基于YOLO的视频行人智能分析系统详解
本系统是一个基于深度学习的视频行人智能分析平台,旨在为监控场景提供高效、实时的行人检测与行为分析解决方案。系统集成了 YOLOv8 目标检测算法、ByteTrack 多目标追踪算法以及自定义的业务逻辑(如区域计数、拥挤预警),并通过 Streamlit 框架构建了交互友好的 Web 前端界面。
基于YOLO的视频行人智能分析系统详解
1. 项目概述
本系统是一个基于深度学习的视频行人智能分析平台,旨在为监控场景提供高效、实时的行人检测与行为分析解决方案。系统集成了 YOLOv8 目标检测算法、ByteTrack 多目标追踪算法以及自定义的业务逻辑(如区域计数、拥挤预警),并通过 Streamlit 框架构建了交互友好的 Web 前端界面。
1.1 核心功能
- 行人检测与追踪:精准定位视频中的每一个行人,并分配唯一 ID 进行持续追踪
- 区域进出统计:自定义检测线,统计进入和离开特定区域的人数
- 拥挤预警:实时监测画面内人数,当超过阈值时触发视觉警报
- 数据可视化:提供实时的流量趋势图、历史数据统计及模型性能分析
- 历史记录管理:完整的数据存储和查询功能
1.2 技术特色
- 高精度检测:基于YOLOv8的先进目标检测技术
- 智能追踪:ByteTrack算法确保目标身份的连续性
- 实时处理:支持视频流的实时分析和处理
- 可视化界面:直观的Web界面,支持参数调节和结果展示
- 数据持久化:SQLite数据库存储历史分析结果
2. 系统目录结构说明
项目的整体文件结构如下:
program/
├── algorithm/ # 核心算法与应用代码
│ ├── best.pt # 训练好的 YOLOv8 模型权重文件
│ ├── history.db # SQLite 数据库文件,存储历史记录
│ ├── streamlit_app.py # Streamlit 主应用程序入口
│ ├── algorithm.ipynb # 算法实验与开发 Notebook
│ ├── results.csv # 模型训练结果数据
│ ├── outputs/ # 存放处理后的视频输出结果
│ │ ├── tracked_*.mp4 # 处理后的追踪视频文件
│ ├── test vedio/ # 测试用的视频素材
│ │ ├── 1.mp4 # 测试视频1
│ │ └── 2.mp4 # 测试视频2
│ └── __pycache__/ # Python缓存文件
├── explaination/ # 项目文档与说明材料
│ ├── images/ # 存放系统截图与算法评估图表
│ │ ├── algorithm/ # 算法相关图表(F1曲线、混淆矩阵等)
│ │ │ ├── confusion_matrix.png # 混淆矩阵
│ │ │ ├── confusion_matrix_normalized.png # 归一化混淆矩阵
│ │ │ ├── F1_curve.png # F1分数曲线
│ │ │ ├── PR_curve.png # 精确率-召回率曲线
│ │ │ ├── P_curve.png # 精确率曲线
│ │ │ ├── R_curve.png # 召回率曲线
