《智慧营房禁区三维透视与越界行为空间级识别系统》——禁区拓扑建模 × 越界判据可解释 × 行为证据链自动生成
《智慧营房禁区三维透视与越界行为空间级识别系统》构建了基于三维空间坐标的透明治理体系。该系统通过禁区拓扑建模、三维空间反演、可解释越界判据等五大模块协同,实现禁区管理从二维监控向三维数据治理的升级。核心创新包括:1) 将禁区表达为可量化空间对象;2) 基于几何关系的可解释判定逻辑;3) 自动生成结构化行为证据链;4) 决策路径全程可追溯。系统定位精度≤30cm,支持跨摄像连续轨迹追踪,并实现判定参
《智慧营房禁区三维透视与越界行为空间级识别系统》
——禁区拓扑建模 × 越界判据可解释 × 行为证据链自动生成
构建空间级透明治理中枢
发布单位:镜像视界(浙江)科技有限公司
版本号:V3.0 军用透明治理版
摘要
在现代智慧营房建设中,禁区管理不仅要求精准识别,更要求判定过程透明、责任链条清晰、审计过程可追溯。
镜像视界构建三维禁区拓扑建模与空间级越界识别系统,通过几何判据可解释模型与自动行为证据链机制,实现:
-
越界识别空间化
-
判定逻辑透明化
-
管理流程数据化
-
决策路径可回溯化
系统不仅解决“是否越界”的问题,更解决“为何判定越界、如何证明越界”的问题。
第一章 建设背景与治理升级需求
智慧营房正在从:
“监控型安全管理”
升级为
“数据化治理与空间级透明管理”。
传统问题:
-
判定依赖人工经验;
-
违规认定存在争议;
-
审计链条不完整;
-
责任追溯缺乏结构化依据。
因此必须构建:
可解释、可回溯、可审计的空间级禁区识别体系。

第二章 系统总体架构(透明化增强版)
智慧营房禁区三维透视与越界行为空间级识别系统采用模块化分层架构设计,在统一空间坐标体系下构建五大核心能力模块,实现从禁区建模到透明治理的完整闭环。
系统由以下五大模块构成:
1️⃣ 禁区拓扑建模
2️⃣ 三维空间反演引擎
3️⃣ 可解释越界判据模型
4️⃣ 行为证据链自动生成系统
5️⃣ 透明化治理与审计引擎
所有模块共享同一三维空间坐标体系与时间同步基准,实现数据逻辑统一、判定逻辑统一与审计逻辑统一。
2.1 统一空间坐标底座
系统以三维空间坐标为基础表达方式,将营区内:
-
禁区结构
-
建筑体量
-
人员轨迹
-
管理行为
-
响应动作
全部映射至统一坐标框架:
P(x,y,z,t)P(x,y,z,t)P(x,y,z,t)
统一坐标体系带来的核心优势包括:
-
消除跨摄像视角误差;
-
消除二维区域判定偏差;
-
实现轨迹连续表达;
-
支持空间级透明可视。
空间底座是整个系统透明化治理能力的基础。
2.2 禁区拓扑建模模块
该模块负责构建营区内所有禁区的空间拓扑结构。
禁区被表达为三维体积单元:
Zone_volume(x,y,z,Level,Attribute)Zone\_volume(x,y,z,Level,Attribute)Zone_volume(x,y,z,Level,Attribute)
支持:
-
核心禁区;
-
缓冲区;
-
动态临时封控区;
-
演训封控区。
禁区之间通过拓扑关系建立层级结构与邻接关系,形成完整的禁区拓扑网络。
透明化增强机制:
-
所有禁区模型具备版本编号;
-
禁区结构变更自动记录;
-
禁区体积参数可审计。
禁区不再是画面区域,而是可量化的空间对象。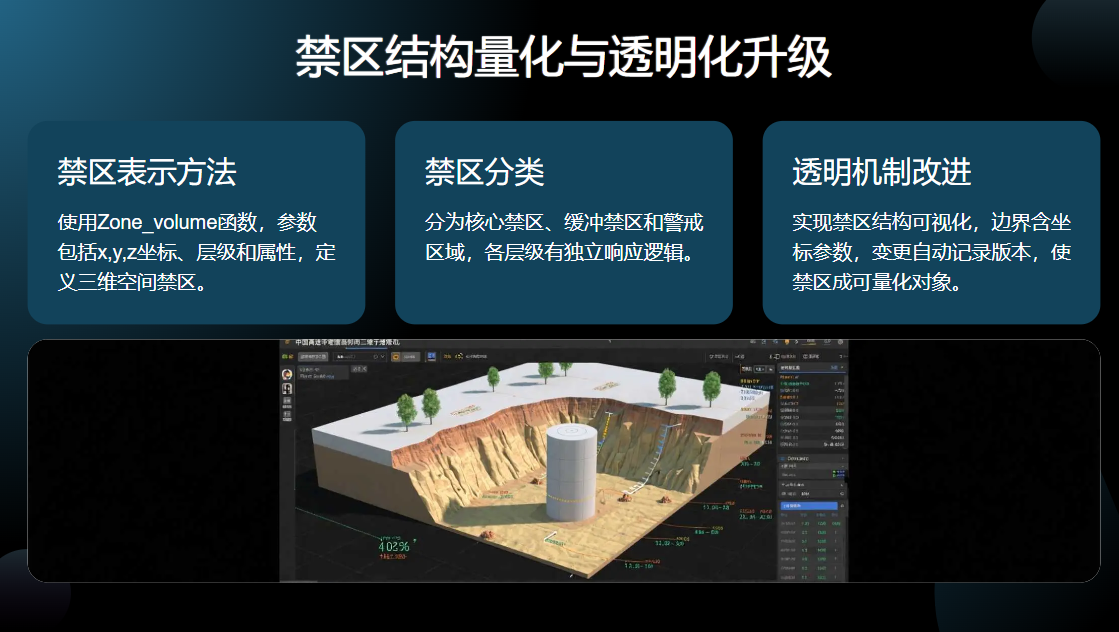
