福特汽车主观评价规范:性能开发的宝藏指南
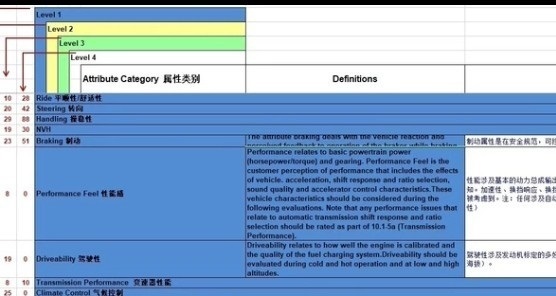
福特汽车主观评价规范,性能开发参考,英文原版直译,评价条目、规则描述非常细致 包含平顺舒适性,转向,操稳,NVH,制动等
最近研究了福特汽车主观评价规范,这可是性能开发相当重要的参考资料,而且还是英文原版直译过来的,里面对评价条目和规则描述那叫一个细致入微,简直打开了新世界的大门。今天就来和大家唠唠这里面的门道。
平顺舒适性:驾乘体验的灵魂
平顺舒适性是考量一辆车优劣的关键指标之一。在福特的评价规范里,对这部分从起步、换挡、行驶过程中的振动等多方面都有详细要求。
咱就拿车辆起步来说,在代码层面,假设车辆的动力控制系统用的是类似下面简单的逻辑(当然实际代码会复杂得多):
def start_engine():
engine_speed = 0
if fuel_level > 0 and battery_voltage > 10:
engine_speed = 1000 # 模拟启动后发动机转速
print("发动机启动成功,当前转速:", engine_speed)
else:
print("启动失败,检查燃油或电池")
return engine_speed在实际车辆起步时,这个启动过程要做到平顺,不能有明显的顿挫感。如果代码中对发动机转速的控制不合理,比如转速提升过快或者过慢,就会影响起步的平顺性。在福特的规范里,就会有具体的主观评价标准,比如要求驾驶员在启动时几乎感觉不到发动机启动瞬间的冲击,这背后其实就是对动力系统控制代码以及硬件协同工作的严格要求。
转向:操控精准度的核心
转向性能直接关系到车辆的操控体验。福特评价规范对转向力的大小、转向的精准度等都有详尽规则。
想象一下,车辆转向系统的代码可能涉及到传感器数据读取和转向指令输出。简单示例如下:
#include <stdio.h>
// 假设这是获取方向盘转角传感器数据的函数
int get_steering_angle_sensor_data() {
return 30; // 模拟返回的转角数据
}
// 根据传感器数据计算并执行转向动作
void perform_steering() {
int angle = get_steering_angle_sensor_data();
if (angle > 0) {
printf("向右转向,角度:%d 度\n", angle);
} else if (angle < 0) {
printf("向左转向,角度:%d 度\n", angle);
} else {
printf("直线行驶\n");
}
}在主观评价中,驾驶员要感受到转向力适中,既不能太轻导致方向飘忽,也不能太重让驾驶费力。而且当转动方向盘时,车辆的转向响应要精准,这就要求代码在处理传感器数据和执行转向动作之间有高效准确的逻辑。如果代码对传感器数据处理不当,比如计算转向角度出现偏差,就会让驾驶员觉得转向不够精准。
操稳:车辆行驶稳定的基石
操稳性能关乎车辆在各种行驶状态下的稳定性和可操控性。规范里从高速行驶稳定性、弯道行驶的姿态等方面给出评价要点。
福特汽车主观评价规范,性能开发参考,英文原版直译,评价条目、规则描述非常细致 包含平顺舒适性,转向,操稳,NVH,制动等
以车辆高速行驶稳定性为例,可能涉及到车辆悬挂系统和电子稳定程序(ESP)的协同工作。假设 ESP 系统有如下简单逻辑:
public class ESP {
private boolean isSkidding;
public ESP() {
isSkidding = false;
}
// 模拟检测车辆是否打滑的方法
public void detectSkidding() {
// 这里省略实际检测逻辑,假设某些条件满足时判定为打滑
if (Math.random() > 0.8) {
isSkidding = true;
}
}
// 当检测到打滑时采取的措施
public void correctSkidding() {
if (isSkidding) {
System.out.println("检测到打滑,ESP 介入调整");
// 实际会有调整车轮制动、动力分配等具体操作代码
}
}
}在主观评价时,驾驶员在高速行驶过程中,车辆要保持直线行驶稳定,遇到横风等情况时车身姿态变化要在可接受范围内。如果 ESP 系统代码对车辆状态检测不准确或者介入时机不当,就会影响操稳性能,让驾驶员感到车辆在高速行驶时不够稳定。
NVH:静谧驾乘空间的保障
NVH(噪声、振动与声振粗糙度)也是福特主观评价规范的重要部分。从发动机噪声、路噪、风噪等多个维度进行评价。
在代码层面,比如车辆的隔音降噪系统可能会有类似这样的控制逻辑(以简单模拟风噪处理为例):
class NoiseControlSystem:
def __init__(self):
self.wind_speed = 0
def set_wind_speed(self, speed):
self.wind_speed = speed
def handle_wind_noise(self):
if self.wind_speed > 50:
print("风噪较大,启动主动降噪系统")
# 实际会有启动相关硬件设备降低风噪的代码
else:
print("风噪较小,无需特殊处理")在实际评价中,乘客在车内要感受到舒适安静的环境,不能被过多的噪声干扰。这就要求车辆从设计到具体代码控制,都要对各种噪声源进行有效处理。如果代码对噪声检测和处理机制不完善,就会导致车内 NVH 性能不佳。
制动:行车安全的最后防线
制动性能的重要性不言而喻。福特评价规范对制动距离、制动踏板感等方面有严格要求。
来看一段简单模拟制动系统逻辑的代码:
using System;
class BrakeSystem {
private float brakeForce;
public BrakeSystem() {
brakeForce = 0;
}
// 根据踏板行程计算制动力
public void calculateBrakeForce(float pedalTravel) {
brakeForce = pedalTravel * 10; // 简单模拟制动力计算
Console.WriteLine("当前制动力:", brakeForce);
}
// 执行制动动作
public void applyBrake() {
if (brakeForce > 0) {
Console.WriteLine("执行制动,制动力:", brakeForce);
} else {
Console.WriteLine("未施加制动");
}
}
}在主观评价时,驾驶员要感受到制动踏板的行程和力度反馈合理,制动过程要平稳且制动距离要符合标准。如果代码对制动力计算不准确,或者制动执行逻辑有问题,就可能导致制动性能下降,危及行车安全。
总的来说,福特汽车主观评价规范为性能开发提供了全面细致的指导,从这些规范深入到代码层面,能看到汽车工程背后严谨又复杂的逻辑,每个细节都关乎着最终的驾乘体验。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 11
11 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)