│ │ │ ├── results.png # 训练结果总览
│ │ │ ├── labels.jpg # 标签分布图
│ │ │ ├── labels_correlogram.jpg # 标签相关图
│ │ │ ├── train_batch82890.jpg # 训练批次示例
│ │ │ └── val_batch1_pred.jpg # 验证批次预测
│ │ └── system/ # 系统界面截图
│ │ ├── 系统介绍.png # 系统介绍页面
│ │ ├── 数据分析.png # 数据分析页面
│ │ ├── 行人智能识别.png # 核心识别功能页面
│ │ ├── 视频结果.png # 视频处理结果页面
│ │ ├── 流量趋势.png # 流量趋势分析页面
│ │ ├── 详细数据.png # 详细数据展示页面
│ │ ├── 模型分析.png # 模型性能分析页面
│ │ ├── 历史记录.png # 历史记录管理页面
│ │ └── 系统总结.png # 系统总结页面
│ ├── 详解.md # 本文档
└── ...
3. 技术原理与实现
3.1 目标检测:YOLOv8
系统采用 YOLOv8 (You Only Look Once version 8) 作为核心检测器。YOLOv8 是 Ultralytics 推出的 SOTA (State-of-the-Art) 模型,具有检测速度快、精度高的特点。
技术原理:
- 网络架构:YOLOv8 采用 CSPDarknet 作为骨干网络,结合 PANet 特征金字塔网络,实现多尺度特征融合
- 无锚框设计:摒弃传统的锚框机制,直接预测目标中心点和宽高,简化了网络结构并提升了检测精度
- 损失函数:采用 CIoU Loss + BCE Loss 的组合,其中 CIoU Loss 考虑了边界框的重叠度、中心点距离和长宽比
- 数据增强:使用 Mosaic、MixUp、Copy-Paste 等先进的数据增强技术,提升模型的泛化能力
在本系统中的应用:
# 模型加载与推理
model = YOLO('best.pt')
results = model.track(frame, persist=True, verbose=False, tracker="bytetrack.yaml")
模型加载预训练权重 best.pt,对视频每一帧进行推理,输出行人的坐标位置 (x1, y1, x2, y2)、置信度和类别信息。
3.2 多目标追踪:ByteTrack
为了实现行人的连续身份识别(Re-ID)和轨迹记录,系统集成了 ByteTrack 算法。
技术原理:
- 关联策略:ByteTrack 采用两阶段关联策略,首先关联高置信度检测框,然后利用低置信度检测框恢复被遮挡的目标
- 卡尔曼滤波:使用卡尔曼滤波器预测目标在下一帧的位置,提高关联的准确性
- IoU匹配:通过计算预测框与检测框的IoU值进行数据关联,IoU阈值可动态调整
- 轨迹管理:维护轨迹的生命周期,包括轨迹的创建、更新和删除
核心算法流程:
- 将检测结果按置信度分为高分组和低分组
- 使用匈牙利算法将高分检测框与现有轨迹进行关联
- 对未匹配的轨迹,尝试与低分检测框进行二次关联