2.3 三维空间反演引擎
系统通过 Pixel2Geo 三维空间反演引擎,将摄像像素坐标映射为真实空间坐标,实现人员与目标的精准定位。
目标统一表达为:
P_target(x,y,z,t)P\_{target}(x,y,z,t)P_target(x,y,z,t)
核心能力包括:
-
高精度内外参联合标定;
-
跨摄像连续锁定;
-
盲区补偿预测;
-
夜间与低光增强支持。
定位精度可控制在 ≤30cm。
透明增强机制:
-
所有坐标数据留存原始记录;
-
拼接算法版本自动标记;
-
轨迹连续性评分可回溯。
2.4 可解释越界判据模型
越界行为不依赖经验判断,而基于几何关系计算。
判定函数:
Cross=f(P_target,Zone_volume)Cross = f(P\_{target}, Zone\_volume)Cross=f(P_target,Zone_volume)
系统输出:
-
最小距离值 dmind_{min}dmin;
-
进入禁区时间 tentert_{enter}tenter;
-
连续停留时长;
-
判定置信度评分 SSS;
-
判据函数版本号。
所有参数自动存储。
透明增强机制:
-
判定逻辑可回放;
-
阈值参数可查询;
-
判据模型具备算法版本标识;
-
每一次判定生成唯一 Algorithm_trace_ID。
实现几何级可解释。
2.5 行为证据链自动生成系统
系统自动生成完整行为链数据结构:
Event_ID={时间轴+三维轨迹+禁区模型版本+判定参数+响应动作+操作日志}Event\_ID = \{ 时间轴 + 三维轨迹 + 禁区模型版本 + 判定参数 + 响应动作 + 操作日志 \}Event_ID={时间轴+三维轨迹+禁区模型版本+判定参数+响应动作+操作日志}
证据链具备:
-
自动编号;
-
数据加密;
-
不可篡改记录;
-
审计访问留痕。
实现从“录像取证”升级为“空间数据证据链”。
2.6 透明化治理与审计引擎
该模块是系统区别于传统安防系统的核心增强能力。
其功能包括:
-
判定逻辑可解释化;
-
决策路径可回溯;
-
响应行为全流程记录;
-
分级访问与权限控制;
-
审计报告自动生成。
透明不等于公开敏感信息,而是在授权范围内确保:
-
判定标准一致;
-
责任链条清晰;
-
管理流程可复核。
系统构建:
Decision_chain_trace
对每一次管理行为进行空间级记录。
2.7 模块协同机制
五大模块通过统一数据接口与时间同步机制协同运行。
流程如下:
-
空间反演引擎生成轨迹;
-
禁区拓扑模型提供空间边界;
-
判据模型计算越界;
-
证据链系统记录行为;
-
审计引擎生成透明管理记录。
形成:
识别 → 判定 → 响应 → 记录 → 审计
的闭环结构。
2.8 架构升级意义
通过五大模块协同,系统实现:
-
禁区表达三维化;
-
判定逻辑几何化;
-
轨迹数据连续化;
-
证据链自动化;
-
管理流程透明化。
营区禁区管理由“画面监控逻辑”升级为:
统一空间坐标驱动的透明治理体系。
第三章 禁区拓扑建模与空间透明表达
禁区以三维体积表达:
Zone_volume(x,y,z,层级,属性)
禁区分为:
-
核心禁区
-
缓冲禁区
-
警戒区域
每一层级具备独立响应逻辑。
透明机制增强:
-
所有禁区结构可视化展示;
