单目相机标定的方法
单目相机标定是通过棋盘格标定板计算相机内参(焦距、主点坐标、畸变系数)和外参(旋转矩阵、平移向量)的过程。标定步骤包括:1)在不同位置拍摄多张标定板图像;2)使用OpenCV检测图像中的角点坐标;3)将角点坐标与对应世界坐标输入标定算法(如张正友标定法)计算相机参数。示例代码展示了如何使用OpenCV实现这一过程,包括角点检测、参数计算及结果输出。标定结果可用于消除图像畸变,实现精确的视觉测量和三
·
一、标定概述
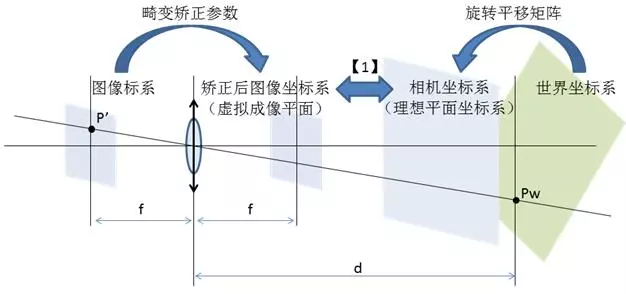
单目相机标定的主要目标是计算相机的内参和外参。内参包括焦距、主点坐标和畸变系数,用于描述相机的光学特性;外参包括旋转矩阵和平移向量,用于描述相机在世界坐标系中的位置和方向。通过标定,可以消除图像中的畸变,并将图像坐标转换为世界坐标,实现更为精确的视觉测量和三维重建。
二、标定方法
单目相机标定通常使用棋盘格标定板进行。首先,将标定板放置在相机视野内,并从不同角度和位置拍摄多张包含标定板的图像。然后,通过图像处理算法,检测这些图像中的角点位置,并计算这些角点在世界坐标系中的对应位置。接下来,利用这些对应关系,使用标定算法(如张正友标定法)求解出相机的内参和外参。
三、标定步骤
1.准备工作:
在均匀光照条件下,将棋盘格标定板固定在不同位置,并使用单目相机拍摄多张包含标定板的图像。确保标定板在图像中有足够的角点被检测到,并且这些图像覆盖了不同的视角和位置。
2.角点检测:
使用开源计算机视觉库(如OpenCV)中的角点检测算法,提取每张图像中的棋盘格角点坐标。这些角点坐标将作为标定算法的输入数据。
3.标定计算:
将提取的角点坐标和对应的世界坐标输入标定算法,计算相机的内参。常用的标定算法如张正友标定法,可以在OpenCV中方便地实现。
四、源代码
import cv2
import numpy as np
import glob
#设置棋盘格参数
w_grid = 12 #棋盘格宽方向上的格数
h_grid = 9 #棋盘格高方向上的格数
block_width = 25 #棋盘格单个格子的宽度 (单位 mm)
#设置用于校准图片地址,其中图片为jpg格式存储在calibration文件夹中
images_path = glob.glob('./calibration/*.jpg') # 加载拍摄的棋盘格图片文件地址
# 找棋盘格角点
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001) # 阈值
w = w_grid-1
h = h_grid-1
objp = np.zeros((w*h,3), np.float32)
objp[:,:2] = np.mgrid[0:w,0:h].T.reshape(-1,2)
objp = objp*block_width
# 储存棋盘格角点的世界坐标和图像坐标对
objpoints = [] # 存储在世界坐标系中的三维点
imgpoints = [] # 存储在图像平面的二维点
for fname in images_path:
img = cv2.imread(fname)
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# 找到棋盘格角点
ret, corners = cv2.findChessboardCorners(gray, (w,h),None)
# 如果找到足够点对,将其存储起来
if ret == True:
cv2.cornerSubPix(gray,corners,(11,11),(-1,-1),criteria)
objpoints.append(objp)
imgpoints.append(corners)
#调用opencv相机校准函数
ret, mtx, dist, rvecs, tvecs = \
cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)
print("相机内参:\n",mtx) # 内参数矩阵
print("畸变系数:\n",dist ) # 畸变系数

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 12
12 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)