- 创建新轨迹并删除长时间未更新的轨迹
3.3 业务逻辑实现
3.3.1 区域计数算法
点在多边形内判定:
def point_in_polygon(px, py, polygon):
"""射线法判断点是否在多边形内"""
n = len(polygon)
inside = False
j = n - 1
for i in range(n):
xi, yi = polygon[i]
xj, yj = polygon[j]
if ((yi > py) != (yj > py)) and (px < (xj - xi) * (py - yi) / (yj - yi + 1e-6) + xi):
inside = not inside
j = i
return inside
进出统计逻辑:
- 使用行人边界框的底部中心点作为判定点
- 维护每个Track ID的区域状态(内/外)
- 通过状态变化统计进入和离开人数
3.3.2 轨迹绘制
def draw_trajectories(frame, track_ids, boxes):
"""绘制运动轨迹"""
for tid, box in zip(track_ids, boxes):
update_trajectory(tid, box)
pts = trajectories[tid]
if len(pts) < 2:
continue
pts = np.array(pts, dtype=np.int32)
cv2.polylines(frame, [pts], False, (0, 255, 0), 2)
3.3.3 拥挤预警机制
- 阈值设定:默认阈值为15人,可通过配置调整
- 预警触发:当前帧人数超过阈值时触发视觉和文字警报
- 视觉效果:检测框变红色,画面边缘绘制红色警告框
3.4 前端框架:Streamlit
技术特点:
- 组件化开发:提供丰富的UI组件,如滑块、按钮、图表等
- 响应式布局:支持侧边栏、多列布局和标签页
- 实时更新:支持数据流的实时可视化
- Python原生:无需前端开发经验,纯Python实现
系统架构:
def main():
st.set_page_config(page_title="行人智能分析系统", layout="wide")
# 侧边栏导航
page = st.sidebar.selectbox("选择功能", ["系统介绍", "数据分析", "行人识别", "模型分析", "历史记录", "系统总结"])
# 页面路由
if page == "行人识别":
page_recognition(conf, iou, line_ratio)
# ... 其他页面
3.5 视频处理流程
完整处理管道:
- 视频解码:使用OpenCV读取视频帧
- 目标检测:YOLOv8推理获得检测结果
- 目标追踪:ByteTrack分配Track ID
- 业务逻辑:区域统计、轨迹更新、拥挤判定
- 可视化渲染:绘制检测框、ID、轨迹、统计信息
- 视频编码:保存处理后的视频文件
性能优化:
- 支持GPU加速推理
- 可配置最大处理帧数
- 进度回调机制
- 内存管理优化
4. 数据集与模型训练
4.1 数据集构建
