[0]:.4f} Y: {cam_point[1]:.4f} Z: {cam_point[2]:.4f}")
print("\n--- 工具坐标系 (Tool) ---")
print(f"X: {tool_point[0]:.4f} Y: {tool_point[1]:.4f} Z: {tool_point[2]:.4f}")
print(f"\n抓取角度: {angle:.2f}°")
print("================================\n")
# =========================
# 画图
# =========================
pts_int = pts.astype(int)
cv2.polylines(color, [pts_int], True, (0, 255, 0), 2)
label = f"{int(cls_id)} {score:.2f} {angle:+.1f}"
cv2.putText(color, label, (cx, cy),
cv2.FONT_HERSHEY_SIMPLEX,
0.5, (0, 255, 0), 1)
cv2.circle(color, (cx, cy), 4, (0, 0, 255), -1)
# =========================
# 选最优目标
# =========================
if score > best_score:
best_target = {
"cam_x": cam_point[0],
"cam_y": cam_point[1],
"cam_z": cam_point[2],
"tool_x": tool_point[0],
"tool_y": tool_point[1],
"tool_z": tool_point[2],
"angle": angle,
"cls": int(cls_id),
"conf": float(score)
}
best_score = score
# 更新画面
with frame_lock:
processed_frame = color
save_path = save_processed_image(color)
clean_old_images()
return best_target, save_path在这里我们针对机械臂的控制代码也进行一下改造,分为机械臂服务端及客户端
我们新增一个robot_task函数的flask接口,新增状态机判断
def robot_task():
global is_running,stop_flag
if is_running:
return jsonify({
"status": "busy",
"msg": "机械臂正在执行任务"
})
is_running = True
result = False
cmd = None
try:
cmd = request.args.get("cmd")
print(f"收到任务: {cmd}")
if cmd == "grasp":
result = execute_grasp()
elif cmd == "reset":
result = move_to_pose(PHOTO_POS)
elif cmd == "open":
result = open_gripper()
elif cmd == "close":
result = close_gripper()
elif cmd == "stop":
stop_flag = True
return jsonify({"status": "ok", "msg": "停止信号已发送"})
else:
return jsonify({
"status": "error",
"msg": "未知指令"
})
return jsonify({
"status": "ok",
"cmd": cmd,
"result": result
})
except Exception as e:
