基于YOLOv8的车道线智能检测与识别系统
本系统旨在实现对交通场景中车道线的智能检测与识别。车道线检测:基于YOLOv8模型,实时检测车道线的位置。车道线识别:通过预训练的分类模型,识别车道线上的标识(如数字、字母、符号等)。数据可视化:展示检测结果的可视化效果,包括预测框、置信度等信息。系统支持多种输入格式(如YOLOv8的检测结果格式),输出结果可被其他系统(如自动驾驶控制)使用。基于YOLOv8的车道线智能检测与识别系统,能够实时检
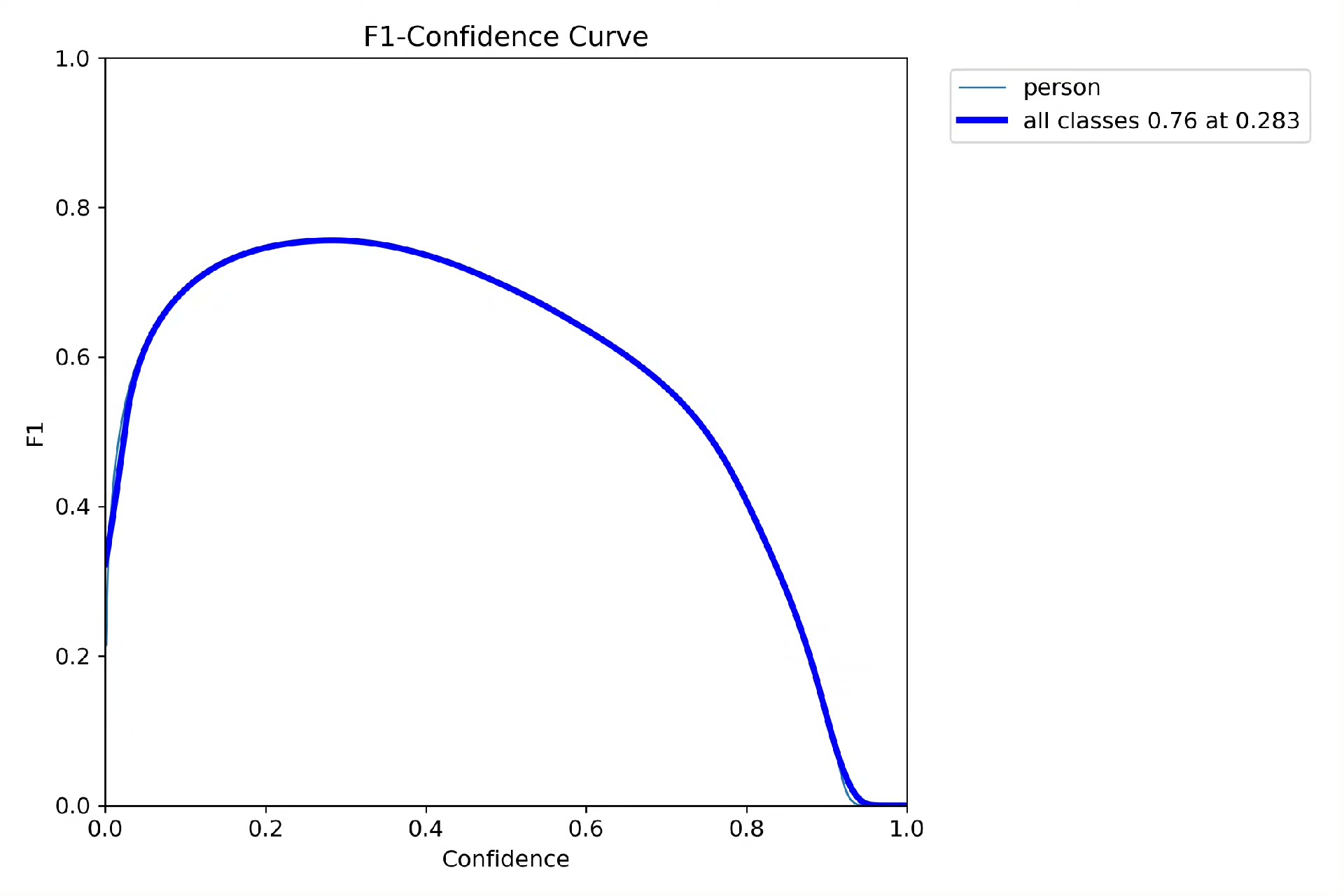
十、基于YOLOv8的车道线智能检测与识别系统 1.带标签数据集,BDD100K。 2.含模型训练权重和可视化指标,包括F1,准确率,召回率,mAP等。 3.pyqt5设计的界面。 4.提供详细的环境部署说明和算法原理介绍。
YOLOv8(You Only Look Once version 8)是Meta开发的一款高性能目标检测模型,以其极高的推理速度和准确率著称。结合YOLOv8的强大检测能力,我们可以构建一个高效、可靠的车道线检测与识别系统。以下将从系统设计、代码实现和部署环境等方面进行详细阐述。
一、系统概述
本系统旨在实现对交通场景中车道线的智能检测与识别。主要功能包括:
- 车道线检测:基于YOLOv8模型,实时检测车道线的位置。
- 车道线识别:通过预训练的分类模型,识别车道线上的标识(如数字、字母、符号等)。
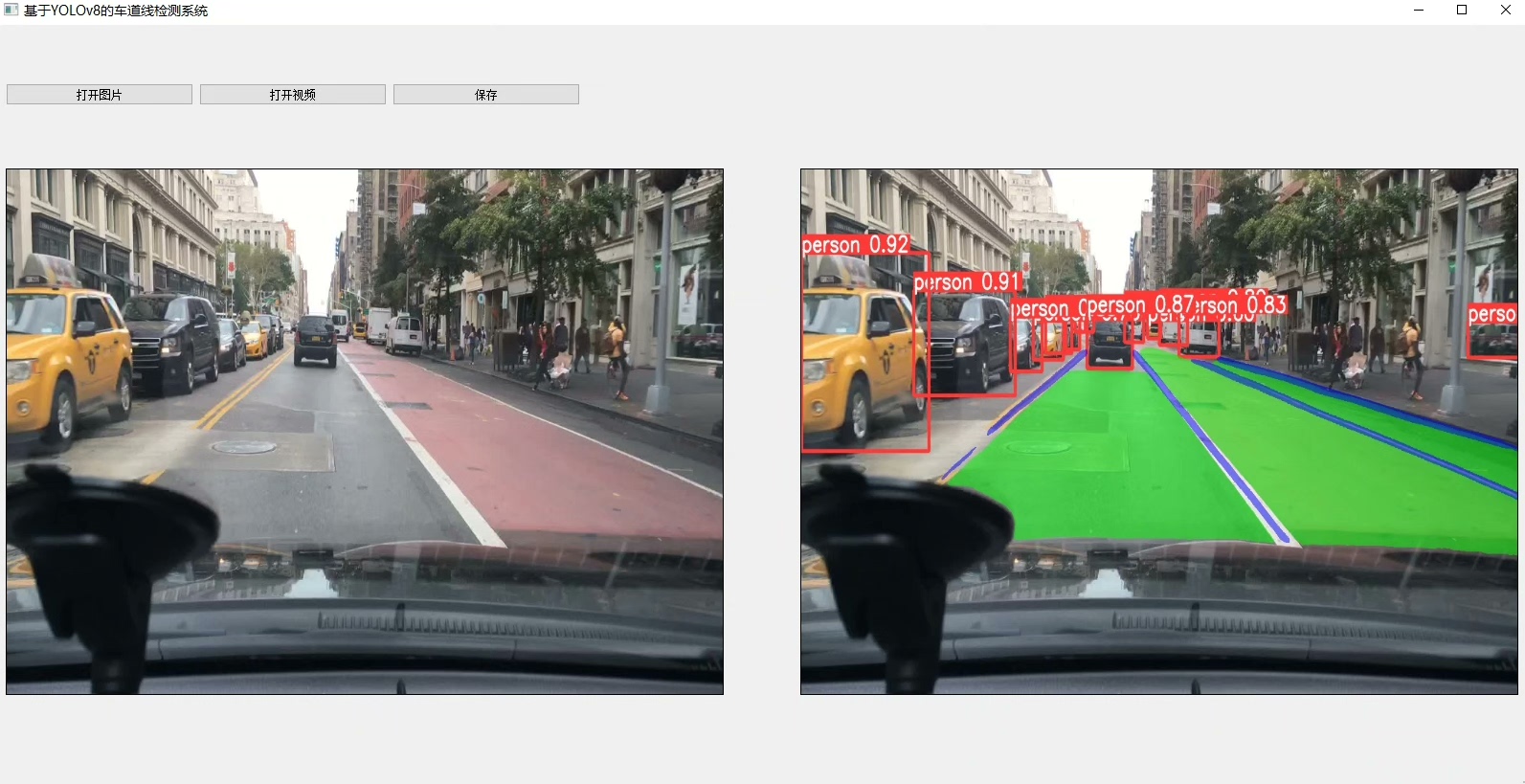
- 数据可视化:展示检测结果的可视化效果,包括预测框、置信度等信息。