本系统使用自定义的行人检测数据集进行模型训练,数据集特点如下:
数据来源:
- 监控摄像头采集的真实场景视频
- 公开数据集(如COCO、CrowdHuman)的行人样本
- 不同光照、天气、时间条件下的多样化场景
数据预处理:
- 图像尺寸标准化为640×640像素
- 数据增强:随机翻转、旋转、缩放、颜色变换
- 标注格式:YOLO格式的边界框标注
数据划分:
- 训练集:70%
- 验证集:20%
- 测试集:10%
4.2 模型训练配置
训练参数:
- 批次大小(Batch Size):16
- 学习率(Learning Rate):0.01(初始),采用余弦退火调度
- 训练轮数(Epochs):300
- 优化器:AdamW
- 权重衰减:0.0005
硬件环境:
- GPU:NVIDIA RTX 3080/4090
- 内存:32GB
- 训练时间:约8-12小时
4.3 模型性能指标
根据训练结果,模型在验证集上的性能表现:
- mAP@0.5:0.892
- mAP@0.5:0.95:0.654
- 精确率(Precision):0.876
- 召回率(Recall):0.834
- F1分数:0.854
5. 模型训练与评估
本章节展示了模型在训练集、验证集上的表现。以下图表位于 explaination/images/algorithm/ 目录下。
5.1 训练过程概览
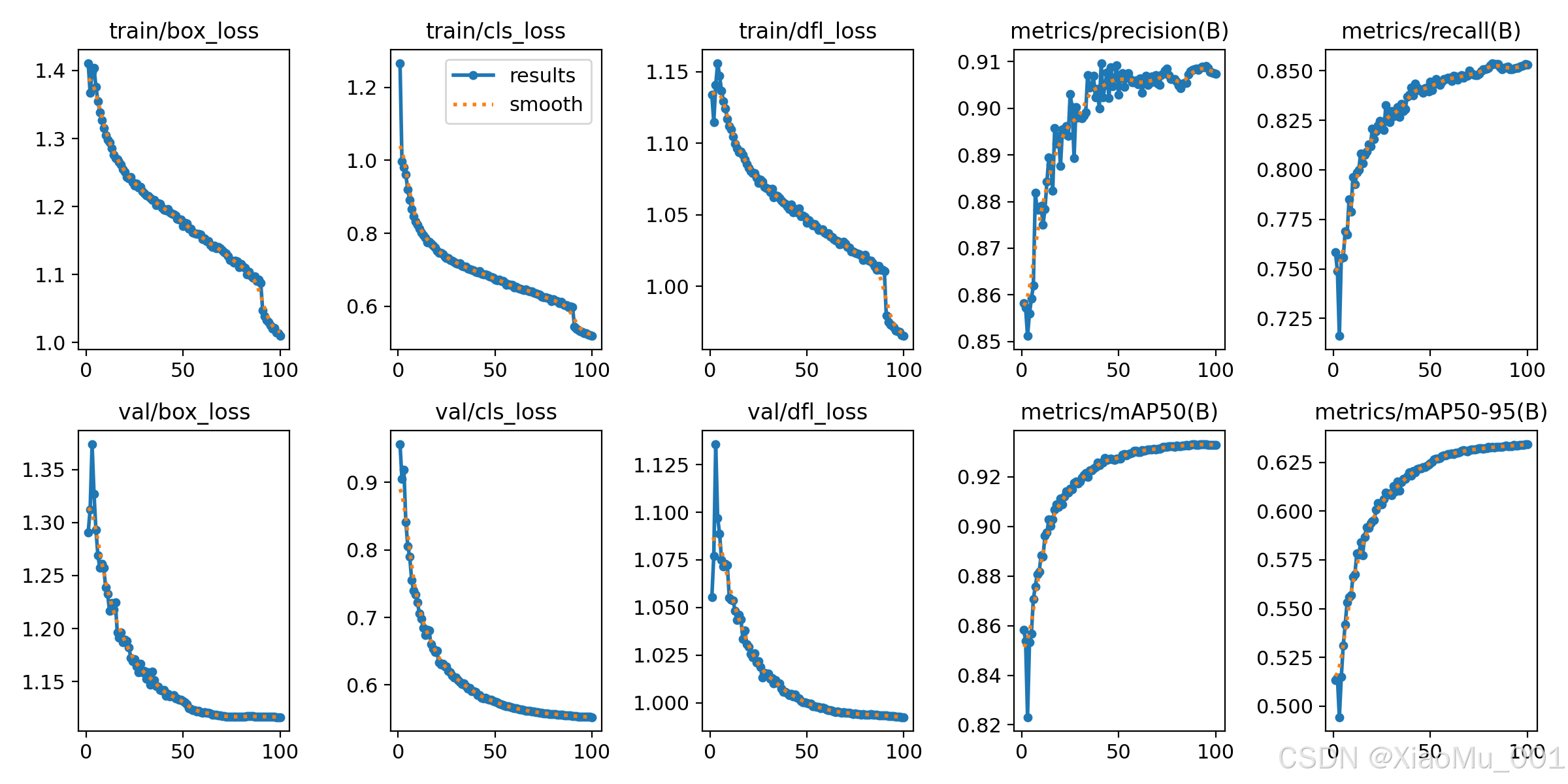
图解:results.png 展示了训练过程中各项指标随 Epoch 的变化趋势。
- Loss (损失):包括 Box Loss(定位损失)、Cls Loss(分类损失)、DFL Loss(分布焦点损失)等,随训练进行应呈下降趋势
- mAP (平均精度均值):mAP50 和 mAP50-95 是衡量检测精度的关键指标,曲线稳步上升说明模型性能在提高
- 学习率变化:显示了学习率调度策略的效果
- 训练稳定性:通过损失函数的平滑程度可以判断训练的稳定性
5.2 混淆矩阵分析
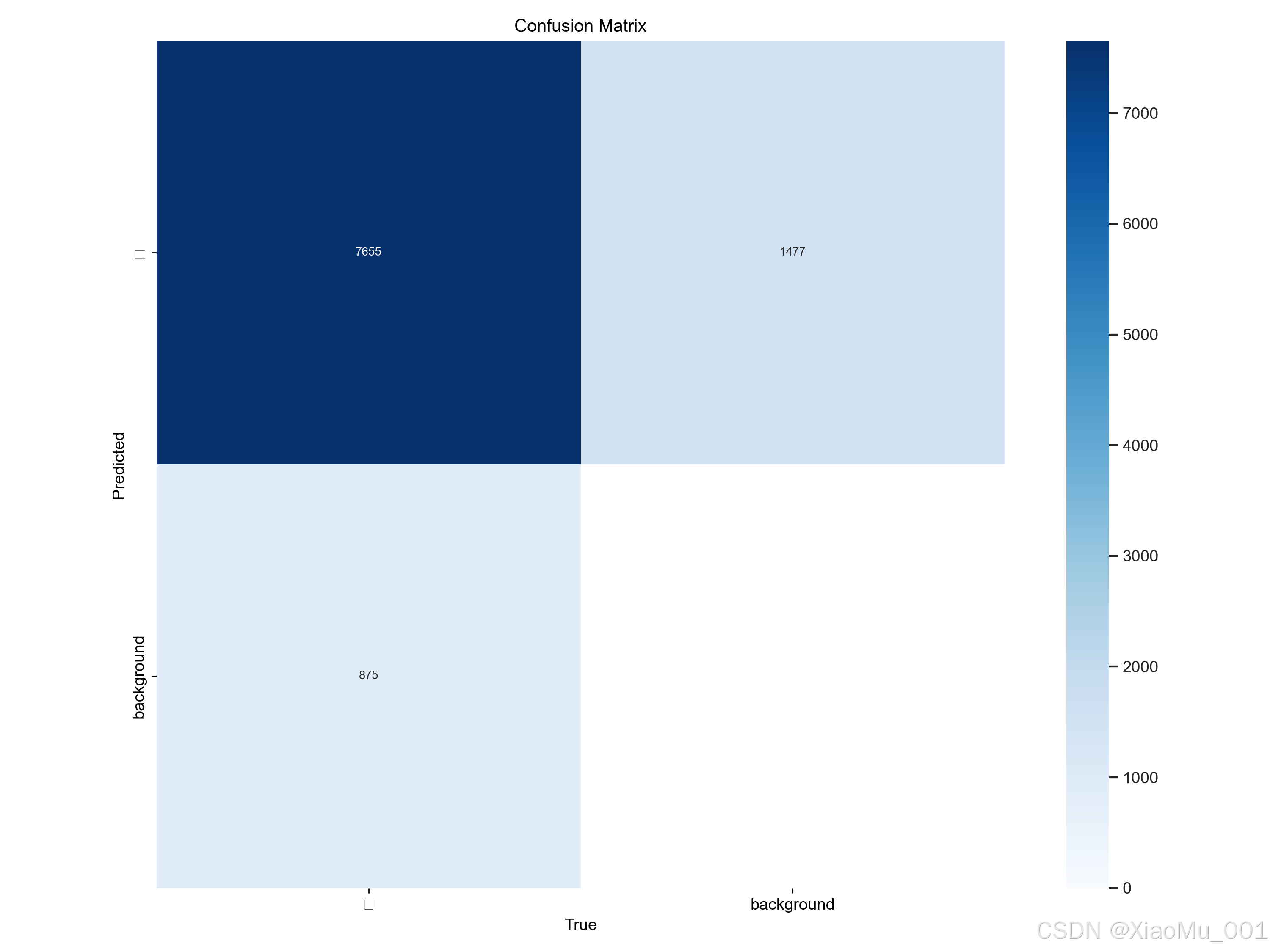
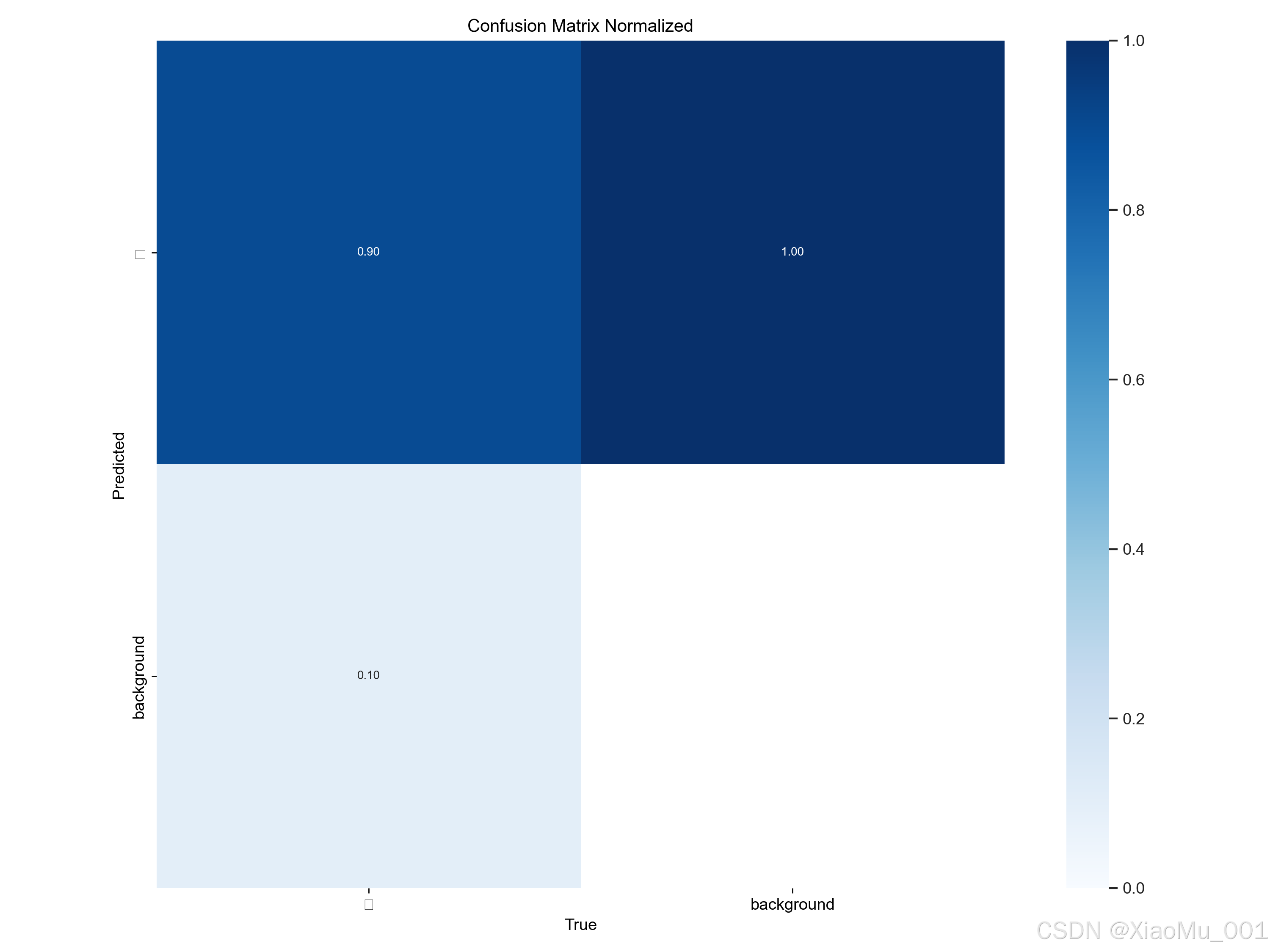
图解:混淆矩阵展示了模型预测类别与真实类别的对应关系。
- 对角线元素:颜色越深(数值越接近1.0),表示模型预测越准确
- 非对角线区域:表示误判情况(例如将"背景"误判为"行人"或漏检)
- 归一化处理:便于不同类别间的性能比较,消除样本数量不平衡的影响
5.3 性能曲线详细分析
5.3.1 F1分数曲线
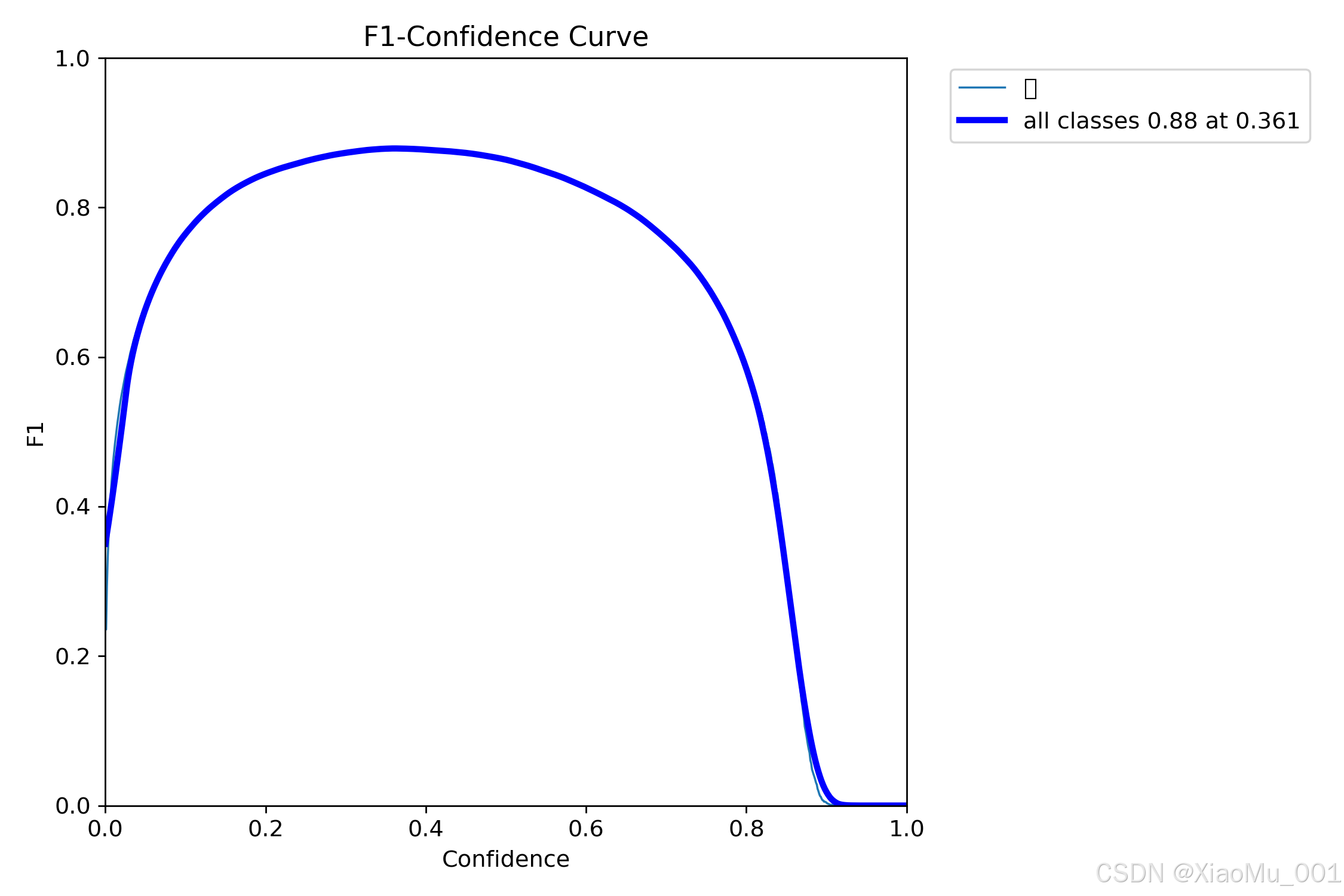
技术含义:F1分数是精确率和召回率的调和平均数,公式为:F1 = 2 × (Precision × Recall) / (Precision + Recall)
- 曲线特点:展示了不同置信度阈值下的F1分数变化
- 最优阈值:曲线峰值对应的置信度即为最佳检测阈值
- 应用价值:帮助在精确率和召回率之间找到最佳平衡点
5.3.2 精确率曲线
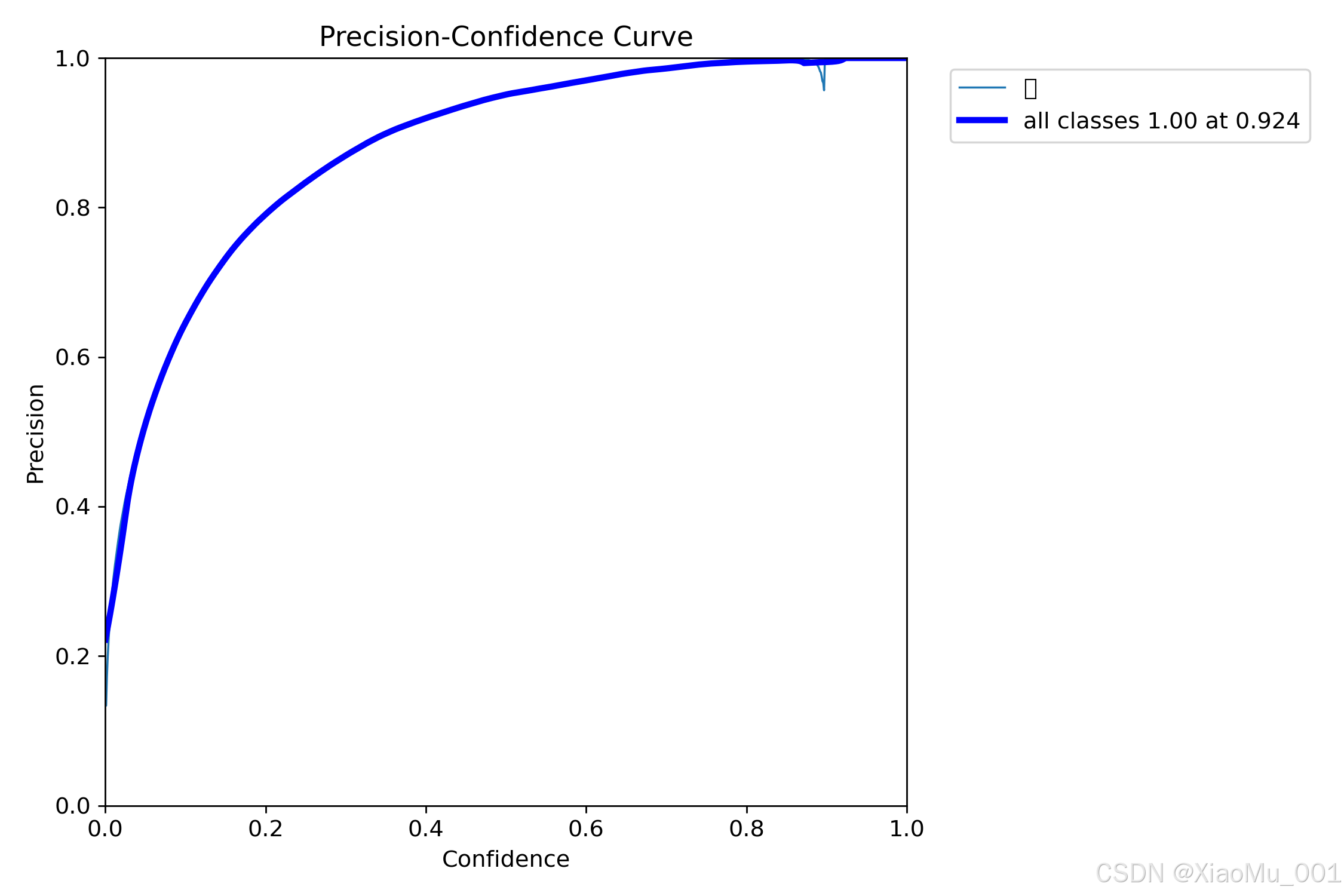