print(f"任务执行异常: {e}")
return jsonify({
"status": "error",
"msg": str(e)
})
finally:
is_running = False客户端这里就相对简单了
import requests
ROBOT_URL = "http://127.0.0.1:6000/robot_task"
def send_robot_cmd(cmd):
try:
resp = requests.get(ROBOT_URL, params={"cmd": cmd}, timeout=60)
print("机械臂响应:", resp.json())
except Exception as e:
print("机械臂请求失败:", e)那么做好这两个服务端的代码后,我们设计一个简易的调度中心
scheduler.py
import queue
import threading
from robot_client import send_robot_cmd
task_queue = queue.Queue()
def add_task(cmd):
print(f"加入任务: {cmd}")
task_queue.put(cmd)
def worker():
print("调度线程启动")
while True:
cmd = task_queue.get()
print(f"执行任务: {cmd}")
send_robot_cmd(cmd)
task_queue.task_done()
def start_scheduler():
t = threading.Thread(target=worker, daemon=True)
t.start()接下来我们就接入语音,这里我尝试了两个本地离线的语音识别模型,一个是Vosk,一个是FunASR,这里我推荐使用FunASR语音识别功能
首先是Vosk的方案
我们首先访问Vosk Model的官网:https://alphacephei.com/vosk/models
进入后,我们下拉选择中文版本模型进行下载
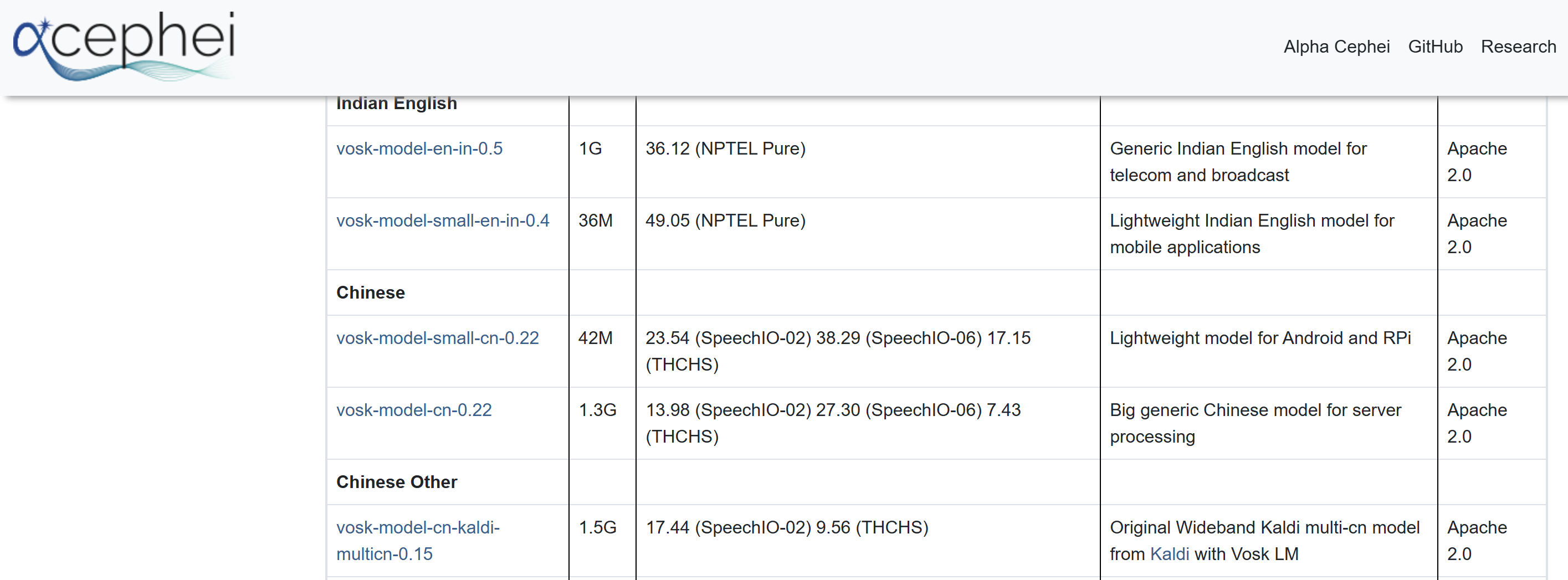
下载完成后,我们将解压后的文件夹直接放在我们的项目目录里,重命名为Voice_model_Vosk,接下来开始设计语音识别及关键词对应的Command
Voice_vosk.py
import queue
import sounddevice as sd
from vosk import Model, KaldiRecognizer
import json
from scheduler import add_task
q = queue.Queue()
def callback(indata, frames, time, status):
q.put(bytes(indata))
model = Model("Voice_model_Vosk")
rec = KaldiRecognizer(model, 16000)
def handle_voice(text):
print(f"识别到: {text}")
if "抓取" in text or "抓起来" in text:
add_task("grasp")
elif "复位" in text or "回去" in text:
add_task("reset")
elif "打开夹爪" in text:
add_task("open")
elif "关闭夹爪" in text:
add_task("close")
elif "停止" in text:
add_task("stop")
def voice_loop():
with sd.RawInputStream(
samplerate=16000,
blocksize=8000,
dtype='int16',
channels=1,
callback=callback
):
print("🎤 语音系统已启动...")
