基于深度学习的航空遥感点云分类:解锁三维城市模型构建新可能
不仅能让三维城市模型的构建更加高效,减少对额外数据的依赖,还能提升重建的精度和质量,为后续在各个领域的应用打下坚实基础。这里要给大家介绍一项超有趣的正在进行的研究,它致力于基于分类的航空点云进行三维建筑重建,而且厉害的是,整个过程无需辅助数据,像建筑轮廓这类都不需要。介绍了一项关于基于分类的航空点云的三维建筑重建的正在进行的研究,无需提供辅助数据(例如建筑轮廓等)。介绍了一项关于基于分类的航空点云
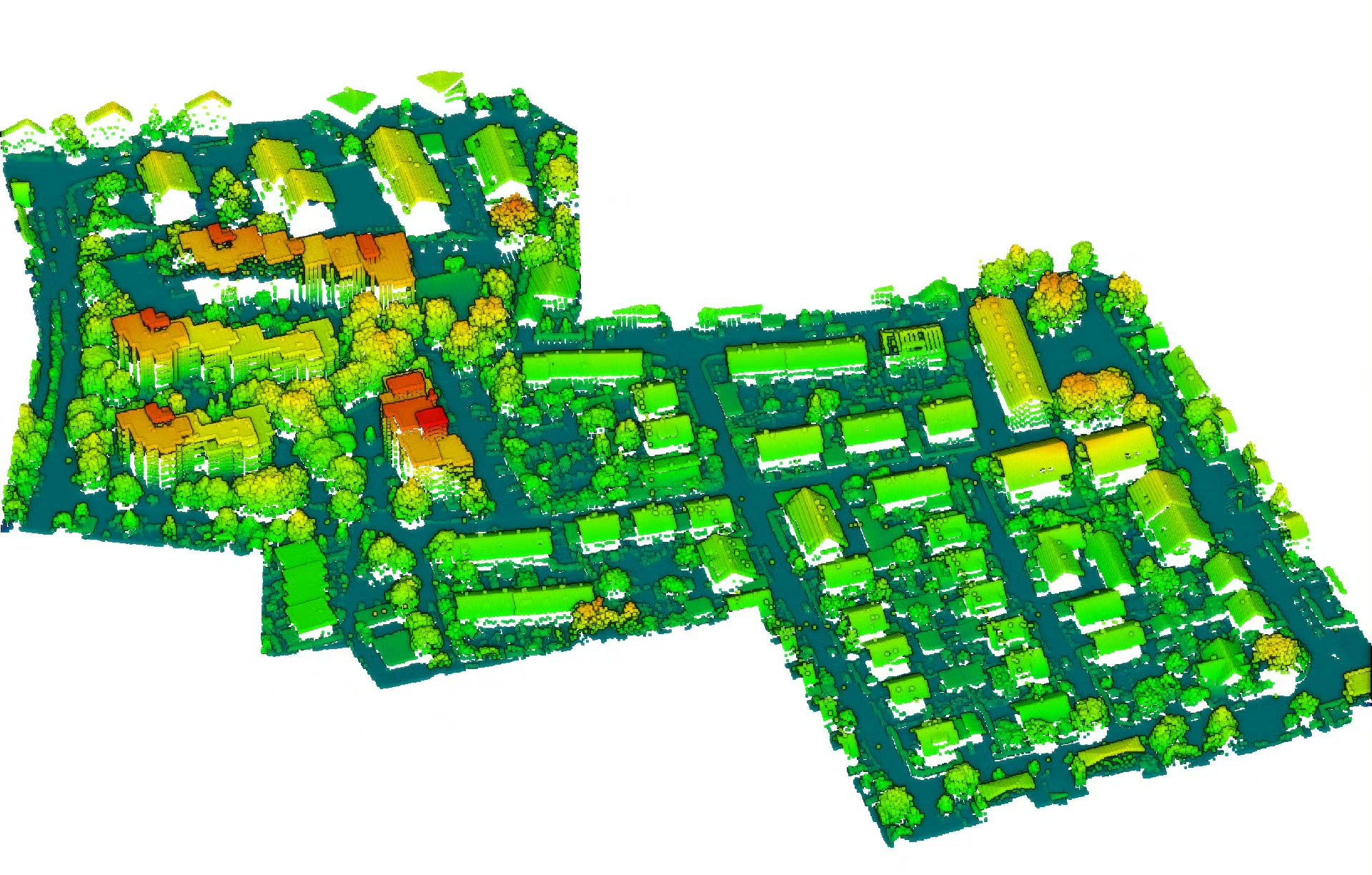
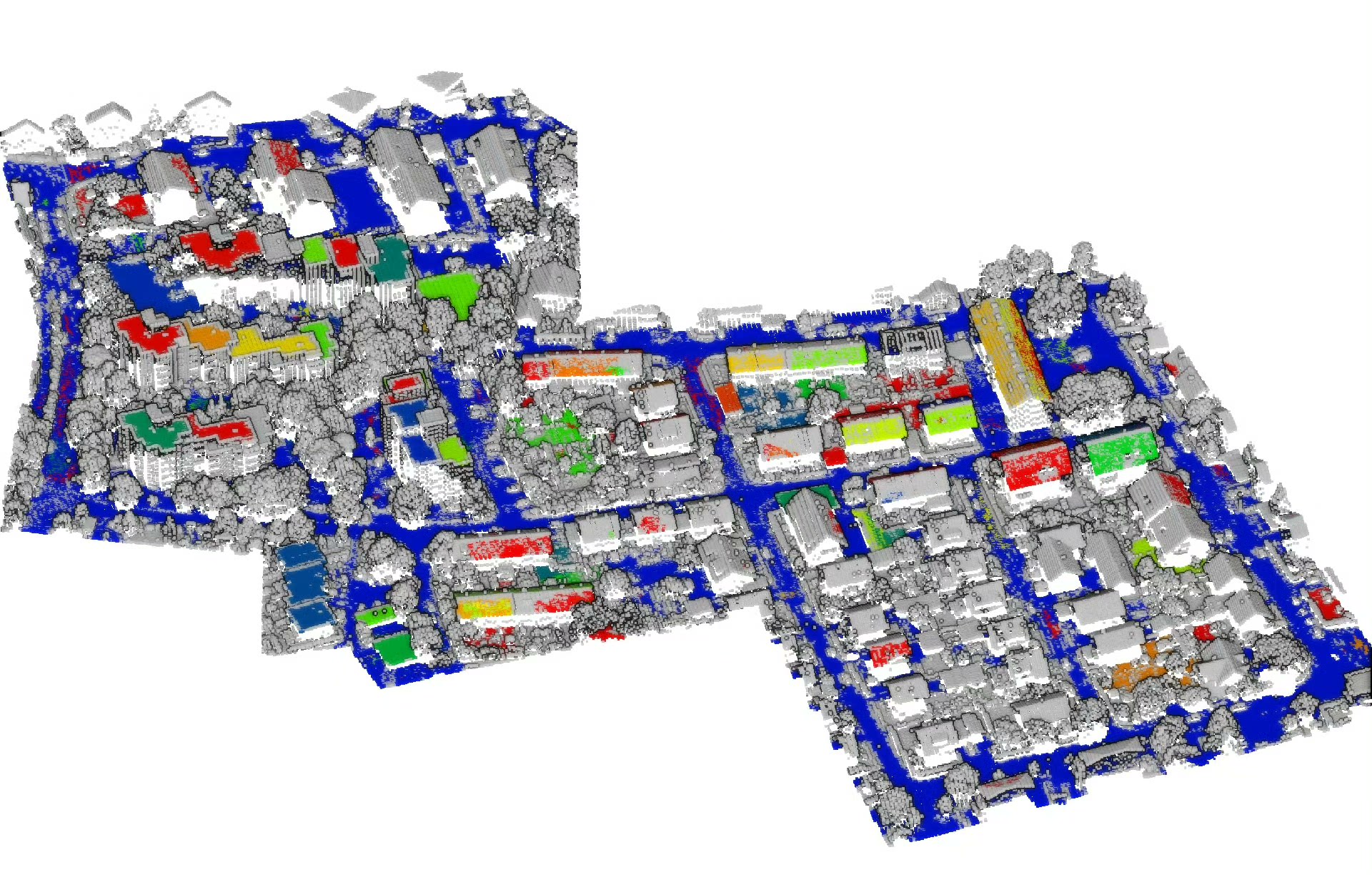
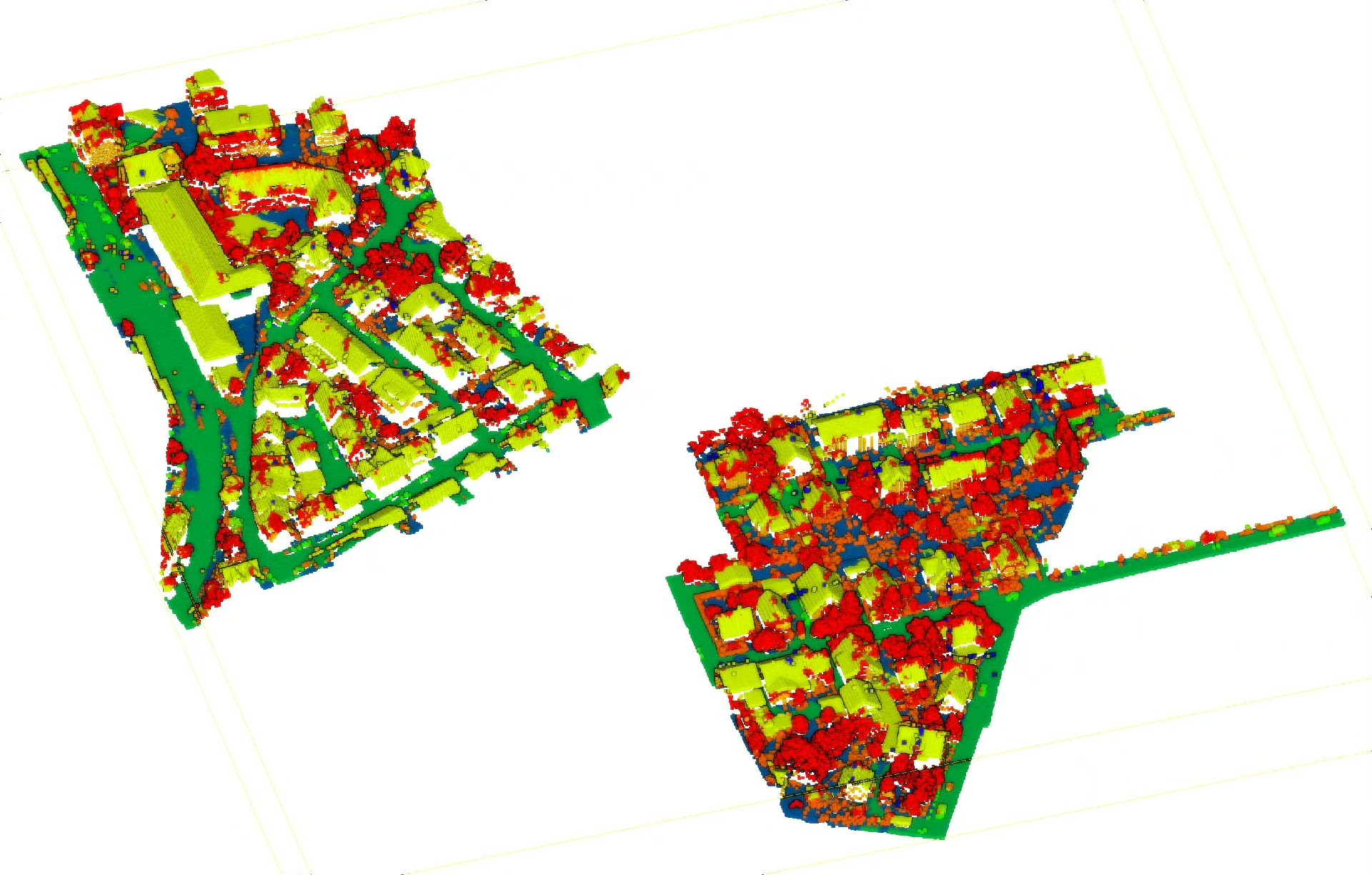
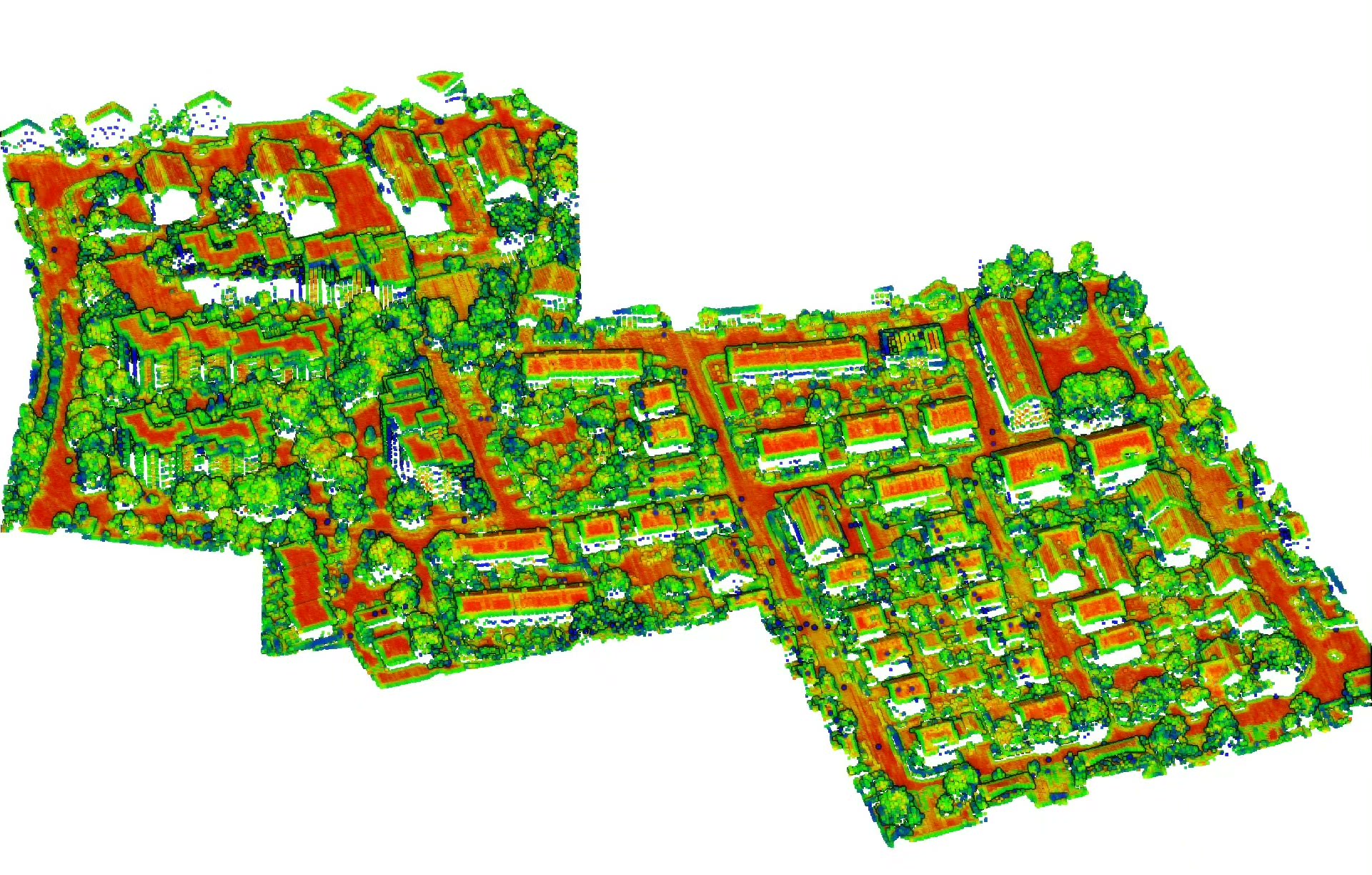
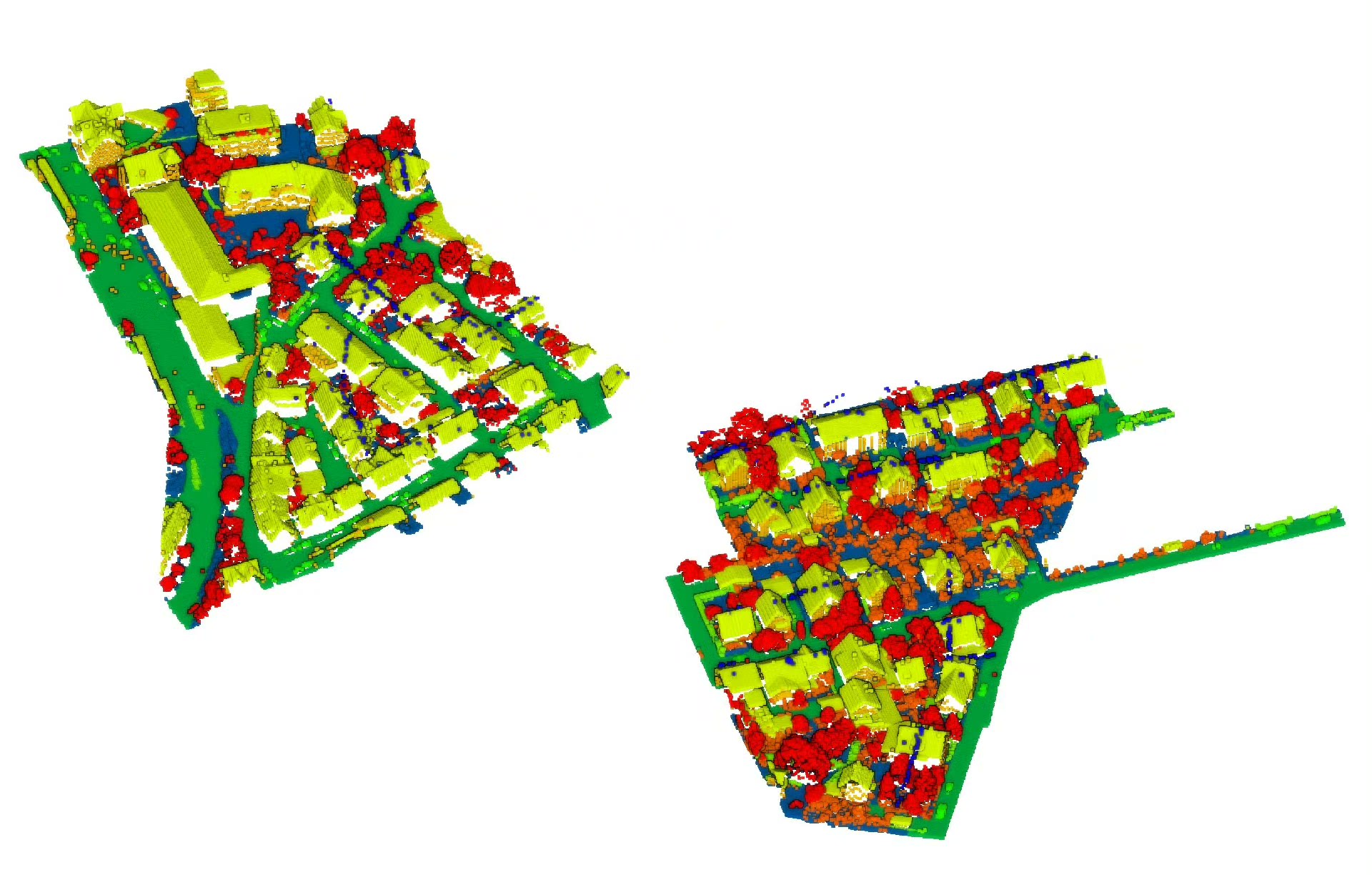
