基于 S7 - 1200 PLC 的智能机械手程序开发之旅
基于s7-1200PLC的智能机械手程序 包含:程序,HMI触摸屏动态画面,图纸,设计文档。 博图v16
在自动化领域,基于 S7 - 1200 PLC 的智能机械手应用愈发广泛。今天就来和大家唠唠基于博图 V16 进行智能机械手程序相关开发的那些事儿,这里面包括程序、HMI 触摸屏动态画面、图纸以及设计文档。
程序部分
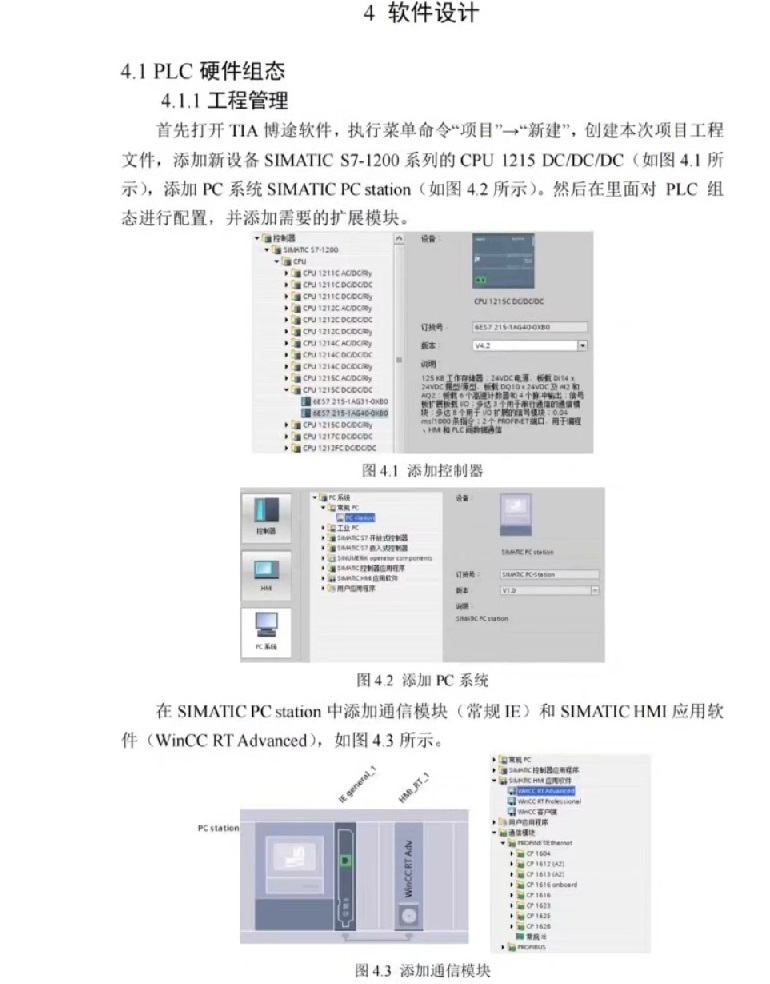
首先看看 PLC 程序。在博图 V16 环境下创建 S7 - 1200 项目后,我们就可以着手编写逻辑。比如,机械手的动作控制,常见的有抓取、放下、移动等操作。
// 定义一些用于控制机械手动作的变量
VAR
Grab : BOOL; // 抓取动作标志
Release : BOOL; // 放下动作标志
MoveX : INT; // 沿 X 轴移动距离
MoveY : INT; // 沿 Y 轴移动距离
END_VAR
// 主程序部分
PROGRAM Main
// 当接收到抓取信号
IF StartGrab THEN
Grab := TRUE;
// 这里假设机械手有对应的功能块来执行抓取动作
FB_Grab();
END_IF
// 当抓取完成,满足放下条件
IF Grab AND ReleaseCondition THEN
Release := TRUE;
FB_Release();
Grab := FALSE;
END_IF
// 根据设定值控制机械手沿 X 轴移动
IF MoveX_Set THEN
MoveX := MoveX_Value;
FB_MoveX(MoveX);
END_IF
// 根据设定值控制机械手沿 Y 轴移动
IF MoveY_Set THEN
MoveY := MoveY_Value;
FB_MoveY(MoveY);
END_IF
END_PROGRAM这段代码通过定义变量来控制机械手的各种动作。Grab 和 Release 用于标志抓取和放下动作,MoveX 和 MoveY 控制沿不同轴的移动。在主程序中,根据不同的条件调用相应的功能块来执行实际动作。例如,当 StartGrab 信号到来,就置位 Grab 并调用抓取功能块 FB_Grab() 。
HMI 触摸屏动态画面
HMI 触摸屏为操作人员提供了与智能机械手交互的界面。在博图 V16 的 HMI 设计界面,我们可以创建各种动态元素。比如,添加按钮来触发机械手的动作。
