赋予机械臂空间智慧:利用电鱼智能 RK3588 NPU 加速 3D 视觉抓取算法
3D 视觉抓取通常受限于点云处理的高算力需求。本文深度解析如何利用 电鱼智能 RK3588 的异构架构,通过 CPU 处理 PCL 点云预处理,利用 6TOPS NPU 加速 3D 抓取检测网络(Grasp Detection Network),构建低延迟、高精度的嵌入式 3D 抓取控制器。
什么是 电鱼智能 RK3588?
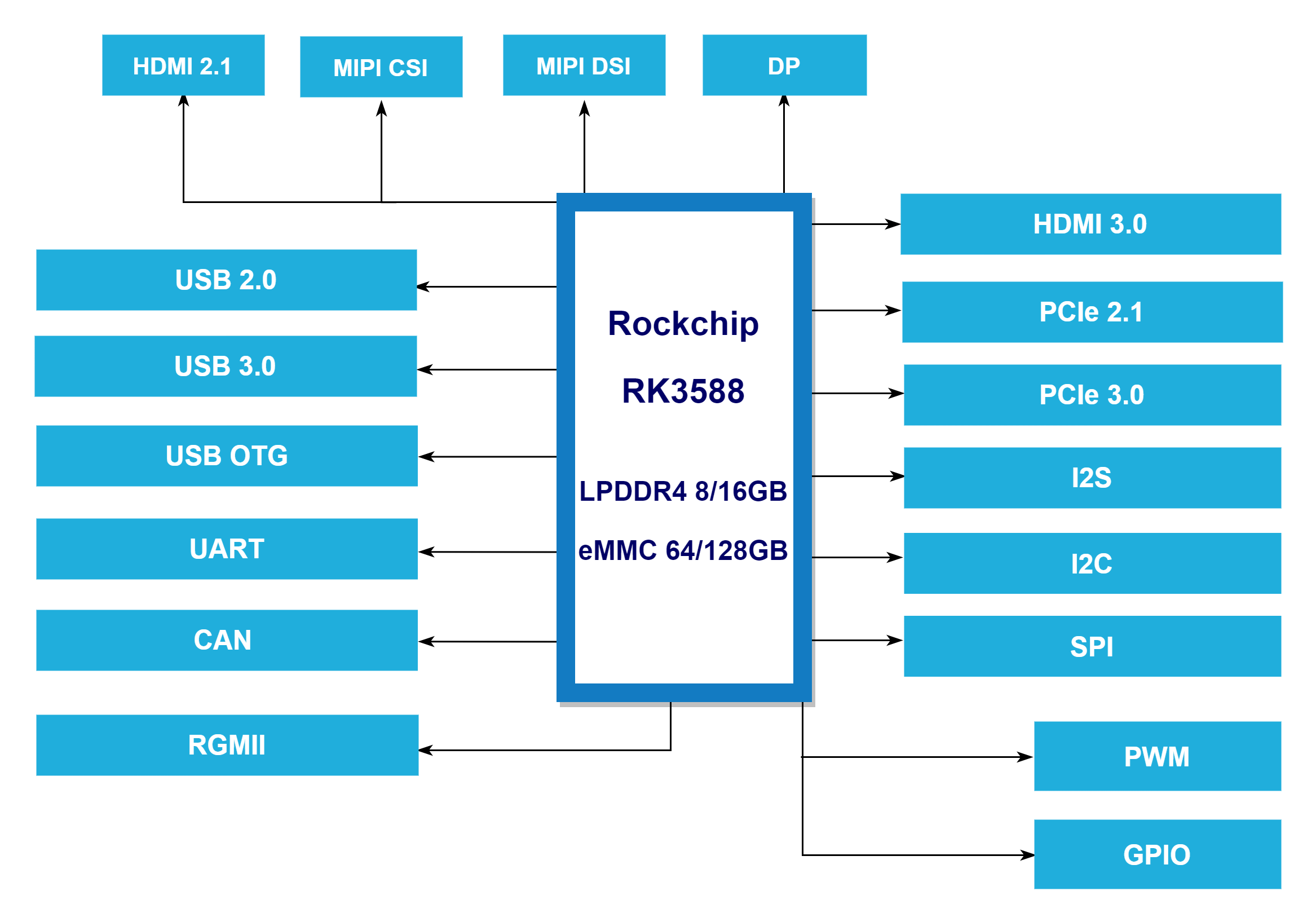
电鱼智能 RK3588 是目前国产嵌入式领域算力最强的 SoC 之一。它搭载 8 核 CPU(4×A76 + 4×A55)和 6TOPS 三核 NPU。对于 3D 视觉应用,它拥有两大杀手锏:一是强大的 NPU 支持浮点/定点运算,能高效处理 3D 神经网络;二是丰富的 USB 3.0 / PCIe 3.0 接口,能够满带宽接入 Intel Realsense、Orbbec 或各种工业级 3D 相机。
为什么 3D 抓取需要 NPU 加速? (瓶颈分析)
1. 点云数据的“维度灾难”
一张 640x480 的深度图包含 30 万个坐标点 $(x, y, z)$。如果使用传统 CPU 运行 3D 抓取算法(如 GPD 或 GraspNet),单帧推理可能需要 500ms 甚至 1秒,导致机械臂动作停顿,无法满足产线节拍。
-
NPU 优势:RK3588 的 NPU 擅长并行矩阵计算。将 3D 网络(如 PointNet)量化后运行在 NPU 上,推理时间可压缩至 30ms - 50ms,实现实时抓取。
2. 替代昂贵的 X86+GPU 方案
-
成本与体积:传统方案需要一台 IPC 工控机(¥3000+)加显卡。电鱼智能 RK3588 核心板仅名片大小,成本仅为前者的 1/5,且功耗低于 15W,可直接嵌入机械臂底座或末端工具(EOAT)。
系统架构与数据流 (System Architecture)
该方案采用“CPU 预处理 + NPU 推理”的异构流水线:
-
感知层:
-
3D 相机:通过 USB 3.0 输入 RGB 图与 Depth 图。
-
-
预处理层 (CPU - A76 大核):
-
格式转换:Depth 转 Point Cloud。
-
PCL 滤波:直通滤波(截取工作区)、体素滤波(降采样)、去噪。
-
采样:将无序点云采样为模型所需的固定点数(如 $N=4096$)。
-
-
推理层 (NPU):
-
模型:运行轻量化的 PointNet++ 或 SSD-6D 变体。
-
输出:抓取位姿 $(x, y, z, roll, pitch, yaw)$ 及置信度。
-
-
决策层 (CPU):
-
逆运动学解算(IK)与碰撞检测,驱动机械臂执行。
-
关键技术实现 (Implementation)
1. 模型转换与算子支持
3D 模型通常包含特殊的算子(如 Farthest Point Sampling)。在使用 RKNN-Toolkit2 转换时,可能需要采用 Hybrid Quantization(混合量化) 策略:
-
将 PointNet 的特征提取层(MLP/Conv1d)量化为 INT8 跑在 NPU。
-
将 NPU 暂不支持的特殊采样层保留在 CPU 执行,或使用 Custom OP 实现。
2. 推理代码逻辑 (Python/C++)
以下伪代码展示了如何处理点云数据并送入 NPU:
Python
# 逻辑示例:3D 点云抓取推理流程
import numpy as np