-
所有体积边界具备坐标参数;
-
禁区变更自动记录版本号。
禁区结构不再抽象,而是可量化空间对象。
第四章 三维空间反演与轨迹可视透明
三维空间反演是智慧营房禁区识别体系的基础能力,也是透明治理机制的核心支撑。系统通过统一空间坐标体系,将所有人员与目标映射为可计算、可追溯、可验证的三维空间对象。
4.1 三维空间反演模型
系统基于 Pixel2Geo 三维空间反演引擎,将摄像画面中的像素坐标 (u,v)(u,v)(u,v) 转换为真实空间坐标 (x,y,z)(x,y,z)(x,y,z)。
目标统一表达为:
Ptarget(x,y,z,t)P_{target}(x,y,z,t)Ptarget(x,y,z,t)
其中:
-
x,y,zx,y,zx,y,z 为空间坐标;
-
ttt 为高精度时间戳;
-
所有坐标均基于统一营区坐标基准。
当目标出现在多摄像视域中时,通过多视角三角交汇模型计算真实空间位置:
P(x,y,z)=argmin∑∣∣Ri⋅Ki−1(u,v)−交汇点∣∣P(x,y,z) = \arg\min \sum ||R_i \cdot K_i^{-1}(u,v) - 交汇点||P(x,y,z)=argmin∑∣∣Ri⋅Ki−1(u,v)−交汇点∣∣
实现厘米级空间定位精度。
4.2 连续三维轨迹生成机制
系统对每一帧空间坐标进行时间序列融合,生成连续轨迹:
Trajectory={Pt1,Pt2,Pt3,...Ptn}Trajectory = \{P_{t1}, P_{t2}, P_{t3}, ... P_{tn}\}Trajectory={Pt1,Pt2,Pt3,...Ptn}
轨迹具备以下特性:
-
跨摄像连续性;
-
无视域跳变;
-
支持盲区预测补偿;
-
具备速度与加速度计算能力。
轨迹不再是画面路径,而是真实空间路径。
4.3 跨摄像拼接逻辑透明记录
在多摄像环境中,轨迹连续性依赖拼接算法完成身份保持。
系统采用三层拼接策略:
1️⃣ 空间连续性匹配
2️⃣ 速度向量一致性校验
3️⃣ 行为特征一致性约束
拼接函数示意:
Min∑∣∣Pt−Pt−1∣∣+λ⋅速度差+θ⋅方向差Min \sum ||P_t - P_{t-1}|| + \lambda·速度差 + \theta·方向差Min∑∣∣Pt−Pt−1∣∣+λ⋅速度差+θ⋅方向差
透明增强机制包括:
-
每次拼接生成拼接评分 S;
-
拼接阈值自动记录;
-
拼接逻辑版本编号标记;
-
生成 Track_link_trace_ID。
确保轨迹连续性计算可复核。
4.4 轨迹数据透明留存机制
为实现透明化治理,系统对轨迹数据进行结构化留存:
每一条轨迹包含:
-
原始空间坐标序列;
-
时间戳序列;
-
摄像源标识;
-
拼接评分;
-
算法版本号;
-
数据生成版本号。
形成标准轨迹数据结构:
Trajectory_ID={坐标序列+时间序列+算法标识+拼接记录}Trajectory\_ID = \{坐标序列 + 时间序列 + 算法标识 + 拼接记录\}Trajectory_ID={坐标序列+时间序列+算法标识+拼接记录}
实现轨迹级数据可回溯。
4.5 数据版本自动标记机制
系统为所有数据生成自动版本号:
-
坐标生成版本;
-
拼接算法版本;
-
误差补偿模型版本;
-
时间同步版本。
任何轨迹回放均可恢复当时使用的算法状态。
确保:
判定结果可还原,历史逻辑可验证。
4.6 时间序列可追溯性保障
系统采用统一时间同步机制,确保所有摄像源与计算节点时间一致。
轨迹数据具备:
-
毫秒级时间精度;
-
跨节点时间对齐;
-
历史版本保留。
任何越界事件均可通过时间轴回放,重现完整空间过程。
4.7 可视透明表达能力
在数字孪生平台中,轨迹支持:
-
三维路径可视化;
-
速度向量叠加;
-
禁区体积叠加显示;
-
判定触发点高亮;
-
风险等级动态展示。
实现:
“空间逻辑可见化”。
管理人员不仅看到画面,更看到空间几何关系。
4.8 透明机制综合价值
通过三维空间反演与轨迹透明留存机制,系统实现:
1️⃣ 空间定位真实化;
2️⃣ 轨迹表达连续化;
3️⃣ 拼接逻辑可解释化;
4️⃣ 数据版本可还原化;
5️⃣ 管理过程可审计化。
营区治理不再依赖画面截图,而基于空间级数据链条。
4.9 本章升级意义
三维空间反演不仅是技术能力,更是透明化治理的根基。
它确保:
-
每一次越界判定建立在真实空间坐标之上;
-
每一条轨迹具有完整可回溯记录;
-
每一个管理动作有空间数据支撑。
为后续越界判据与证据链自动生成提供坚实基础。
第五章 可解释越界判据体系(核心透明模块)
越界判定函数:
Cross = f(P_target, Zone_volume)
系统输出:
-
最小距离值 d_min
-
进入体积时间 t_enter
-
连续停留时长
-
判定置信度 S
-
判据函数版本号
透明升级点:
-
判定逻辑基于几何关系;
-
判定参数自动记录;
-
算法版本可回溯。
形成:
Algorithm_trace_ID
确保判定逻辑透明可查。
第六章 行为证据链自动生成系统
系统自动生成结构化证据链:
Event_ID =
{
时间轴 +
三维轨迹 +
禁区模型版本 +
判定函数参数 +
响应动作记录 +
操作者日志
}
透明强化机制:
-
所有响应行为自动留痕;
-
所有日志加密存储;
-
审计访问自动记录。
实现从录像留存到空间数据留存。
第七章 分级响应与决策链透明
越界触发后:
一级:声光提示
二级:门禁联动
三级:指挥中心联动
透明机制嵌入:
-
响应时间自动记录;
-
执行人身份留痕;
-
操作流程完整存档。
形成:
Decision_chain_trace
决策路径可完整复盘。
第八章 数字孪生透明治理平台
数字孪生透明治理平台是智慧营房禁区识别系统的可视化中枢与决策中枢。该平台将三维空间反演数据、禁区拓扑模型、越界判据结果与行为证据链统一融合,实现空间级治理逻辑的实时展示与全过程回溯。
平台不是单纯的三维展示系统,而是:
集空间表达、判定可解释、行为回溯与决策透明于一体的治理中枢。
8.1 三维禁区体积实时展示
平台将所有禁区表达为真实三维体积模型:
Zone_volume(x,y,z,Level,Status)Zone\_volume(x,y,z,Level,Status)Zone_volume(x,y,z,Level,Status)
支持实时显示:
-
核心禁区
-
缓冲禁区
-
动态封控区
-
临时演训区域
禁区体积可根据状态变化进行动态标色:
-
正常状态;
-
警戒状态;
-
越界触发状态;
-
升级封控状态。
禁区结构可视透明,边界不再抽象。
8.2 越界点空间级高亮标注
当越界判定触发时,系统在三维模型中自动生成:
-
越界触发点;
-
进入体积路径;