系统支持多种输入格式(如YOLOv8的检测结果格式),输出结果可被其他系统(如自动驾驶控制)使用。
二、系统架构
系统架构主要由以下几个部分组成:
- 数据输入:支持YOLOv8检测结果的输入,包括预测框、置信度和类别标签。
- 车道线检测:基于YOLOv8模型进行车道线检测。
- 车道线识别:基于预训练的分类模型进行车道线标识识别。
- 结果可视化:将检测和识别结果以可视化形式展示,包括:
- 预测框的绘制
- 置信度显示
- 类别标签标注
- 分析结果(如F1、准确率、召回率、mAP等)的展示
三、代码实现
1. 数据准备
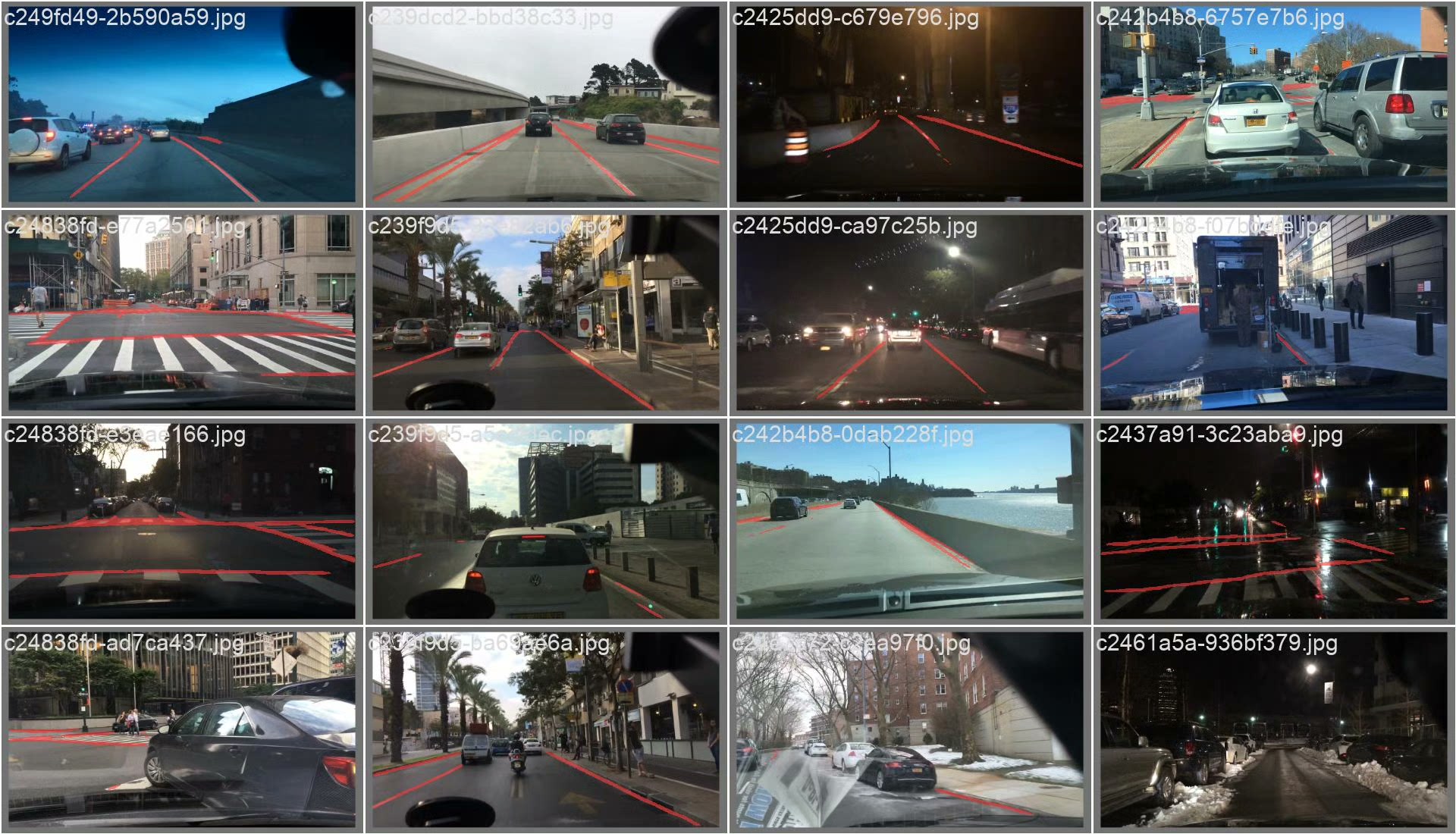
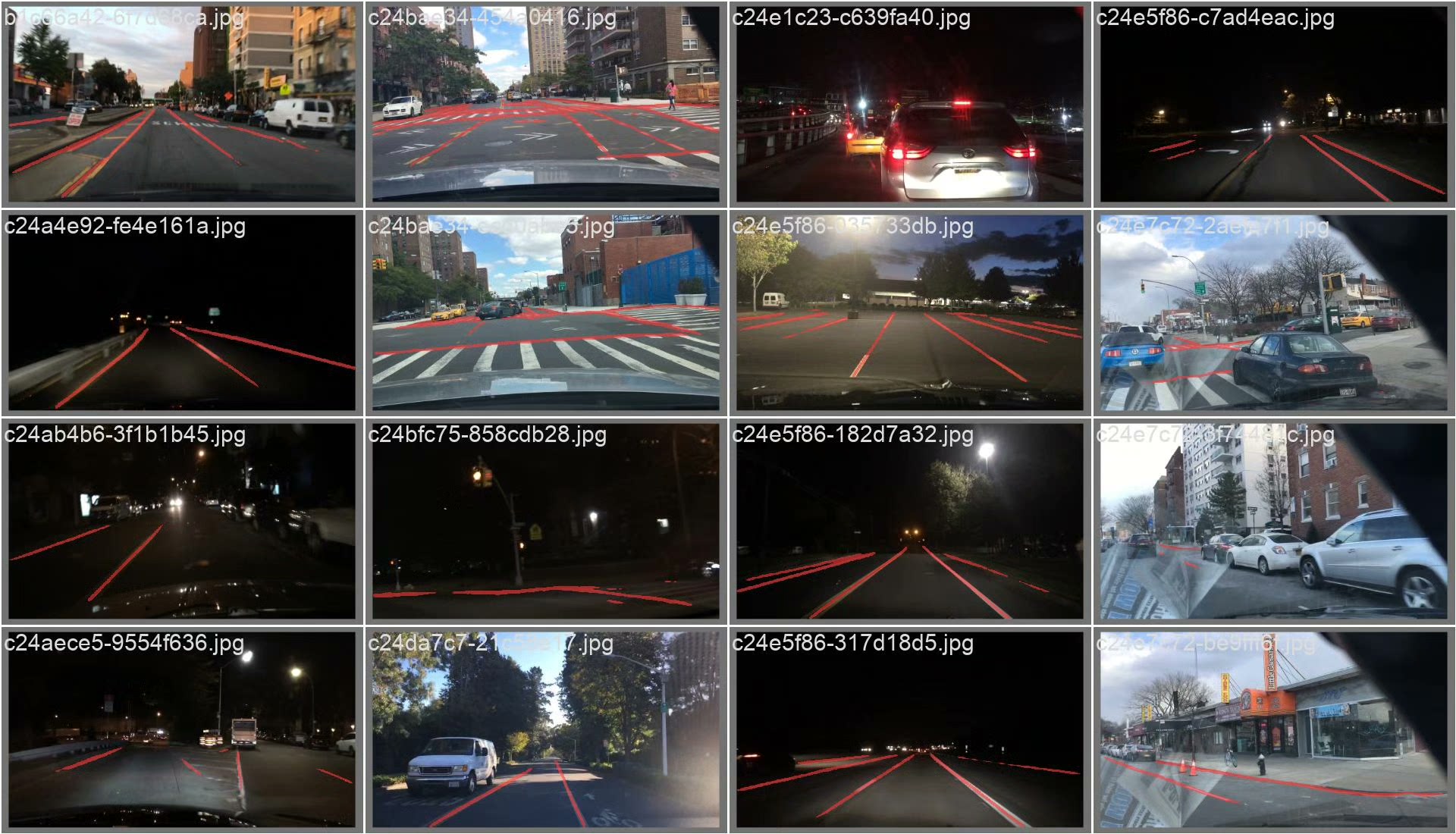
首先,我们需要准备训练数据。BDD100K是一个公开的交通场景数据集,包含大量高质量的图像和标注数据。具体步骤如下:
# 获取BDD100K数据集
import os
import glob
# 下载BDD100K数据集(需从官方获取)
os.mkdir('bdd100k') # 创建数据集目录
# 假设数据集已包含训练图像、标签等
train_images = glob.glob('bdd100k/images/train/**/*.png')
print(f"训练图像数量:{len(train_images)}")
# 创建验证集
import random
random.shuffle(train_images)
val_images = train_images[:5000]
