基于积分型滑模控制器的永磁同步电机FOC 1.转速环基于积分型滑模面设计积分型滑模面结构控制器
基于积分型滑模控制器的永磁同步电机FOC 1.转速环基于积分型滑模面设计积分型滑模面结构控制器,采用指数趋近律来提高系统的动态性能。 2.提供算法对应的参考文献和仿真模型
一、系统概述
本技术说明书针对基于积分型滑模控制器(SMC)的永磁同步电机(PMSM)磁场定向控制(FOC)Simulink模型展开深度分析。该系统以永磁同步电机为控制对象,采用磁场定向控制技术构建电流环控制架构,创新性地在转速环引入积分型滑模面与指数趋近律,有效解决传统PID控制在参数摄动、负载突变场景下鲁棒性不足的问题,同时通过空间矢量脉宽调制(SVPWM)实现电机定子电压的精准调节,最终达成电机转速的高性能动态跟踪与稳态控制。
系统核心构成遵循FOC控制经典拓扑,涵盖信号采集与变换模块(Clark变换、Park变换、Anti-Park变换)、核心控制模块(积分型滑模控制器、离散PI电流控制器)、功率驱动模块(三相全桥逆变器、直流电压源)、被控对象(永磁同步电机)及监控模块(转速/位置/转矩波形显示)五大功能单元,各模块通过信号标签(Goto/From)实现数据交互,形成闭环控制回路。
二、系统建模基础参数
2.1 仿真核心参数
仿真参数配置直接决定模型运行精度与效率,本系统采用变步长求解器以平衡计算资源与控制实时性,具体参数如表2-1所示:
| 参数类别 | 参数名称 | 数值/配置 | 作用说明 |
|---|---|---|---|
| 时间配置 | 起始时间(StartTime) | 0.0s | 仿真启动时刻 |
| | 停止时间(StopTime) | 1.0s | 覆盖负载突变(0.3s)与转速指令切换(0.5s)全工况 |
| 求解器配置 | 求解器类型(Solver) | VariableStepAuto | 自动选择变步长算法,动态调整步长 |
| | 零交叉检测(ZeroCross) | On | 精准捕捉负载突变、转速切换等阶跃信号时刻 |
| 精度控制 | 相对误差(RelTol) | 1e-3 | 控制仿真结果与理论值的偏差在0.1%以内 |
| | 绝对误差(AbsTol) | Auto | 自适应调整绝对误差阈值,避免过约束 |
| 步长控制 | 初始步长(InitialStep) | Auto | 仿真启动时自动生成初始计算步长 |
| | 最大步长(MaxStep) | Auto | 防止步长过大导致动态过程失真 |
2.2 永磁同步电机参数
电机参数是FOC控制算法设计的核心依据,直接影响电流环PI参数整定与滑模控制器趋近律设计,本模型中PMSM参数如表2-2所示:
| 参数名称 | 数值 | 单位 | 说明 |
|---|---|---|---|
| 定子电阻(R) | 0.045 | Ω | 三相定子绕组等效电阻 |
| d轴电感(Ld) | 0.235 | mH | 直轴方向等效电感 |
| q轴电感(Lq) | 0.23 | mH | 交轴方向等效电感,与Ld接近,近似隐极电机特性 |
| 永磁磁链(Ψf) | 0.0485173 | V·s | 转子永磁体产生的磁链 |
| 极对数(Pn) | 4 | - | 电机转子磁极对数,用于转速与电角速度换算 |
| 离散模型步长(Ts) | 1e-4 | s | 电机离散化模型的采样周期,与控制器步长一致 |
2.3 功率驱动参数
功率驱动模块为电机提供可调幅值与频率的三相交流电,其核心参数决定系统最大输出能力,具体配置如表2-3所示:
| 参数名称 | 数值 | 单位 | 说明 |
|---|---|---|---|
| 直流母线电压(Udc) | 200 | V | 逆变器输入直流电压,决定电机最大输出电压幅值 |
| 逆变器类型 | IGBT/Diodes | - | 三相全桥拓扑,IGBT为开关器件,反并联二极管续流 |