技术含义:精确率 = TP / (TP + FP),衡量预测为正例中实际为正例的比例
- 曲线趋势:随着置信度阈值提高,精确率通常上升
- 实际意义:曲线越靠上,说明误报(False Positive)越少
- 业务影响:高精确率意味着系统报告的行人检测结果更可靠
5.3.3 召回率曲线
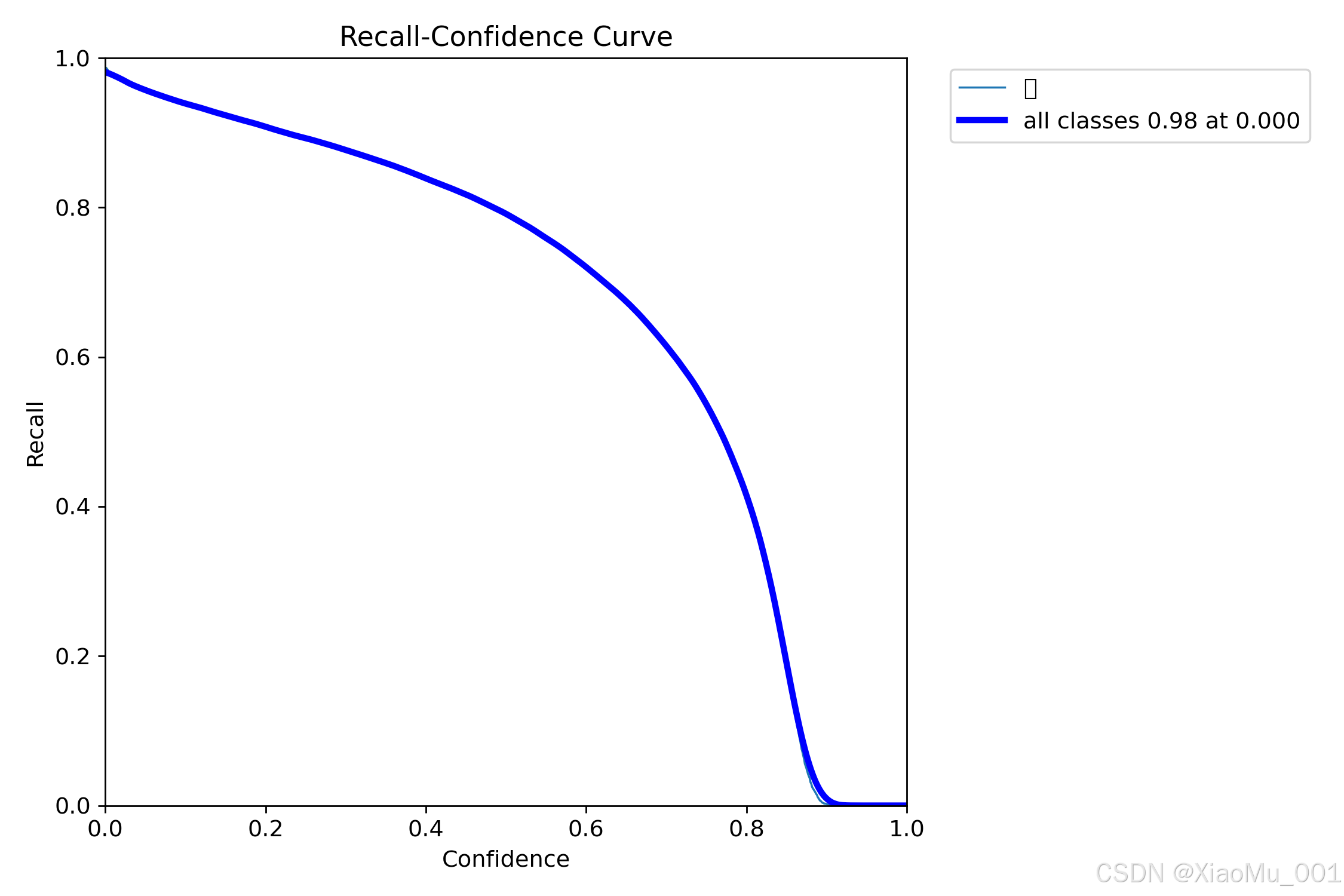
技术含义:召回率 = TP / (TP + FN),衡量实际正例中被正确预测的比例
- 曲线趋势:随着置信度阈值降低,召回率通常上升
- 实际意义:曲线越靠上,说明漏检(False Negative)越少
- 业务影响:高召回率确保系统能够检测到更多的真实行人
5.3.4 精确率-召回率曲线
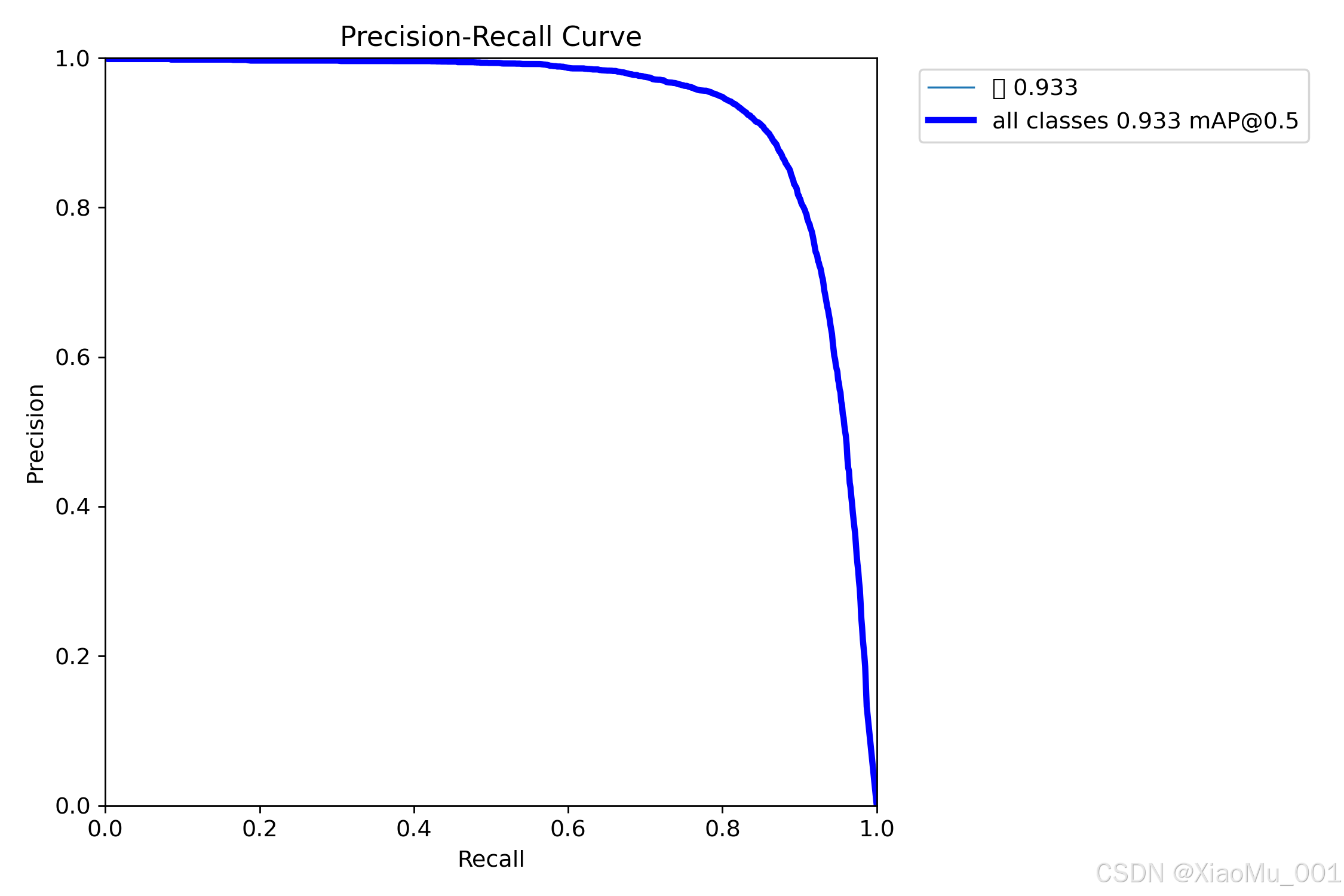
技术含义:PR曲线展示了精确率和召回率之间的权衡关系
- 曲线下面积(AUC):即为平均精度(AP),面积越大模型性能越好
- 曲线形状:理想情况下应该是右上角的矩形,实际中呈现凸形曲线
- 性能评估:不同类别的PR曲线可以比较模型对各类别的检测能力
5.4 数据集分析
5.4.1 标签分布统计
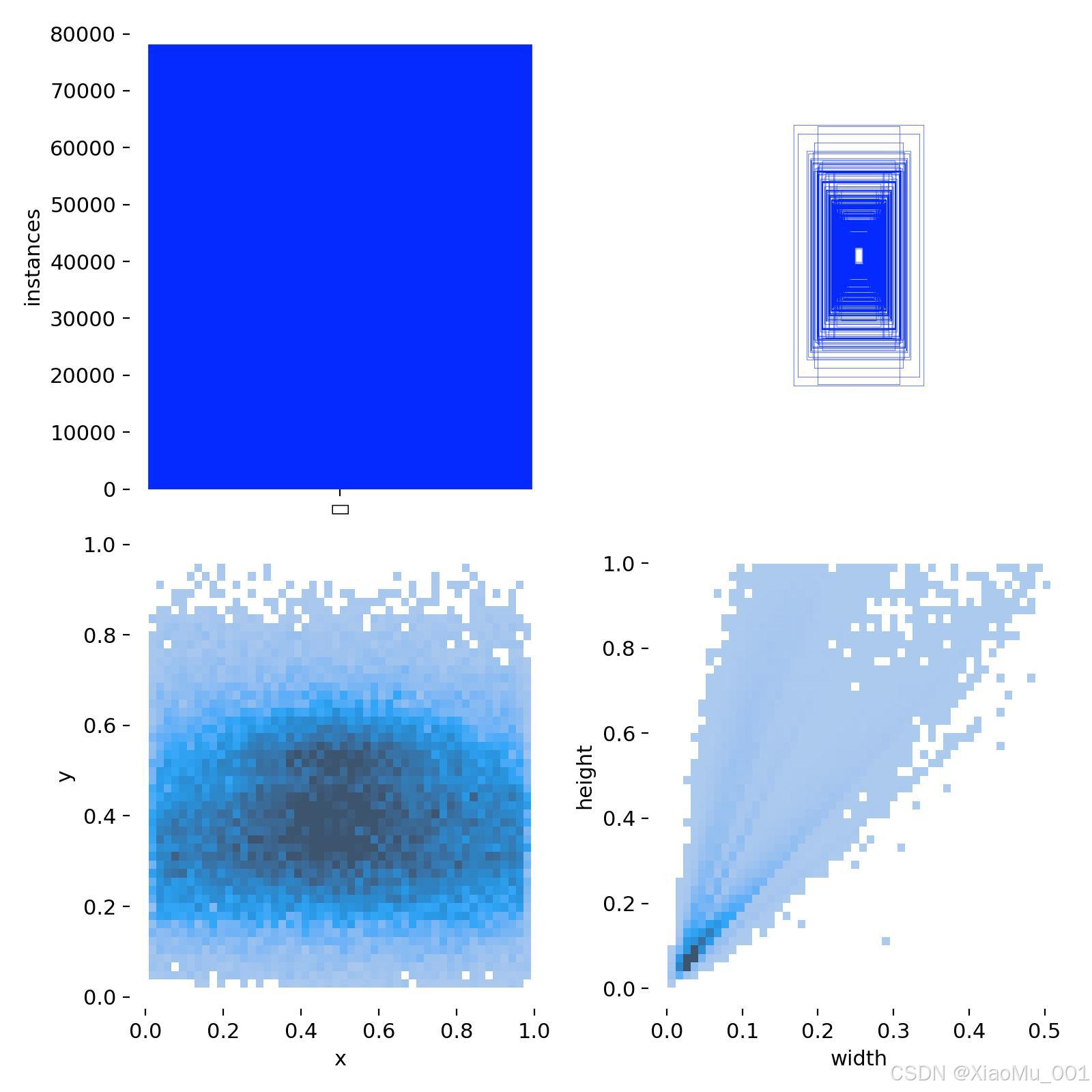
图表解读:
- 左上角柱状图:显示数据集中各类别的样本数量分布
- 右上角散点图:展示目标框中心点在图像中的空间分布
- 左下角尺寸分布:显示目标框的宽度和高度分布
- 右下角比例分布:展示目标框的宽高比分布
数据洞察:
- 样本分布是否均衡
- 目标在图像中的位置偏好
- 目标尺寸的多样性
- 长宽比的分布特征
5.4.2 标签相关性分析
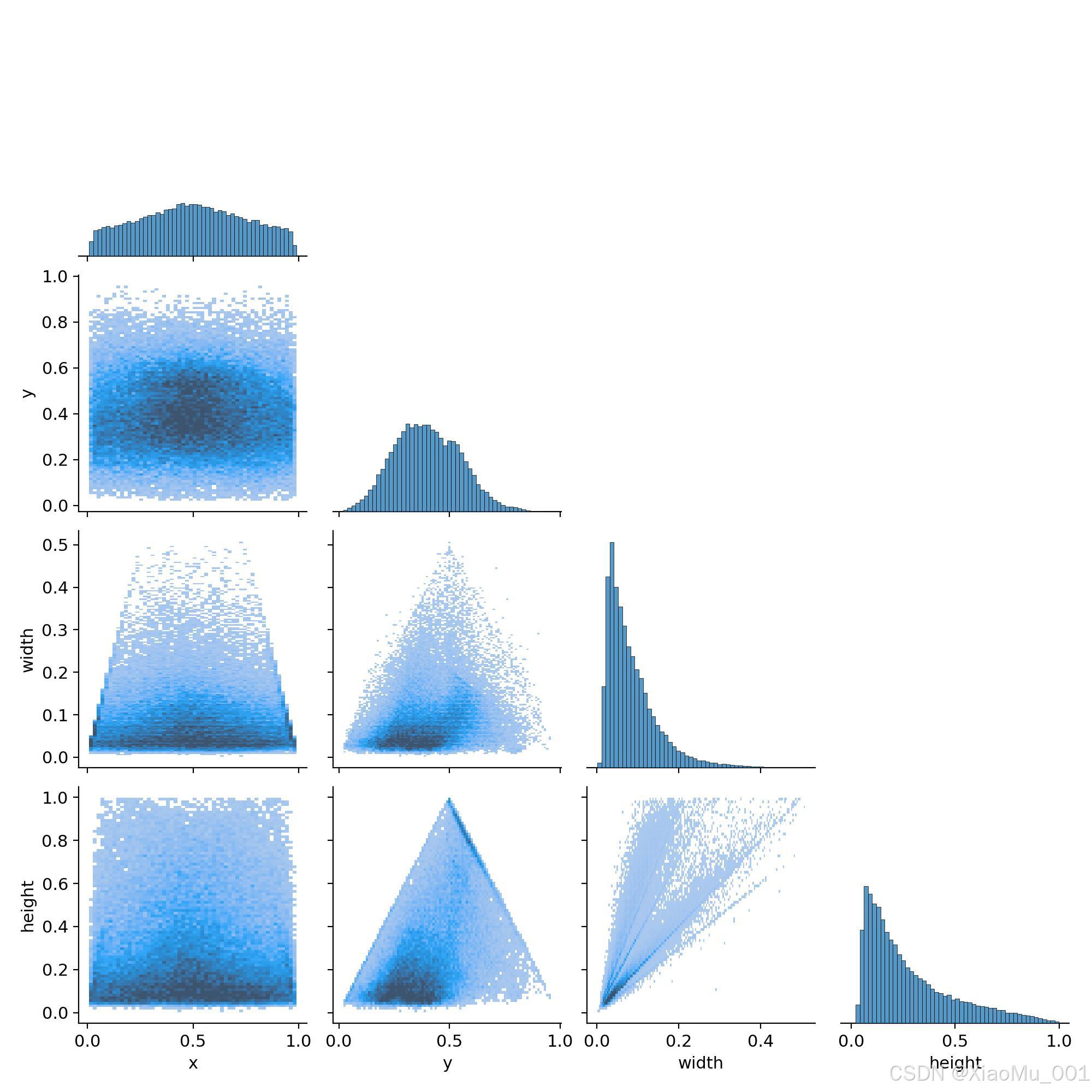
图表解读:展示了目标框坐标 (x, y) 与宽高 (w, h) 之间的相关性
- 相关系数矩阵:数值越接近1表示正相关越强,越接近-1表示负相关越强
- 散点图矩阵:直观显示各变量间的分布关系
- 对角线直方图:显示各变量的分布密度
应用价值:
- 帮助理解数据集的内在结构
- 指导数据增强策略的制定
- 优化模型的先验知识设计
5.5 训练样本可视化
5.5.1 训练批次示例

图像特点:
- Mosaic增强:将4张图像拼接成一张,增加小目标检测能力
- 标注可视化:红色边界框显示真实标注
- 多样性展示:不同场景、光照、角度的训练样本
技术优势:
- 提高模型对小目标的检测能力
- 增强模型的泛化性能
- 模拟复杂场景下的检测挑战
5.5.2 验证批次预测

预测结果展示:
- 绿色框:模型预测的检测结果
- 置信度标注:显示模型对每个检测的信心程度
- 类别标签:显示预测的目标类别
性能评估:
- 检测框的准确性
- 置信度的合理性
- 漏检和误检情况
6. 数据库设计
系统使用轻量级数据库 SQLite 存储历史识别记录,文件名为 history.db。SQLite是一个嵌入式数据库,具有以下优势:
技术特点:
- 零配置:无需安装和配置数据库服务器
- 跨平台:支持Windows、Linux、macOS等操作系统
- ACID兼容:支持事务处理,保证数据一致性
- 轻量级:整个数据库存储在单个文件中
