三相异步电机Simulink仿真:校企合作项目的实践探索
三相异步电机simulink仿真 中南大学与山河智能合作开发电动叉车的校企合作项目的仿真模型,感应电机FOC仿真,电机参数是山河智能SWFE15型起重量1.5吨电动叉车使用的实际电机。 采用转速电流双闭环,转子磁场定向FOC,防饱和PI调节器,PI输出带限幅,SVPWM发波,仿真工况涵盖带负载启动,加减速,发电运行,过载运行等工况,电流波形正弦度很好,模型实用价值较高。 附赠部分优质异步电机矢量控制相关文献。
最近参与了中南大学与山河智能合作开发电动叉车的校企合作项目,其中三相异步电机的Simulink仿真部分特别有意思,今天就来跟大家分享一下。
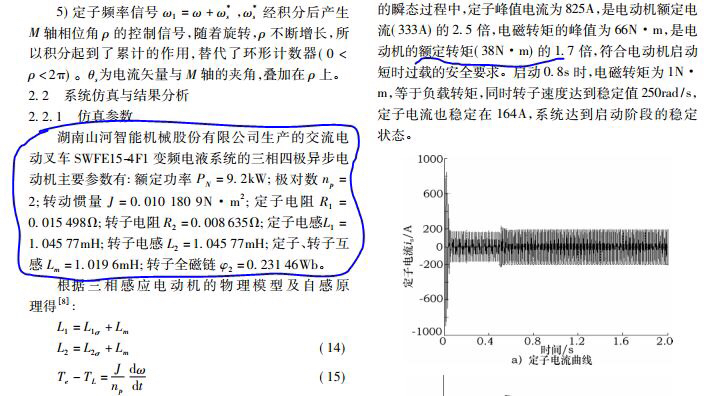
这个项目聚焦于电动叉车的感应电机FOC(磁场定向控制)仿真,所采用的电机参数来自山河智能SWFE15型1.5吨起重量电动叉车的实际电机,非常贴近实际应用场景。
控制策略与关键模块
转速电流双闭环 + 转子磁场定向FOC
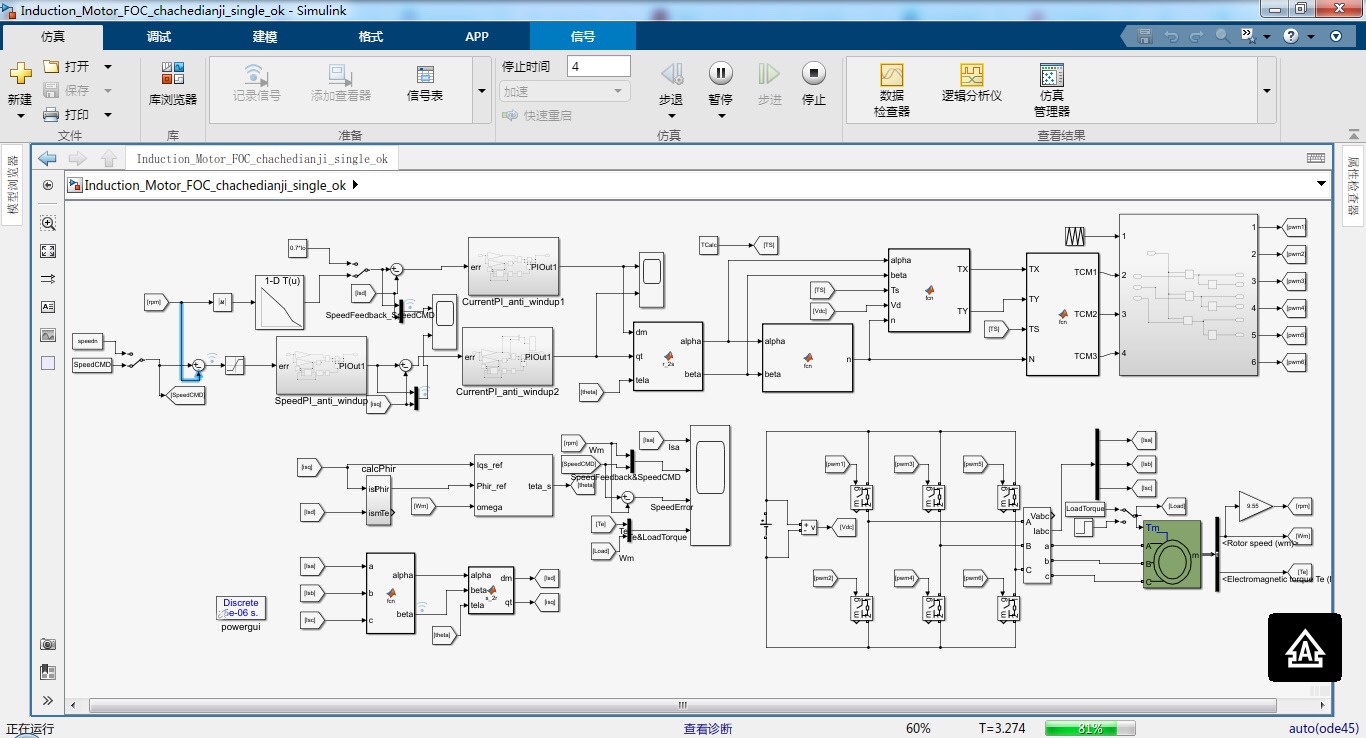
在整个控制架构中,转速电流双闭环与转子磁场定向FOC是核心。转速环的作用是根据给定转速与实际转速的差值,输出一个期望的电流值。而电流环则负责让实际电流跟踪这个期望值。
以Matlab代码简单示意转速环PI调节器部分:
% 转速环PI参数
kp_speed = 0.5;
ki_speed = 0.1;
% 初始值
integral_speed = 0;
prev_error_speed = 0;
% 计算转速环输出
function output = speed_PI(speed_ref, speed_actual, dt)
error_speed = speed_ref - speed_actual;
integral_speed = integral_speed + error_speed * dt;
p_term = kp_speed * error_speed;
i_term = ki_speed * integral_speed;
output = p_term + i_term;
prev_error_speed = error_speed;
end这段代码里,kpspeed 和 kispeed 分别是比例和积分系数,通过调整它们可以优化转速环的响应。integral_speed 用于累计误差,从而实现积分作用。