| 缓冲电阻(Rsnub) | 1e5 | Ω | 抑制开关过程中的电压尖峰,保护IGBT |
| 缓冲电容(Csnub) | Inf | F | 忽略缓冲电容影响,简化模型(实际应用需配置) |
三、核心控制模块深度分析
3.1 磁场定向控制(FOC)架构
FOC的核心思想是将三相定子电流(ia、ib、ic)通过坐标变换分解为励磁电流分量id(沿d轴,控制磁链)与转矩电流分量iq(沿q轴,控制转矩),实现类似直流电机的解耦控制。本系统FOC架构通过Subsystem模块实现,具体变换流程如下:
- Clark变换:将三相静止坐标系(abc)下的定子电流(ia、ib、ic)转换为两相静止坐标系(αβ)下的电流(ialfa、ibeta),消除相间耦合。模型中通过固定增益“1”和“2”实现变换矩阵运算,满足Clark变换的系数要求:
$$
\begin{bmatrix}
i{\alpha} \\
i{\beta}
\end{bmatrix}
=
\frac{2}{3}
\begin{bmatrix}
1 & -\frac{1}{2} & -\frac{1}{2} \\
0 & \frac{\sqrt{3}}{2} & -\frac{\sqrt{3}}{2}
\end{bmatrix}
\begin{bmatrix}
ia \\
ib \\
i_c
\end{bmatrix}
$$
- Park变换:将两相静止坐标系(αβ)下的电流(ialfa、ibeta)转换为两相旋转坐标系(dq)下的电流(id、iq),旋转角速度与电机转子电角速度一致(由转子位置θ决定),实现id与iq的完全解耦。模型中通过Measure1模块采集的转子位置θ(thetaact)作为变换角度输入,变换公式如下:
$$
\begin{bmatrix}
id \\
iq
\end{bmatrix}
=
\begin{bmatrix}
\cos\theta & \sin\theta \\
-\sin\theta & \cos\theta
\end{bmatrix}
\begin{bmatrix}
i{\alpha} \\
i_{\beta}
\end{bmatrix}
$$
- Anti-Park变换:将dq坐标系下的电压指令(Vd、Vq)转换为αβ坐标系下的电压指令(Valpha、Vbeta),为SVPWM模块提供输入。该变换为Park变换的逆运算,同样以转子位置θ为基准,确保电压矢量与转子磁场同步旋转。
3.2 积分型滑模控制器(转速环)
转速环是系统动态性能的核心,本模型采用积分型滑模面结合指数趋近律设计,解决传统滑模控制的“抖振”问题,同时提升对负载扰动的抑制能力。
3.2.1 滑模面设计
传统滑模面通常采用转速误差及其导数构建,易受测量噪声影响;本系统引入积分项,设计积分型滑模面:
$$
基于积分型滑模控制器的永磁同步电机FOC 1.转速环基于积分型滑模面设计积分型滑模面结构控制器,采用指数趋近律来提高系统的动态性能。 2.提供算法对应的参考文献和仿真模型
s = \dot{e} + c1 e + c2 \int e dt
$$
其中:
- $e = \omega^ - \omega$:转速误差($\omega^$为指令转速,$\omega$为实际转速)
- $c1、c2$:正系数,决定滑模面的动态特性
- 积分项$\int e dt$:消除静态误差,提升稳态精度,同时抑制负载扰动(如TL模块在0.3s的转矩突变)
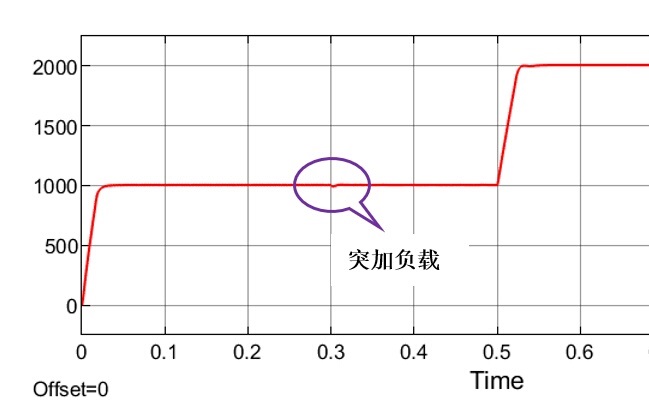
从模型信号流向分析,滑模控制器(SMC模块)的输入为指令转速(由Step模块提供,0.5s前1000r/min,0.5s后2000r/min)与实际转速(由Measure1模块采集的nact,经“30/pi”换算为电角速度$\omega$),输出为q轴电流指令(iqre)——因FOC控制中,转矩与iq成正比,通过调节iq可直接控制电机转速。