-
最小距离位置;
-
停留时间标识。
越界行为可精确定位至空间坐标点,而非画面框选区域。
同时支持:
-
多事件叠加显示;
-
历史事件重叠分析;
-
趋势热点统计。
8.3 风险等级可视分布机制
平台基于风险评估函数生成空间风险热力图:
Risk(x,y,z,t)Risk(x,y,z,t)Risk(x,y,z,t)
支持:
-
实时风险强度渲染;
-
高风险区域动态闪烁提示;
-
风险等级分层过滤;
-
趋势变化曲线展示。
风险由抽象判断转化为可视化空间分布。
8.4 行为轨迹时间轴回放系统
系统支持完整时间轴回放功能:
-
三维轨迹动态播放;
-
速度向量叠加显示;
-
越界判定触发时间点标记;
-
响应动作同步展示。
回放过程可切换:
-
原始轨迹模式;
-
判定叠加模式;
-
风险等级模式;
-
决策链展示模式。
实现:
“全过程空间复盘”。
8.5 判定逻辑参数叠加显示
为实现透明化治理,平台支持判定逻辑参数叠加展示,包括:
-
判据函数版本号;
-
最小距离值;
-
判定阈值;
-
置信度评分;
-
算法版本标识;
-
数据生成版本号。
用户可在三维界面中直接查看:
-
该次越界为何被判定;
-
判定所依据的空间几何关系;
-
判定是否符合当时规则。
实现“逻辑可视化”。
8.6 决策链透明展示机制
平台同步展示决策链条:
-
越界识别时间;
-
判定生成时间;
-
响应触发时间;
-
响应执行人;
-
处置结果状态。
形成完整 Decision_chain_trace。
管理行为从“口头指令”升级为“空间级数据链条”。
8.7 审计模式与分级透明控制
平台支持分级透明展示模式:
-
指挥级视图;
-
审计级视图;
-
运维级视图。
敏感数据采用:
-
分级授权访问;
-
数据脱敏处理;
-
审计访问记录留痕。
实现:
对内透明,对外受控。
8.8 平台综合治理能力
通过数字孪生透明治理平台,系统实现:
1️⃣ 禁区结构透明化;
2️⃣ 判定逻辑可解释化;
3️⃣ 行为轨迹可回放化;
4️⃣ 决策路径可追溯化;
5️⃣ 管理流程数据化。
营区治理从“录像回看”升级为“空间数据复盘”。
8.9 本章战略意义
数字孪生透明治理平台使管理逻辑从隐性判断转变为显性空间关系表达。
实现:
“管理逻辑可见化”。
这是智慧营房从安全系统升级为治理系统的关键一步。
第九章 透明治理综合价值
智慧营房禁区三维透视与越界行为空间级识别系统的建设,不仅实现技术能力提升,更实现治理模式结构性升级。系统通过空间建模与透明化机制融合,完成五大治理跃迁,推动营区管理进入空间数据治理阶段。
9.1 判定几何化 —— 从经验判断到空间关系计算
传统禁区管理依赖:
-
人工画面观察;
-
主观经验判断;
-
区域框选逻辑。
系统通过三维禁区体积模型与空间坐标反演,实现判定基于真实几何关系。
越界判定函数:
Cross=f(Ptarget,Zonevolume)Cross = f(P_{target}, Zone_{volume})Cross=f(Ptarget,Zonevolume)
所有判定建立在空间坐标与体积交集关系之上,而非画面区域遮挡判断。
治理价值:
-
判定标准统一;
-
减少人为误判;
-
消除区域抽象模糊性;
-
支持复杂立体结构禁区表达。
禁区管理从“二维感知”升级为“三维计算”。
9.2 逻辑可解释化 —— 从黑箱结果到透明判据