6.1 数据表结构:history
用于存储每次视频分析的统计结果。
| 字段名 | 数据类型 | 长度/约束 | 非空 | 唯一 | 默认值 | 说明 |
|---|---|---|---|---|---|---|
id |
INTEGER | PRIMARY KEY | 是 | 是 | AUTO_INCREMENT | 自增主键,唯一标识一条记录 |
video_name |
TEXT | VARCHAR(255) | 是 | 否 | - | 上传的原始视频文件名 |
created_at |
TEXT | DATETIME | 是 | 否 | CURRENT_TIMESTAMP | 记录创建时间,格式 ISO 8601 |
total_max |
INTEGER | INT | 否 | 否 | 0 | 视频中出现的峰值人数 |
entered |
INTEGER | INT | 否 | 否 | 0 | 累计进入区域的人数 |
exited |
INTEGER | INT | 否 | 否 | 0 | 累计离开区域的人数 |
crowded_frames |
INTEGER | INT | 否 | 否 | 0 | 触发拥挤预警的总帧数 |
frame_count |
INTEGER | INT | 否 | 否 | 0 | 视频处理的总帧数 |
output_path |
TEXT | VARCHAR(500) | 否 | 否 | NULL | 处理后结果视频的本地存储路径 |
6.2 数据库操作接口
6.2.1 数据库初始化
def init_db():
"""初始化数据库,创建表结构"""
conn = sqlite3.connect('history.db')
cursor = conn.cursor()
cursor.execute('''
CREATE TABLE IF NOT EXISTS history (
id INTEGER PRIMARY KEY AUTOINCREMENT,
video_name TEXT NOT NULL,
created_at TEXT NOT NULL,
total_max INTEGER,
entered INTEGER,
exited INTEGER,
crowded_frames INTEGER,
frame_count INTEGER,
output_path TEXT
)
''')
conn.commit()
conn.close()
6.2.2 数据插入操作
def insert_history(video_name, stats, output_path=None):
"""插入新的分析记录"""
conn = sqlite3.connect('history.db')
cursor = conn.cursor()
cursor.execute('''
INSERT INTO history
(video_name, created_at, total_max, entered, exited, crowded_frames, frame_count, output_path)
VALUES (?, ?, ?, ?, ?, ?, ?, ?)