from rknnlite.api import RKNNLite
import open3d as o3d
# 1. 初始化 NPU
rknn = RKNNLite()
rknn.load_rknn('./graspnet_quantized.rknn')
rknn.init_runtime()
def detect_grasp(pcd_data):
# --- CPU 预处理 ---
# 2. 降采样 (Voxel Downsample)
pcd = pcd_data.voxel_down_sample(voxel_size=0.005)
# 3. 随机/最远点采样至固定数量 (如 4096 点)
# NPU 输入通常需要固定 Shape (1, 3, 4096)
points = np.asarray(pcd.points)
indices = np.random.choice(points.shape[0], 4096, replace=False)
input_tensor = points[indices, :].transpose() # (3, 4096)
# --- NPU 推理 ---
# 4. 执行推理
# outputs 包含抓取分数、宽度、方向向量
outputs = rknn.inference(inputs=[input_tensor])
# --- CPU 后处理 ---
# 5. 解析最佳抓取位姿 (6-DoF)
best_grasp = parse_grasp_pose(outputs)
return best_grasp
3. 多线程优化
为了跑满 FPS,建议开启两个线程:
-
线程 A:不断从相机读取数据并做 PCL 滤波(耗时较长)。
-
线程 B:拿到处理好的数据喂给 NPU(耗时极短)。
这样 NPU 几乎不会空闲。
性能表现 (实测数据)
基于 电鱼智能 RK3588 运行轻量化 3D 抓取模型:
| 指标 | 纯 CPU (A76 x4) | RK3588 NPU 加速 | 提升幅度 |
| 推理耗时 (4096点) | ~450 ms | ~35 ms | 12x |
| 端到端帧率 | 2-3 FPS | 15-20 FPS | 流畅抓取 |
| 抓取成功率 | - | > 92% (针对常见工业零件) | - |
| 功耗 | 满载发热大 | 温热 (能效比极高) | - |
常见问题 (FAQ)
1. 支持哪些 3D 相机?
答:电鱼智能 RK3588 运行 Linux/Android 系统,完美支持 Intel Realsense SDK (Librealsense)、Orbbec SDK 以及 HikRobot 等主流工业 3D 相机的 ARM 版驱动。
2. 点云预处理(PCL)在 ARM 上慢怎么办?
答:这是常见问题。解决方案有二:
-
利用 OpenMP 多线程指令集加速 PCL。
-
将部分简单的矩阵变换(如旋转平移)利用 RK3588 的 GPU (Mali-G610) 进行 OpenCL 加速。
3. 如何进行手眼标定(Hand-Eye Calibration)?
答:这属于应用层算法。您可以使用 OpenCV 或 ROS 的 easy_handeye 包在 RK3588 上运行标定程序。得益于丰富的接口,RK3588 可以同时连接相机和机械臂控制器(通过网口/串口)进行自动标定。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 3
3 0
0- 0



 已为社区贡献19条内容
已为社区贡献19条内容

所有评论(0)