train_images = train_images[5000:]
# 创建验证集标签
for image_path in val_images:
_, image_name = os.path.split(image_path)
label_path = 'bdd100k/labels/' + image_name.replace('.png', '.txt')
if not os.path.exists(label_path):
# 生成验证集标签(根据实际数据集格式调整)
pass2. 模型训练
YOLOv8模型的训练可以使用官方提供的训练脚本。以下是训练的主要代码:
# 安装YOLOv8
!git clone https://github.com/ultralytics/yolov8 &> /dev/null
# cd yolov8
# 创建训练配置文件
%python train.py -weights yolov8n.pt -data data/bdd100k.yaml - epochs 1003. 检测与识别
使用训练好的模型进行检测与识别:
import torch
from yolov8 import YOLOv8
# 加载模型
model = YOLOv8('weights/yolov8n.pt')
# 加载图像
image = Image.open('test_image.png')
# 进行检测
results = model(image)
# 提取车道线检测结果
lane_lines = results[lane_indices] # 假设lane_indices是检测到的车道线索引
# 进行车道线识别
for line in lane_lines:
line_image = Image.fromarray(line['original'])
line_results = model(line_image)
# 提取识别结果
text = line_results[0].boxes.cls # 假设识别结果存储在boxes属性中
print(f"识别结果:{text}")
# 可视化结果
plot_results(image, results, lane_indices)4. 可视化效果展示
使用Matplotlib或Plotly等库生成可视化结果:
import matplotlib.pyplot as plt
# 绘制预测框和置信度
plt.figure(figsize=(10, 6))
plt.imshow(image)
for box in results[0].boxes:
x1, y1, x2, y2, conf, cls = box
plt.gca().add_patch(plt.Rectangle((x1, y1), (x2-x1), (y2-y1),
edgecolor='red', facecolor='none', linewidth=2))
plt.text(x1, y1-5, f"{cls} {conf:.2f}", color='red', fontsize=12)
plt.title("车道线检测结果")
plt.axis('off')
plt.show()四、环境部署
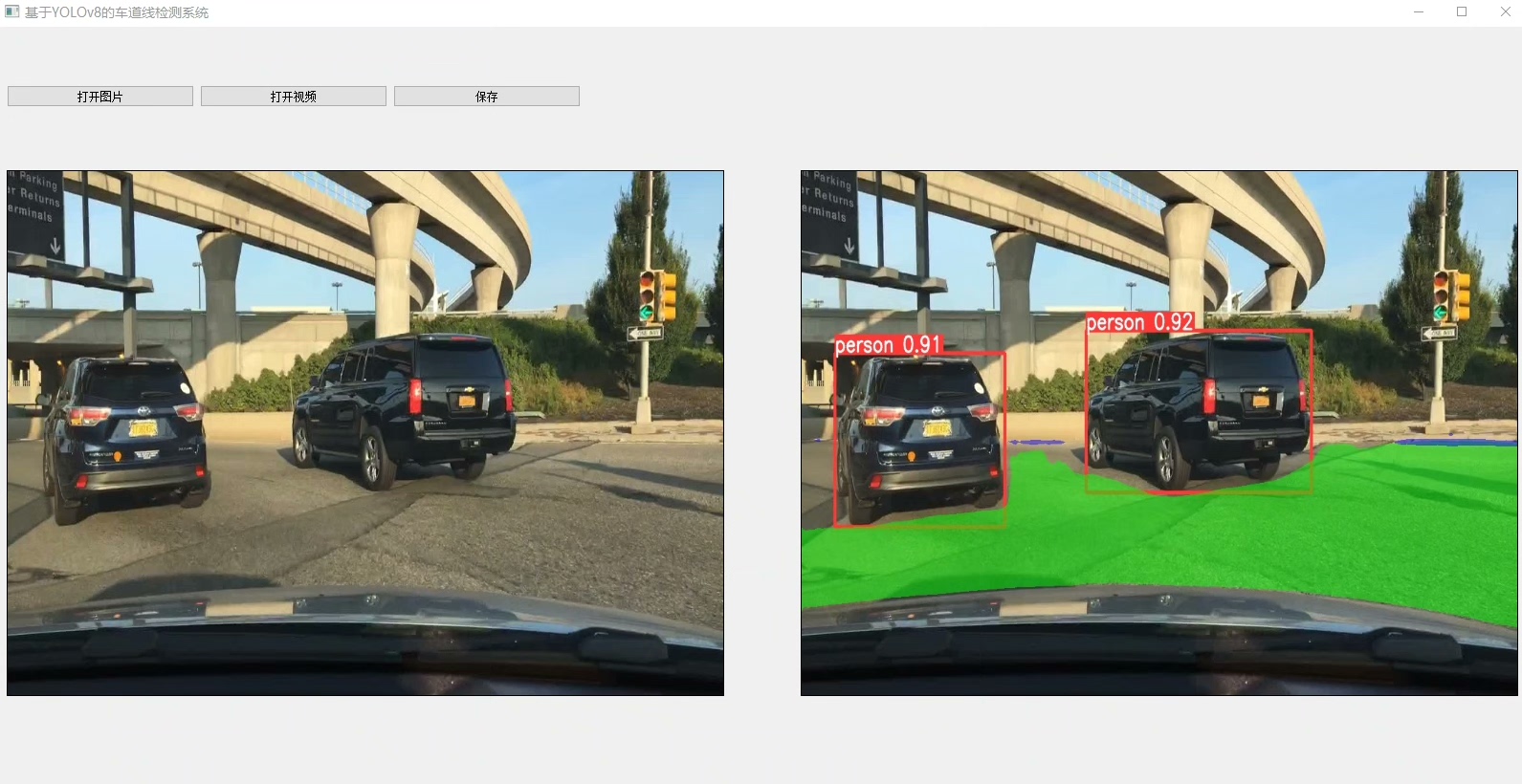