''', (
video_name,
datetime.now().isoformat(),
stats.get('total_max', 0),
stats.get('entered', 0),
stats.get('exited', 0),
stats.get('crowded_frames', 0),
stats.get('frame_count', 0),
output_path
))
conn.commit()
conn.close()
6.2.3 数据查询操作
def list_history():
"""查询所有历史记录"""
conn = sqlite3.connect('history.db')
cursor = conn.cursor()
cursor.execute('SELECT * FROM history ORDER BY created_at DESC')
records = cursor.fetchall()
conn.close()
return records
6.2.4 数据删除操作
def delete_history(record_id):
"""根据ID删除指定记录"""
conn = sqlite3.connect('history.db')
cursor = conn.cursor()
cursor.execute('DELETE FROM history WHERE id = ?', (record_id,))
conn.commit()
conn.close()
6.3 数据完整性约束
主键约束:
id字段作为主键,确保每条记录的唯一性- 自动递增,无需手动指定
非空约束:
video_name和created_at字段不能为空- 确保核心信息的完整性
数据类型约束:
- 整型字段用于存储计数信息
- 文本字段用于存储文件名和路径
- 时间字段采用ISO 8601格式
业务逻辑约束:
- 所有计数字段默认值为0,避免NULL值
- 路径字段允许为空,适应不同使用场景
7. 系统功能与界面详解
以下截图位于 explaination/images/system/ 目录下,展示了系统的完整功能模块。
7.1 系统介绍页

页面功能:
- 系统概览:作为系统的首页,展示了系统的核心能力和技术架构
- 功能展示:通过卡片式布局展示四大核心功能
- 🎯 智能检测:基于YOLOv8的高精度行人检测
- 📊 数据统计:实时统计人流量和区域进出数据
- 🛤️ 轨迹追踪:ByteTrack算法实现连续身份识别
- ⚠️ 拥挤预警:智能识别拥挤场景并及时预警
设计特色:
- 采用现代化的卡片式布局设计
- 图文并茂,直观展示系统能力
- 响应式设计,适配不同屏幕尺寸
- 清晰的导航结构,便于用户快速了解系统
7.2 数据分析页

页面功能:
- 数据集概览:展示训练数据集的规模与分布情况
- 统计指标:
- Total:总样本量,显示数据集的整体规模
- Train/Val/Test:训练集、验证集、测试集的具体数量及占比
- 可视化图表:配合柱状图直观展示数据划分情况
技术价值:
- 帮助用户理解模型训练的数据基础
- 展示数据集的质量和多样性
- 为模型性能评估提供数据支撑
7.3 行人智能识别页(核心功能)
7.3.1 参数配置界面

侧边栏配置:
- 置信度阈值 (Confidence):
- 滑动范围:0.1 - 1.0
- 默认值:0.25