首先,拖入一个按钮元件,在属性设置中,将其按下事件关联到 PLC 程序中的 StartGrab 变量。这样,操作人员在触摸屏上按下这个按钮,就相当于给 PLC 发送了抓取的信号。
对于显示部分,我们可以添加一些数值显示框,用于显示机械手当前的位置信息。例如,绑定 MoveX 和 MoveY 变量到对应的显示框,操作人员就能实时看到机械手在 X 和 Y 轴的位置。
<!-- 这是一个简单的 HMI 画面布局示例代码片段 -->
<Screen Name="MainScreen">
<Button Name="btnGrab" Text="抓取" OnPressed="SetBit(StartGrab)"/>
<Textbox Name="txtXPos" Text="{MoveX}"/>
<Textbox Name="txtYPos" Text="{MoveY}"/>
</Screen>这里通过简单的 XML 代码展示了 HMI 画面的部分布局,按钮按下事件调用 SetBit 函数来置位 PLC 中的 StartGrab 变量,文本框通过绑定变量来显示实时位置。
图纸
设计智能机械手少不了图纸。机械结构图纸要详细绘制机械手的各个部件,从机械臂的关节连接到末端执行器的设计。电气图纸则要清晰展示 PLC、传感器、电机等设备之间的连接关系。
基于s7-1200PLC的智能机械手程序 包含:程序,HMI触摸屏动态画面,图纸,设计文档。 博图v16
以电气图纸为例,要标明 S7 - 1200 PLC 的各个输入输出端口与传感器、执行机构的连线。比如,接近传感器连接到 PLC 的输入端口,用于检测物体是否到位,电机驱动器连接到 PLC 的输出端口,控制机械手的运动。
设计文档
设计文档是整个项目的重要组成部分。它要涵盖项目的需求分析,说明为什么要设计这样一个智能机械手,预期达到什么样的生产效率等。

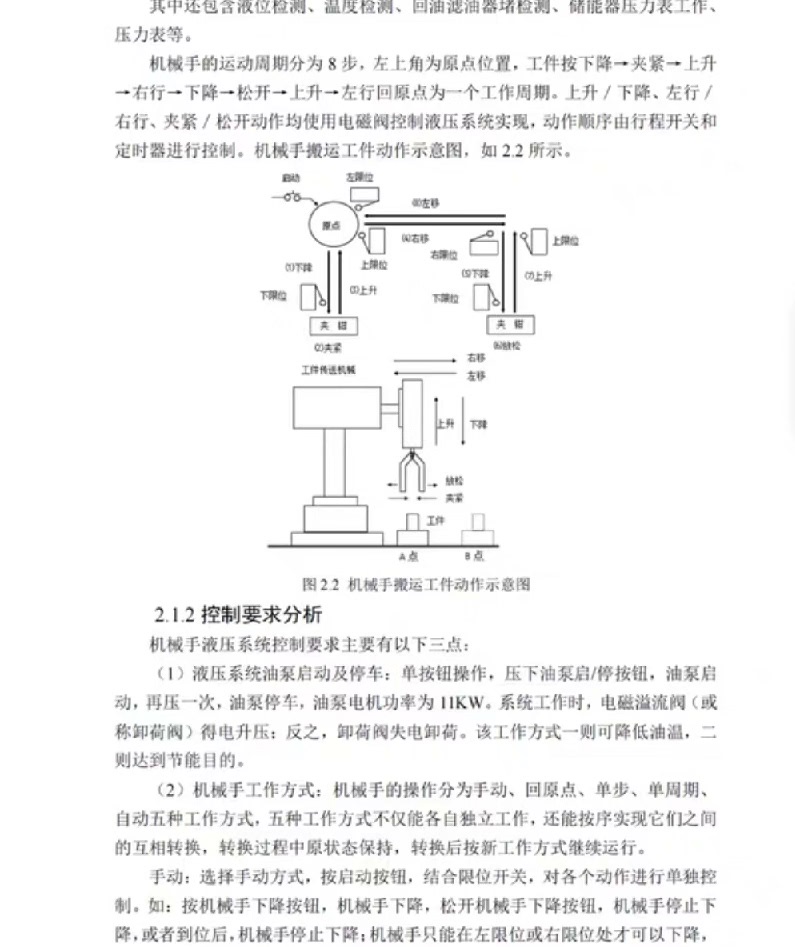
在功能设计部分,详细描述机械手的各种动作流程,就像前面程序中体现的抓取、放下、移动等操作是如何相互配合的。
还有硬件选型部分,解释为什么选择 S7 - 1200 PLC,以及其他设备如电机、传感器的选型依据。
通过程序、HMI 触摸屏动态画面、图纸以及设计文档的协同,基于 S7 - 1200 PLC 的智能机械手才能高效稳定地运行,为自动化生产带来助力。希望今天分享的这些内容能给大家在相关项目开发中带来一些启发。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 10
10 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)