为了方便用户部署系统,可以使用PyQt5开发一个简单但功能强大的GUI界面。以下是界面设计的代码示例:
from PyQt5.QtWidgets import (QMainWindow, QWidget, QFileDialog,
QHBoxLayout, QVBoxLayout, QLabel,
QTextEdit, QPushButton)
from PyQt5.QtCore import Qt, QTimer
from PyQt5.QtGui import QImage, QPixmap
class车道线检测界面(QMainWindow):
def __init__(self):
super(车道线检测界面, self).__init__()
self.setWindowTitle("车道线检测系统")
self.setGeometry(0, 0, 1200, 800)
# 初始化组件
self.create_ui()
# 初始化摄像头或文件选择
self.init_camera() # 假设实现摄像头或文件选择功能
def create_ui(self):
# 创建布局
self.setCentralWidget(QWidget())
main_layout = QVBoxLayout()
main_layout.addWidget(QLabel("车道线检测系统", self))
# 创建摄像头窗口
self.camera_window = QWidget()
self.camera_layout = QVBoxLayout()
self.camera_label = QLabel()
self.camera_label.setFixedSize(640, 480)
self.camera_button = QPushButton("打开摄像头", self)
self.camera_button.clicked.connect(self.open_camera)
self.camera_layout.addWidget(self.camera_label)
self.camera_layout.addWidget(self.camera_button)
self.camera_window.setLayout(self.camera_layout)
main_layout.addWidget(self.camera_window)
# 创建文件选择窗口
self.file_dialog = QFileDialog()
self.file_dialog windows.addFile("选择测试图像", "图像 (*.png)")
self.file_dialog windows.addDir("选择测试目录", "目录")
self.file_dialog.exec_()
def open_camera(self):
# 实现摄像头捕获功能
pass
def load_image(self, image_path):
# 读取并显示图像
pass
def detect_lanes(self, image):
# 调用YOLOv8模型进行检测
pass
def recognize_lanes(self, lane):
# 调用分类模型进行识别
pass