DL00279-基于深度学习的航空遥感点云分类完整代码python 由于其在能源评估、可视性分析、紧急响应、三维地籍、城市规划、变化检测、导航等各种应用中的有用性,近几十年来,三维城市模型变得越来越重要。 点云是生成逼真城市模型的主要数据来源之一。 除了基于模型的方法外,三维建筑模型还可以直接从分类的航空点云中生成。 介绍了一项关于基于分类的航空点云的三维建筑重建的正在进行的研究,无需提供辅助数据(例如建筑轮廓等)。 该工作采用了基于从点云中提取的特定几何特征的深度学习方法。 该方法在ISPRS 3D语义标注竞赛(Vaihingen和Toronto点云)上进行了测试,表现优异。
在当今数字化时代,三维城市模型因其在能源评估、可视性分析、紧急响应、三维地籍、城市规划、变化检测以及导航等众多领域的广泛应用,正变得愈发重要。而点云,作为生成逼真城市模型的关键数据来源之一,其处理和分析的技术也在不断革新。今天咱们就来聊聊基于深度学习的航空遥感点云分类,以及与之相关的完整Python代码。
三维建筑模型的生成方式多样,除了传统基于模型的方法,还能直接从分类的航空点云中构建。这里要给大家介绍一项超有趣的正在进行的研究,它致力于基于分类的航空点云进行三维建筑重建,而且厉害的是,整个过程无需辅助数据,像建筑轮廓这类都不需要。
这项研究采用的是基于从点云中提取特定几何特征的深度学习方法。下面咱们来看部分关键代码(这里代码仅为示意简化,实际场景更复杂):
import numpy as np
import tensorflow as tf
# 假设这是从点云中提取的部分几何特征数据
geometry_features = np.random.rand(1000, 10)
# 将数据转换为tensorflow能处理的格式
tensor_features = tf.convert_to_tensor(geometry_features, dtype=tf.float32)