防饱和PI调节器与PI输出限幅
为了避免PI调节器输出过大或过小导致系统不稳定,采用了防饱和PI调节器并且对PI输出进行限幅。
% 限幅函数
function limited_value = saturation_limit(value, min_limit, max_limit)
if value < min_limit
limited_value = min_limit;
elseif value > max_limit
limited_value = max_limit;
else
limited_value = limited_value;
end
end这段简单的限幅代码,确保PI调节器的输出在合理范围内,防止系统失控。
SVPWM发波
SVPWM(空间矢量脉宽调制)发波技术能有效提高直流电压利用率,并且使输出电流波形更加接近正弦波。在Simulink中搭建SVPWM模块,它会根据输入的电压矢量合成参考电压矢量,并输出对应的PWM波来控制逆变器。
仿真工况与结果
仿真工况涵盖了带负载启动、加减速、发电运行、过载运行等各种实际可能遇到的情况。经过测试,电流波形正弦度非常好,这意味着电机能更平稳地运行,减少了谐波带来的负面影响。这种良好的电流波形得益于前面提到的各种控制策略的协同工作。
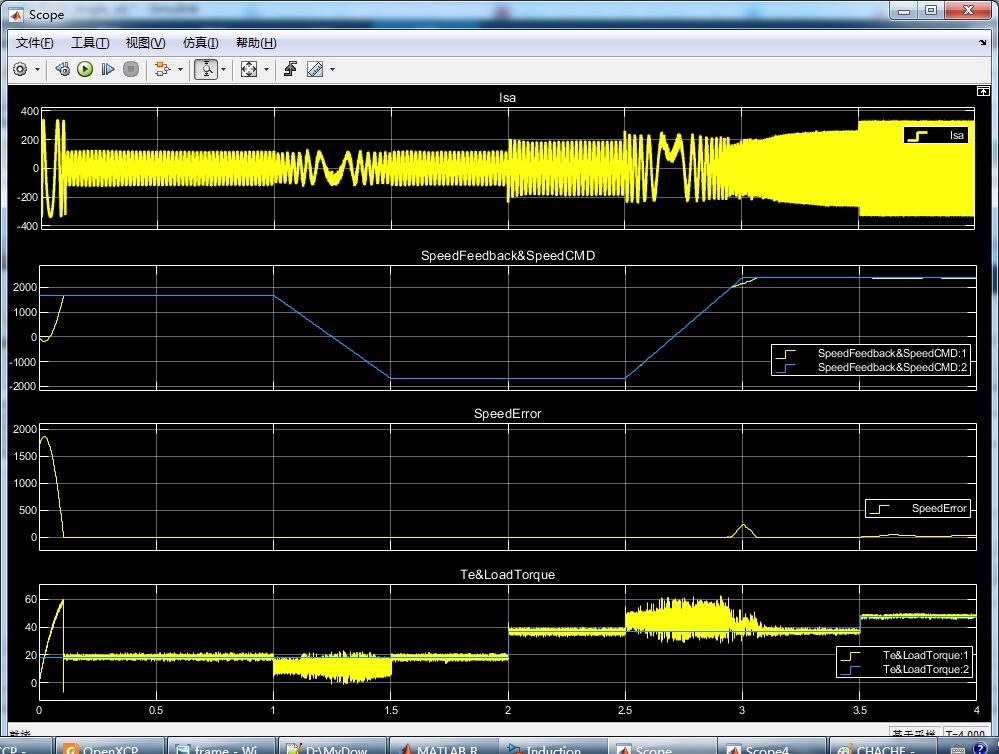
比如在带负载启动工况下,转速环和电流环快速响应,使得电机能快速达到稳定转速,同时限幅环节保证电流不会过大损坏电机。
实用价值与文献分享
这个仿真模型具有较高的实用价值,它基于实际电机参数,模拟了各种真实工况,对于电动叉车的电机控制优化有很大的指导意义。
最后,给大家附赠部分优质异步电机矢量控制相关文献,希望对大家进一步研究有所帮助:
- 《异步电机矢量控制原理与实践》,详细讲解了矢量控制的基本原理与实际应用案例。
- 《基于FOC的三相异步电机高性能控制策略研究》,专注于FOC控制在提高电机性能方面的深入研究。
希望这次分享能让大家对三相异步电机的Simulink仿真以及校企合作项目中的电机控制有更深入的了解。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 18
18 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)