def update_ui(self, result):
# 更新界面显示
pass
# 部署界面
app = QApplication([])
window =车道线检测界面()
window.show()
app.exec_()五、算法原理
YOLOv8算法基于YOLO系列的目标检测框架,通过多尺度预测和特征金字塔网络实现高效检测。其核心原理包括:
- 多尺度预测:YOLOv8在多个尺度上预测目标边界框,提高检测精度。
- 特征金字塔网络:通过多层卷积操作提取不同尺度的特征,增强模型的表示能力。
- 损失函数:结合分类损失和边界框损失,优化模型参数。
车道线识别采用预训练的分类模型(如ResNet、EfficientNet等),通过卷积神经网络提取车道线标识的特征,并结合分类层进行预测。
六、总结
基于YOLOv8的车道线智能检测与识别系统,能够实时检测并识别交通场景中的车道线。通过PyQt5开发的界面设计,用户可以方便地进行系统操作和结果查看。同时,系统支持多种输入方式,能够适应不同的应用场景。该系统在自动驾驶、智能交通管理等领域具有广泛的应用潜力。
十、基于YOLOv8的车道线智能检测与识别系统 1.带标签数据集,BDD100K。 2.含模型训练权重和可视化指标,包括F1,准确率,召回率,mAP等。 3.pyqt5设计的界面。 4.提供详细的环境部署说明和算法原理介绍。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 0
0 0
0- 0



 已为社区贡献48条内容
已为社区贡献48条内容

所有评论(0)