while True:
data = q.get()
if rec.AcceptWaveform(data):
result = json.loads(rec.Result())
text = result.get("text", "")
if text:
handle_voice(text)FunASR方案
Voice_FunASR.py
from funasr import AutoModel
import sounddevice as sd
import numpy as np
import time
import threading
from scheduler import add_task
from agent import agent_parse
model = AutoModel(model="paraformer-zh")
last_trigger_time = 0
COOLDOWN = 2
def record_audio(duration=3, fs=16000):
audio = sd.rec(int(duration * fs), samplerate=fs, channels=1, dtype='float32')
sd.wait()
return audio.flatten()
def handle_voice(text):
global last_trigger_time
text = text.replace(" ", "")
print(f"识别: {text}")
if not text:
return
# 防抖
now = time.time()
if now - last_trigger_time < COOLDOWN:
return
# ======================
# 优先规则
# ======================
if "再" in text or "继续" in text:
print("继续抓取")
add_task("grasp")
last_trigger_time = now
return
# ======================
# 走智能体
# ======================
task = agent_parse(text)
if not task:
return
cmd = task.get("cmd")
if cmd:
print(f"🚀 执行: {cmd}")
add_task(cmd)
last_trigger_time = now
def voice_worker():
print("语音线程启动")
while True:
audio = record_audio()
try:
res = model.generate(input=audio)
text = res[0]["text"]
handle_voice(text)
except Exception as e:
print("语音异常:", e)
def start_voice():
t = threading.Thread(target=voice_worker, daemon=True)
t.start()接下来我们就通过一个main.py来触发,前提要将两个服务端打开
main.py
from scheduler import start_scheduler
from Voice_Vosk import voice_loop