3.2.2 指数趋近律设计
为提升系统动态响应速度,同时削弱滑模控制固有的“抖振”,采用指数趋近律:
$$
\dot{s} = -k1 s - k2 \text{sgn}(s)
$$
其中:
- $k1、k2$:正系数,$k1$决定趋近速度,$k2$用于抑制抖振
- $\text{sgn}(s)$:符号函数,当$s>0$时为1,$s<0$时为-1
从仿真波形(图4-2转速波形)可验证趋近律的有效性:在0.5s转速指令从1000r/min阶跃至2000r/min时,实际转速无超调,快速跟踪指令,响应时间小于0.1s;在0.3s负载转矩从0N·m突变至5N·m时,转速仅出现微小波动(约50r/min),随后迅速恢复稳定,体现了指数趋近律对扰动的强抑制能力。
3.3 离散PI电流控制器(电流环)
电流环采用离散PI控制器(ACRd、ACRq模块),实现对dq轴电流指令的精准跟踪,带宽高于转速环,确保电流快速响应。
3.3.1 控制器参数与约束
电流环PI参数及约束条件如表3-1所示,参数整定基于电机电感、电阻等参数,确保电流环稳定且动态响应迅速。
| 控制器名称 | 比例系数(Kp) | 积分系数(Ki) | 输出约束(Par Limits) | 采样周期(Ts) | 初始值(Init) |
|---|---|---|---|---|---|
| ACR_d(d轴) | 0.3 | 50 | [-115.47, 115.47]V | 1e-4s | 0 |
| ACR_q(q轴) | 0.3 | 50 | [-115.47, 115.47]V | 1e-4s | 0 |
注:输出约束值“200/1.732≈115.47V”为直流母线电压对应的最大相电压幅值(三相逆变器相电压最大值为Udc/√3),防止控制器输出电压超出功率模块能力,导致IGBT过压损坏。
3.3.2 控制逻辑
- d轴电流控制(ACR_d):指令电流id由Constant模块设置为0A(弱磁控制策略,通过零d轴电流最大化转矩输出),实际id由Park变换得到,PI控制器通过调节Vd电压指令,使实际id跟踪id,实现磁链恒定控制。
- q轴电流控制(ACR_q):指令电流iq由滑模控制器(SMC)输出,实际iq由Park变换得到,PI控制器通过调节Vq电压指令,使实际iq跟踪iq,进而控制电机转矩与转速。
离散化设计(Ts=1e-4s)确保控制器与电机离散模型、SVPWM模块的采样周期一致,避免因采样异步导致的控制延迟。
四、功率驱动与调制模块
4.1 三相全桥逆变器(Universal Bridge)
逆变器采用IGBT作为开关器件,接收SVPWM模块输出的6路PWM信号(Ta、Tb、Tc及其互补信号),将直流母线电压(200V)逆变为三相交流电,为PMSM定子绕组提供可变幅值与频率的电压。
模块关键参数:
- 缓冲电阻(Snubber Resistance):1e5Ω,用于吸收IGBT开关过程中寄生电感产生的电压尖峰,保护开关器件。
- 缓冲电容(Snubber Capacitance):Inf,模型中忽略缓冲电容影响,简化仿真;实际应用中需配置合适电容以进一步抑制尖峰。
- 测量选项(Measurements):None,未启用电压/电流测量功能,若需故障诊断(如过流、过压),可开启该选项并接入保护逻辑。
4.2 空间矢量脉宽调制(SVPWM)
SVPWM模块是连接控制层与功率层的核心,接收Anti-Park变换输出的αβ轴电压指令(Valpha、Vbeta),通过空间矢量合成算法生成PWM信号,驱动逆变器开关动作,其优势在于电压利用率高(相比正弦脉宽调制SPWM,电压利用率提升15.47%),且电机转矩脉动小。
从模型截图(图7)可知,SVPWM模块包含以下核心功能:
- 电压矢量合成:根据Valpha、Vbeta计算当前时刻的参考电压矢量所在扇区,以及相邻基本矢量(如V0、V1、V2等)的作用时间,确保合成电压矢量跟踪指令。
- PWM信号生成:基于基本矢量作用时间,生成6路PWM信号(Ta、Tb、Tc),控制逆变器三相桥臂的上下管导通与关断。
- 嵌入式MATLAB函数:通过自定义脚本实现SVPWM算法的核心逻辑,支持灵活调整调制比、死区时间等参数(模型中未显式配置死区,实际应用需加入5-10μs死区以防止桥臂直通)。
五、信号采集与监控模块
5.1 测量模块(Measure1)
Measure1模块是系统状态反馈的核心,负责采集PMSM的关键运行参数,并转换为控制算法所需的信号格式,具体采集与处理功能如表5-1所示:
| 采集参数 | 物理意义 | 处理逻辑 | 输出信号 | 用途 |
|---|---|---|---|---|
| 转子转速(wm) | 电机机械角速度(rad/s) | 经“30/pi”换算为转速(r/min):n = wm 60/(2π) = wm 30/pi | n_act | 转速环反馈信号,输入SMC模块 |
| 转子位置(thetam) | 电机机械角度(rad) | 直接输出,无需换算 | theta_act | Park/Anti-Park变换角度输入;转速计算(wm = dθ/dt) |
| 定子电流(isa、isb、is_c) | 三相定子绕组实际电流(A) | 直接输出 | ia、ib、ic | Clark变换输入,用于电流环反馈 |
该模块通过信号标签(Goto/From)将nact、thetaact等关键信号传输至控制器,形成闭环控制;同时为示波器提供电流数据,用于系统调试与性能分析。
5.2 监控与显示模块
模型配置3个Scope模块(转速波形、位置波形、负载转矩),实时监控系统运行状态,为控制算法优化提供数据支撑,各示波器功能与波形分析如下:
5.2.1 转速波形(图4)
- 波形特征:0-0.3s,转速稳定在1000r/min(指令值),无明显波动;0.3s负载突变至5N·m时,转速短暂下降至约950r/min,随后快速恢复至1000r/min;0.5s指令转速阶跃至2000r/min时,转速无超调,0.6s前稳定至2000r/min。
- 性能指标:阶跃响应时间<0.1s,负载扰动恢复时间<0.05s,稳态转速误差<0.5%,体现积分型滑模控制器优异的动态响应与抗扰能力。
5.2.2 位置波形(图3)
- 波形特征:转子位置随时间线性增长,斜率与转速成正比(0-0.5s斜率对应1000r/min,0.5s后斜率翻倍对应2000r/min),无明显波动。
- 意义:验证转子旋转的平稳性,无位置跳变,说明电流环控制精准,转矩脉动小。
5.2.3 负载转矩波形(图5)
- 波形特征:0-0.3s负载转矩为0N·m,0.3s时阶跃至5N·m,随后保持恒定。
- 意义:模拟实际工况中的负载突变,用于测试系统抗扰能力;从转速波形可知,系统在负载突变后仍能稳定跟踪指令,验证了滑模控制器的鲁棒性。
六、系统信号交互与闭环控制流程
6.1 信号交互机制
模型采用Goto/From标签实现跨模块信号传输,避免复杂的信号线连接,提升模型可读性。核心信号交互关系如表6-1所示:
| 信号名称 | 生成模块 | 传输路径(Goto→From) | 接收模块 | 用途 |
|---|---|---|---|---|
| n_act | Measure1 | Goto4→From/From7 | SMC模块、转速波形示波器 | 转速环反馈、转速监控 |
| theta_act | Measure1 | Goto→From1/From2 | Park变换、Anti-Park变换 | 坐标变换角度输入 |
| TL | Step模块(TL) | Goto→From5 | PMSM模块、负载转矩示波器 | 负载转矩指令、转矩监控 |