传统系统仅给出:
“是否越界”结论。
本系统输出:
-
最小空间距离;
-
进入体积时间;
-
连续停留时长;
-
判定置信度评分;
-
判据算法版本号。
每一次判定均具备:
Algorithm_trace_ID
任何结果均可回溯至:
-
使用的判据函数;
-
使用的阈值参数;
-
使用的算法版本。
治理价值:
-
判定过程可验证;
-
判定逻辑可审查;
-
管理标准可复现;
-
技术决策可解释。
营区治理不再依赖“系统说了算”,而依赖“空间逻辑可证明”。
9.3 责任链数据化 —— 从口头处置到结构化记录
系统为每次越界事件自动生成结构化证据链:
Event_ID={轨迹数据+禁区模型版本+判定参数+响应记录+操作日志}Event\_ID = \{ 轨迹数据 + 禁区模型版本 + 判定参数 + 响应记录 + 操作日志 \}Event_ID={轨迹数据+禁区模型版本+判定参数+响应记录+操作日志}
所有处置动作自动编号,生成:
Decision_chain_trace
治理价值:
-
责任归属清晰;
-
处置行为留痕;
-
管理动作可复核;
-
审计依据结构化。
实现从“录像取证”到“空间数据证据链”的升级。
9.4 审计流程自动化 —— 从人工汇报到系统生成
系统支持自动生成:
-
越界事件报告;
-
风险等级分析;
-
处置效率评估;
-
管理合规报告。
所有报告基于:
-
原始空间数据;
-
判据函数记录;
-
响应时间链条。
治理价值:
-
降低人工统计误差;
-
提升审计效率;
-
形成持续治理改进依据;
-
支持上级单位核查。
审计从“事后整理”升级为“实时生成”。
9.5 决策路径可追溯化 —— 从即时响应到可复盘治理
系统为每一次管理行为构建完整决策路径:
识别时间 → 判定生成 → 响应触发 → 执行记录 → 处置结果。
所有数据均可通过时间轴回放与三维复盘重现。
治理价值:
-
决策透明;
-
操作路径完整;
-
管理责任清晰;
-
争议可复盘解决。
营区管理由“即时判断型”升级为“可复盘型”。
9.6 透明治理能力矩阵
系统最终构建五维透明治理能力矩阵:
| 能力维度 | 升级结果 |
|---|---|
| 空间表达 | 三维体积化 |
| 判定逻辑 | 几何可解释 |
| 数据留存 | 轨迹结构化 |
| 审计机制 | 自动化生成 |
| 决策路径 | 全流程可追溯 |
形成:
空间透明 × 判定透明 × 责任透明 × 审计透明 × 决策透明
的完整治理体系。
9.7 本章战略定位
透明治理综合价值的核心在于:
将营区禁区管理从“人工经验判断”
升级为
“统一空间坐标驱动的空间数据治理体系”。
这是智慧营房建设从技术升级走向制度升级的关键跨越。
第十章 战略意义(升级版)
智慧营房建设的核心不再只是防控能力,而是:
可解释、可验证、可审计的透明治理能力。
镜像视界通过:
-
禁区三维拓扑建模;
-
空间级越界判据模型;
-
自动化行为证据链;
-
决策链透明记录机制;
构建了:
营区空间级透明治理中枢。
实现从:
“视频监控系统”
升级为
“空间级透明化安全治理引擎”。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 24
24 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)