import time
if __name__ == "__main__":
print("系统启动")
start_scheduler()
voice_loop()
while True:
time.sleep(1)好的,这样我们整体的最简易的架构就完成了,我们将两个服务端启动后查看一下结果
那么我们选择FunASR的方式,因为Vosk识别的效果实在是不堪入目,那么我们可以看到语音识别的效果,这里也是成功触发了抓取任务

那么其实这种最终的效果并不是我们想要的,我们希望它能够更智能一点,所以我这里补充了一个最简易的agent智能体,尝试通过介入大模型来帮助我们更好实现效果
我们这里选择qwen大模型,我们登录qwen官网https://bailian.console.aliyun.com/cn-beijing/?spm=5176.29619931.J_SEsSjsNv72yRuRFS2VknO.2.7cf810d7MASOIt&tab=demohouse#/experience/llm
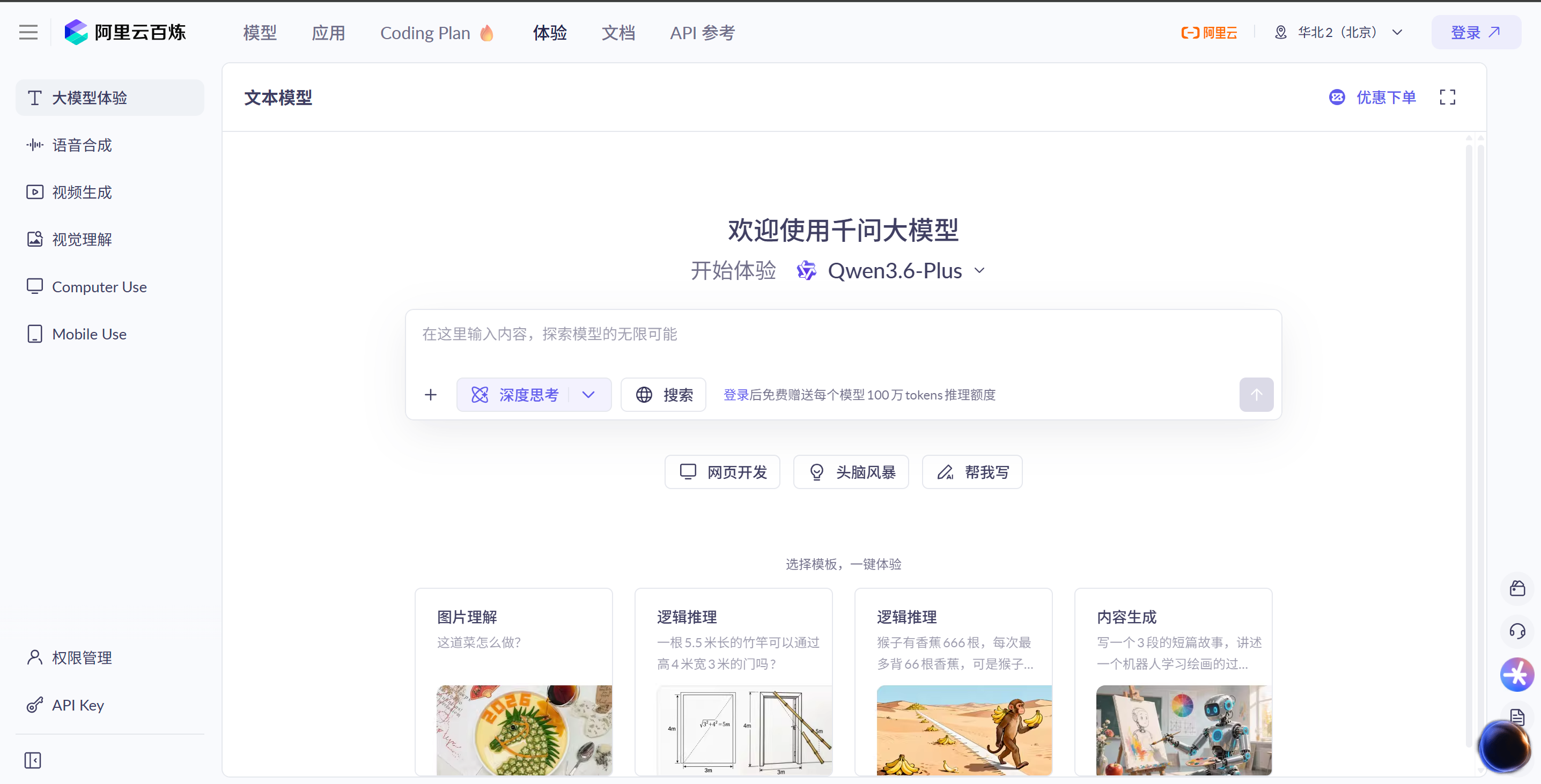
我们选择API Key,生成我们自己的密钥

然后我们设计一下Agent代码
Agent.py
import dashscope
dashscope.api_key = "xxx你自己的API Key"
import json
from dashscope import Generation
# 记忆
memory = []
last_task = None
def agent_parse(text):
global last_task
prompt = f"""
你是一个机械臂控制助手。
用户说:{text}
请解析成JSON:
{{
"cmd": "grasp/reset/open/close/stop/none"
}}
规则:
1. “抓取”“抓起来”“再来一个”“继续” → grasp
2. 无法理解 → none
3. 只返回JSON
"""
response = Generation.call(
model="qwen-turbo",
prompt=prompt
)
print("原始返回:", response)
result = response.output.text.strip()
print("LLM:", result)
try:
data = json.loads(result)
except:
return None
cmd = data.get("cmd")
# fallback记忆
if cmd == "none" or cmd is None:
print("使用上一次任务")
return last_task
# 更新记忆
last_task = data
memory.append(data)
return data总结
当然了,这种效果的提升其实也是微乎其微的,所以权当是一次新鲜的尝试,我也在尝试用一些更为智能的方式,比如近期热度很高的“养龙虾”,确实这种智能体才是我们需要的,才能够让整个的控制变得更有交互感,一旦有了初步成果,我会第一时间给大家进行分享,有兴趣的同学点赞关注一下!

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 5
5 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)