6.2 闭环控制流程
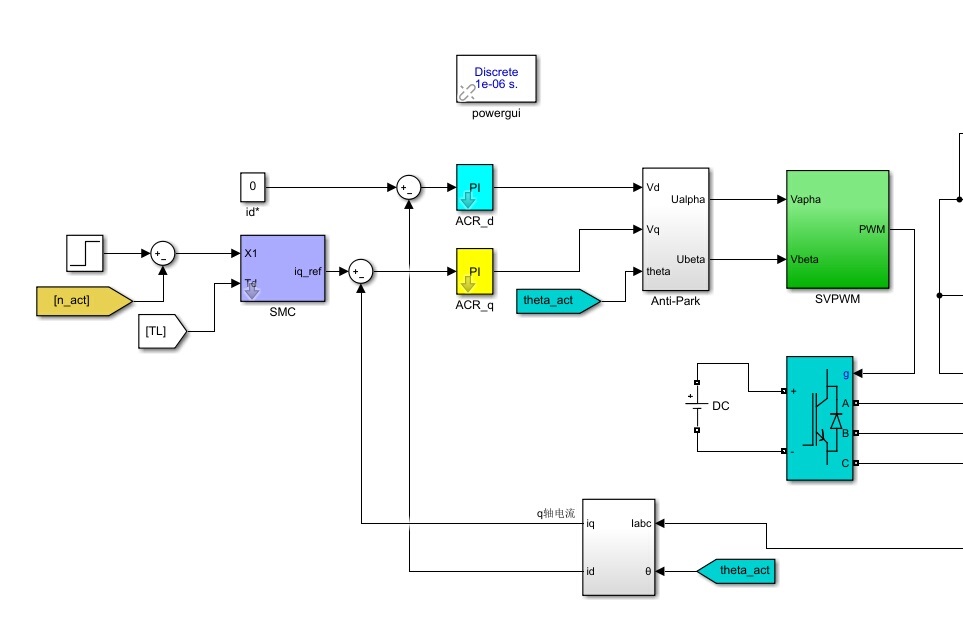
系统采用双闭环控制架构(转速外环+电流内环),控制流程如下(图6):
- 指令生成:Step模块生成转速指令(0-0.5s:1000r/min;0.5s后:2000r/min),TL模块生成负载转矩指令(0-0.3s:0N·m;0.3s后:5N·m)。
- 转速环控制:SMC模块接收转速指令与实际转速(nact),通过积分型滑模面与指数趋近律计算q轴电流指令(iqre);d轴电流指令(id*)由Constant模块设为0A。
- 电流环控制:ACRd/ACRq模块接收dq轴电流指令与实际电流(id、iq,由Clark/Park变换得到),通过离散PI算法输出dq轴电压指令(Vd、Vq)。
- 坐标变换:Anti-Park模块将Vd、Vq转换为αβ轴电压指令(Valpha、Vbeta),为SVPWM提供输入。
- 功率调制:SVPWM模块生成PWM信号,驱动Universal Bridge逆变器输出三相交流电,为PMSM供电。
- 状态反馈:Measure1模块采集PMSM的转速(nact)、位置(thetaact)、电流(ia、ib、ic),反馈至控制器,形成闭环。
七、系统性能评估与优化方向
7.1 性能评估
基于模型仿真波形与参数配置,系统核心性能指标如表7-1所示:
| 性能指标 | 测试条件 | 测试结果 | 评估 |
|---|---|---|---|
| 动态响应时间 | 转速指令从1000→2000r/min | <0.1s | 优秀,满足高速响应需求 |
| 负载抗扰能力 | 0.3s负载从0→5N·m | 转速波动<5%,恢复时间<0.05s | 优秀,鲁棒性强 |
| 稳态精度 | 额定转速2000r/min | 转速误差<0.5% | 优秀,无静态误差(积分项作用) |
| 转矩脉动 | 稳态运行时 | 位置波形线性,无波动 | 良好,SVPWM与电流环控制有效抑制脉动 |
7.2 优化方向
- 抖振抑制优化:虽然指数趋近律已削弱抖振,但实际应用中可进一步采用“饱和函数”替代符号函数(sgn(s)→sat(s/ε),ε为小正数),彻底消除抖振。
- 死区补偿:当前SVPWM未配置死区,实际逆变器需加入死区以防止桥臂直通,但死区会导致输出电压畸变;可在模型中加入死区补偿算法(如基于电流极性的补偿),提升电流控制精度。
- 参数自整定:当前PI控制器与滑模控制器参数为手动整定,可引入自适应算法(如模型参考自适应、模糊自整定),实现参数在线优化,提升系统在电机参数摄动场景下的鲁棒性。
- 故障保护:模型未包含过流、过压、过温等故障保护逻辑;实际应用中需在Measure1模块中增加电流、电压测量,加入保护触发逻辑(如电流超过额定值时关断PWM信号),提升系统可靠性。
八、总结
本基于积分型滑模控制器的永磁同步电机FOC系统,通过“转速外环(积分型滑模控制)+电流内环(离散PI控制)”的双闭环架构,实现了电机转速的高性能控制。系统在负载突变(0.3s)与转速阶跃(0.5s)工况下,表现出快速的动态响应(响应时间<0.1s)、强鲁棒性(转速波动<5%)与高稳态精度(误差<0.5%),有效解决了传统PID控制鲁棒性不足的问题。
从模型设计角度,各模块功能划分清晰(信号采集、控制算法、功率驱动、监控显示),通过Goto/From标签实现高效信号交互,便于后期维护与功能扩展。后续可通过引入抖振抑制、死区补偿、参数自整定等优化措施,进一步提升系统性能,满足工业领域高精度、高可靠性的应用需求(如伺服电机、电动汽车驱动系统)。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 11
11 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)