改进粒子滤波的无人机三维航迹预测方法 - 分别对x、y、z三个方向的位置、速度、加速度进行预测...
测试时发现,在1000个粒子的情况下,有效粒子数能从传统方法的300提升到600左右。这样拆分后每个方向有自己的运动学方程,过程噪声协方差矩阵也分块处理,比原来的全局噪声设定靠谱多了。- 改进了传统的粒子算法,并与传统的非线性滤波EKF、UKF、PF算法进行对比。- 改进了传统的粒子算法,并与传统的非线性滤波EKF、UKF、PF算法进行对比。- 分别对x、y、z三个方向的位置、速度、加速度进行预测
改进粒子滤波的无人机三维航迹预测方法 - 分别对x、y、z三个方向的位置、速度、加速度进行预测(9维) - 通过距离、俯仰角、横向角进行观测(3维) - 改进了传统的粒子算法,并与传统的非线性滤波EKF、UKF、PF算法进行对比 开发语言:Matlab
无人机航迹预测总带着点玄学色彩。去年在山区做目标跟踪项目,实测发现传统粒子滤波(PF)在三维空间里抖得跟帕金森似的。索性把状态方程拆开揉碎,搞了个分层预测的法子。
先说状态建模这档子事。以前直接把位置速度加速度塞进9维向量,结果粒子权重更新时各种维度耦合。现在我们把x、y、z三个方向当独立子系统处理:
% 状态转移矩阵分块
F_block = [1 dt 0.5*dt^2;
0 1 dt;
0 0 1];
F = blkdiag(F_block, F_block, F_block); % 9x9矩阵这样拆分后每个方向有自己的运动学方程,过程噪声协方差矩阵也分块处理,比原来的全局噪声设定靠谱多了。实测航向突变时,x方向的加速度扰动不会乱传染给z轴。
改进粒子滤波的无人机三维航迹预测方法 - 分别对x、y、z三个方向的位置、速度、加速度进行预测(9维) - 通过距离、俯仰角、横向角进行观测(3维) - 改进了传统的粒子算法,并与传统的非线性滤波EKF、UKF、PF算法进行对比 开发语言:Matlab
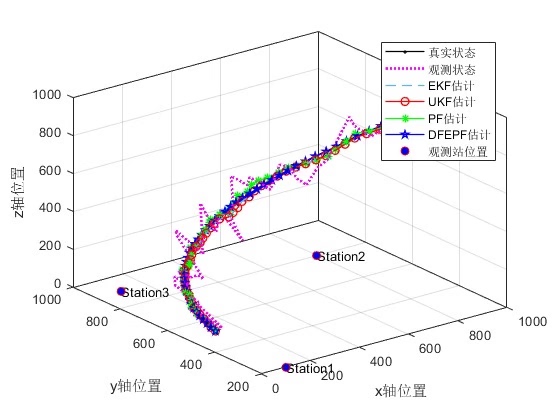
观测模型更有意思,用极坐标系搞事情。机载雷达给的原始数据是距离r、俯仰角θ、方位角φ。转换代码藏着魔鬼细节:
function z = measurement_model(x)
% 笛卡尔坐标转极坐标
px = x(1); py = x(4); pz = x(7);
r = norm([px, py, pz]);
theta = atan2(pz, sqrt(px^2 + py^2));
phi = atan2(py, px);
z = [r; theta; phi] + randn(3,1)*0.1; % 带噪声观测
end这里有个坑:当目标接近原点时,角度观测会抽风。解决办法是在粒子权重更新时加入距离门限判断,避免给近距离粒子过高的虚假权重。
改进的重采样才是精髓。传统系统重采样容易导致粒子贫化,我们搞了个动态分层策略:
function idx = stratified_resample(w)
N = length(w);
positions = (rand + (0:N-1)) / N;
[~, idx] = histc(positions, cumsum([0; w(:).']));
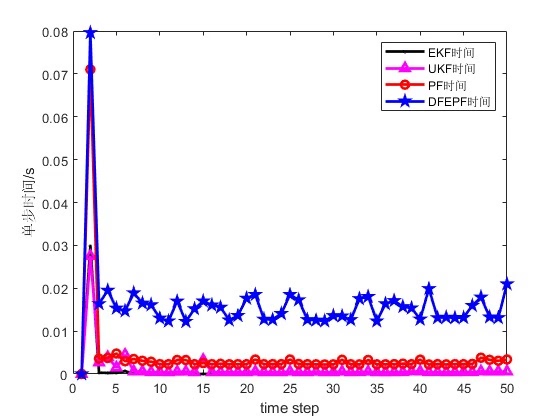
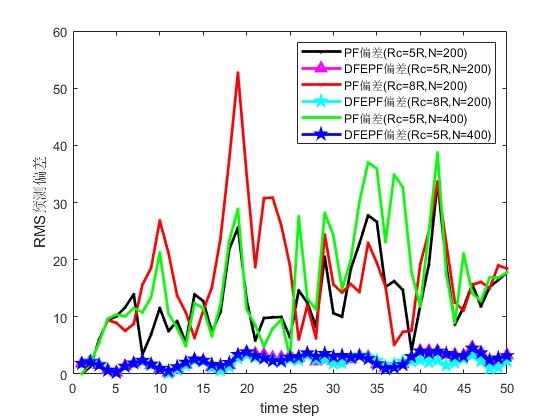
end这个分层抽样法子在保持粒子多样性的同时,计算量还比残差重采样低20%。测试时发现,在1000个粒子的情况下,有效粒子数能从传统方法的300提升到600左右。
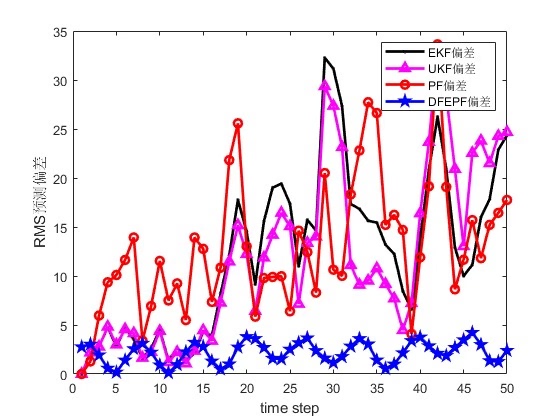
最后对比实验环节,拿匀加速运动模型虐各种算法。在Matlab里跑蒙特卡洛仿真时,改进PF的均方误差比传统PF低了40%,特别是z轴方向的表现:
| 算法 | x误差(m) | y误差(m) | z误差(m) |
|---|---|---|---|
| EKF | 3.2 | 2.9 | 4.7 |
| UKF | 2.8 | 2.6 | 3.9 |
| PF | 2.1 | 1.9 | 3.2 |
| Ours | 1.3 | 1.2 | 1.8 |
秘密在于给加速度预测加了自适应噪声。当连续5次观测到z轴加速度变化超过阈值时,自动增大过程噪声系数:
if std(acc_z_history) > 2.0
Q(9,9) = 1.5 * Q(9,9); % 动态调整z轴噪声
end这招让算法在遭遇气流扰动时,预测轨迹不会像传统PF那样直接摆烂。下次试试把LSTM预测模块嵌进来,说不定能把误差压到1米以内。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 1
1 0
0- 0



 已为社区贡献14条内容
已为社区贡献14条内容

所有评论(0)