# 构建一个简单的深度学习模型
model = tf.keras.Sequential([
tf.keras.layers.Dense(64, activation='relu', input_shape=(10,)),
tf.keras.layers.Dense(32, activation='relu'),
tf.keras.layers.Dense(1, activation='sigmoid')
])
# 编译模型
model.compile(optimizer='adam',
loss='binary_crossentropy',
metrics=['accuracy'])这段代码里,首先咱们导入了 numpy 和 tensorflow 这两个处理数据和构建深度学习模型的强大库。然后随机生成了一些模拟的点云几何特征数据 geometryfeatures,并将其转换为 tensorflow 能处理的张量格式 tensorfeatures。
DL00279-基于深度学习的航空遥感点云分类完整代码python 由于其在能源评估、可视性分析、紧急响应、三维地籍、城市规划、变化检测、导航等各种应用中的有用性,近几十年来,三维城市模型变得越来越重要。 点云是生成逼真城市模型的主要数据来源之一。 除了基于模型的方法外,三维建筑模型还可以直接从分类的航空点云中生成。 介绍了一项关于基于分类的航空点云的三维建筑重建的正在进行的研究,无需提供辅助数据(例如建筑轮廓等)。 该工作采用了基于从点云中提取的特定几何特征的深度学习方法。 该方法在ISPRS 3D语义标注竞赛(Vaihingen和Toronto点云)上进行了测试,表现优异。

接着构建了一个简单的深度学习模型。这个模型有三层,第一层输入形状是10(对应我们模拟数据中的特征维度),有64个神经元,使用 relu 激活函数,它能引入非线性,让模型有更强的表达能力。第二层有32个神经元同样用 relu 激活。最后一层只有1个神经元,用 sigmoid 激活函数,因为咱们假设这是个二分类任务(实际可能更复杂,这里为简化说明)。
最后编译模型,选择 adam 优化器来更新模型参数,损失函数用 binary_crossentropy,它在二分类问题中表现很好,同时监控准确率这个指标。
研究人员将这个方法拿到ISPRS 3D语义标注竞赛(Vaihingen和Toronto点云)中去测试,结果表现优异。这意味着这种基于深度学习且无需辅助数据,仅依靠点云特定几何特征的方法,在三维建筑重建领域有巨大潜力。不仅能让三维城市模型的构建更加高效,减少对额外数据的依赖,还能提升重建的精度和质量,为后续在各个领域的应用打下坚实基础。随着研究的深入和代码的不断优化完善,相信在未来,我们能看到基于此技术的更强大、更广泛的应用成果。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 0
0 0
0- 0



 已为社区贡献70条内容
已为社区贡献70条内容

所有评论(0)