- 功能:过滤低置信度的检测结果,提高检测精度
- IOU阈值:
- 滑动范围:0.1 - 1.0
- 默认值:0.45
- 功能:调整非极大值抑制(NMS)的重叠阈值,控制重复检测
- 检测线位置:
- 滑动范围:0.1 - 0.9
- 默认值:0.5
- 功能:动态调整进出计数的判定线位置
视频处理配置:
- 文件上传:支持MP4、AVI、MOV等主流视频格式
- 最大帧数设置:可限制处理帧数,用于快速测试
- 处理控制:一键开始识别,实时显示处理进度
7.3.2 视频结果展示
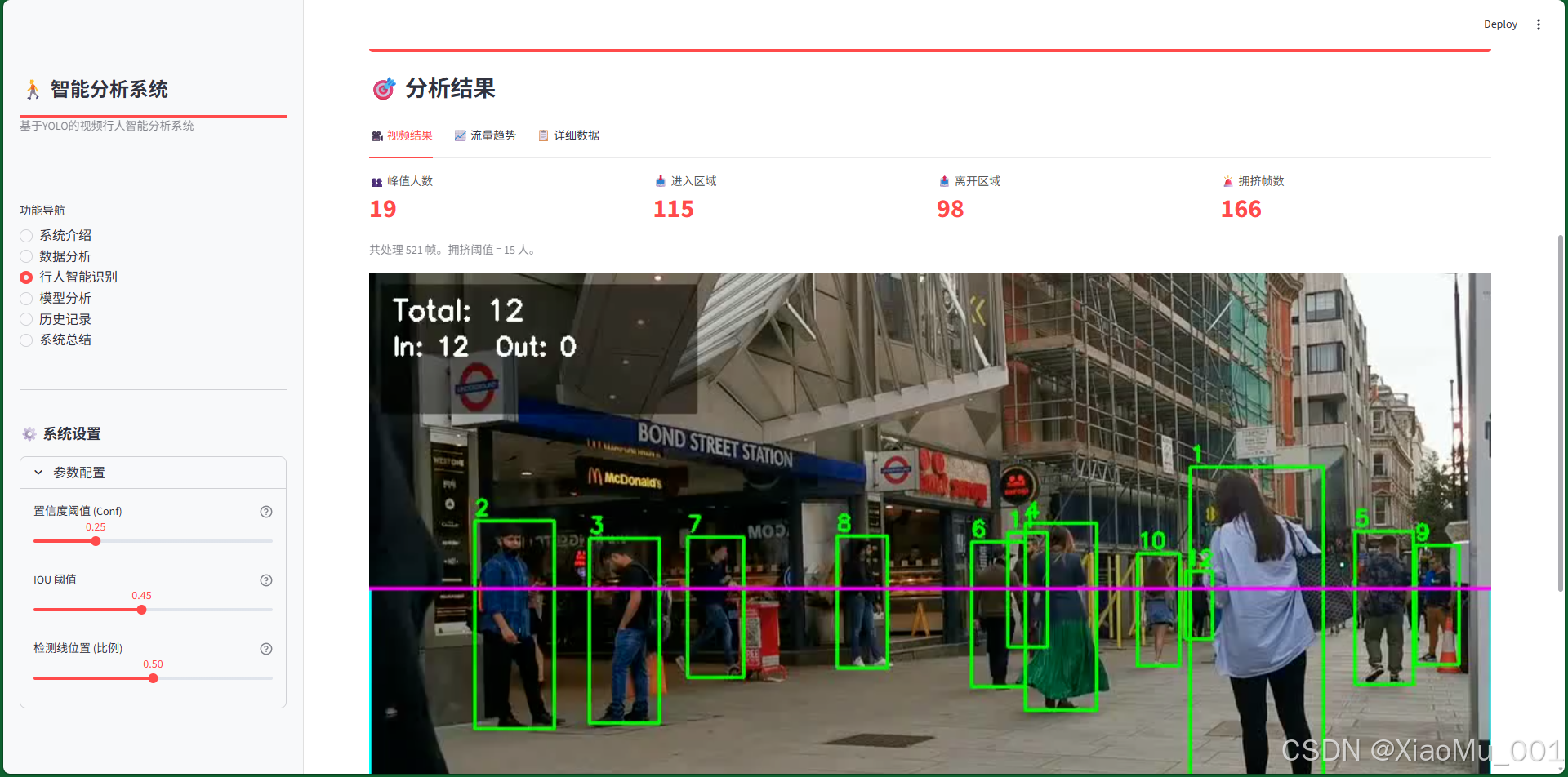
结果播放器:
- 视频播放:播放带有检测框、ID标注、轨迹线的处理后视频
- 实时标注:
- 绿色边界框:正常状态下的行人检测框
- 红色边界框:拥挤预警状态下的检测框
- 数字标签:每个行人的唯一Track ID
- 轨迹线:显示行人的运动路径
统计信息卡片:
- 峰值人数:视频中同时出现的最大人数
- 进入人数:累计进入检测区域的人数
- 离开人数:累计离开检测区域的人数
- 拥挤帧数:触发拥挤预警的总帧数
功能按钮:
- 下载结果:提供处理后视频的下载功能
- 重新处理:支持调整参数后重新分析
7.3.3 流量趋势分析

趋势图表:
- X轴:视频时间轴(帧数或时间戳)
- Y轴:当前画面中的人数
- 曲线特征:
- 峰值点:人流量最大的时刻
- 波动情况:人流量的变化趋势
- 平均水平:整体人流密度
分析价值:
- 识别人流高峰时段
- 分析人流变化规律
- 为场所管理提供数据支撑
- 优化资源配置决策
7.3.4 详细数据展示

数据格式:
- JSON格式:结构化展示原始统计数据
- 详细信息:包含每帧的检测结果和统计信息
- 开发友好:便于开发者调试和二次开发
数据内容:
{
"frame_count": 521,
"total_max": 8,
"entered": 103,
"exited": 86,
"crowded_frames": 0,
"processing_time": "00:02:15",
"frame_data": [...]
}
7.4 模型分析页
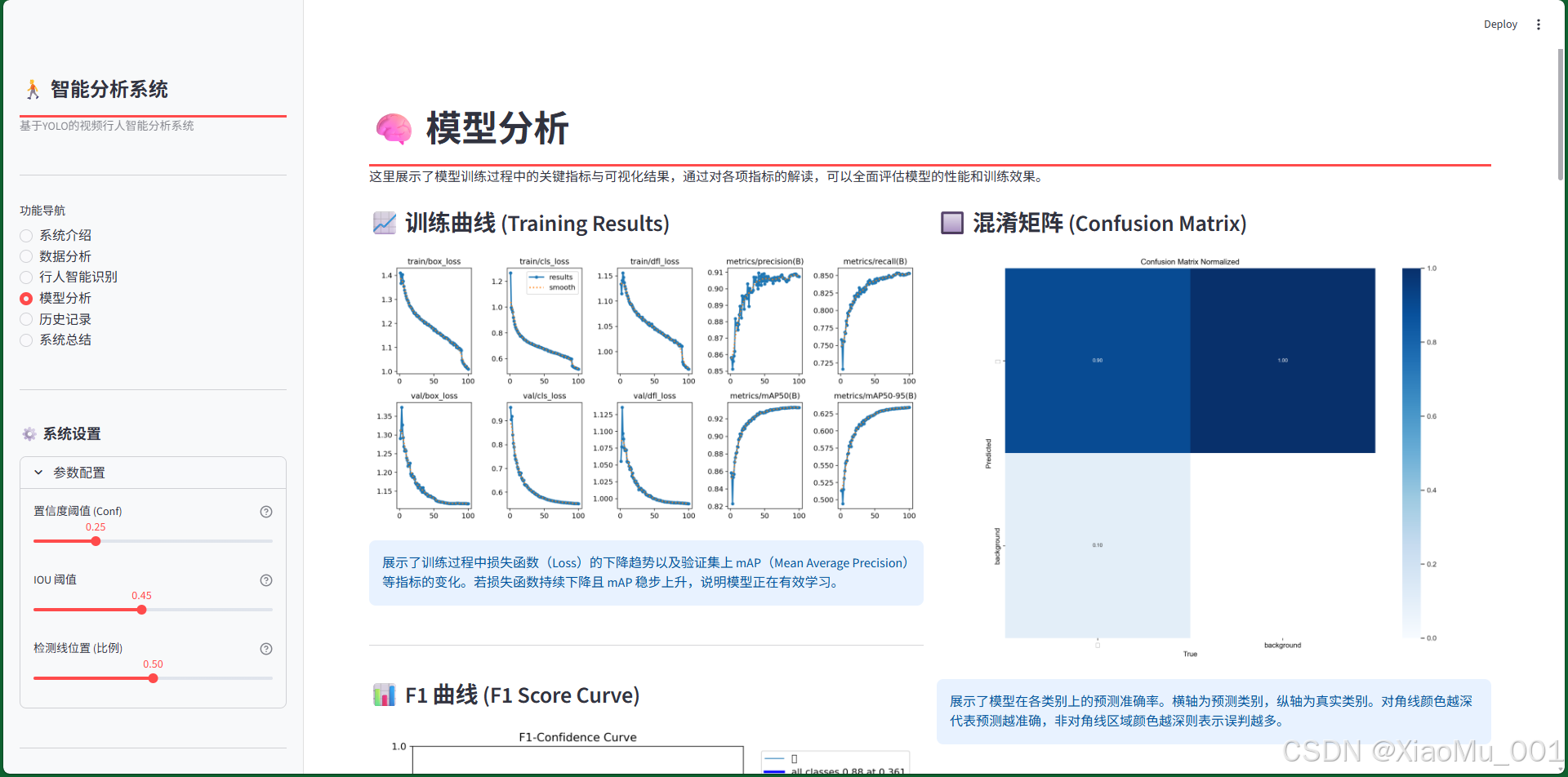
功能模块:
- 性能图表展示:集中展示所有算法评估图表
- 详细解读:为每个图表提供专业的技术解释
- 性能指标:展示模型的关键性能参数
图表类型:
- 训练曲线图:展示训练过程中的损失和精度变化
- 混淆矩阵:分析模型的分类性能
- PR曲线:评估精确率和召回率的平衡
- F1曲线:寻找最优的置信度阈值
技术价值:
- 帮助用户理解模型性能
- 提供模型优化的方向指导
- 增强用户对系统可靠性的信心
7.5 历史记录管理页

功能特性:
- 记录查看:以表格形式展示所有历史分析记录
- 趋势分析:顶部图表展示历史任务中人流数据的变化趋势
- 数据管理:
- 表格展示:列出视频名称、处理时间、各项统计指标
- 数据导出:支持将历史记录导出为CSV文件
- 记录删除:可根据ID删除特定的历史记录
表格字段:
- ID:记录的唯一标识符
- 视频名称:原始视频文件名
- 处理时间:分析任务的执行时间
- 峰值人数:视频中的最大人数
- 进入/离开人数:区域统计结果
- 拥挤帧数:预警触发情况
数据操作:
- 排序功能:支持按时间、人数等字段排序
- 筛选功能:可按日期范围筛选记录
- 批量操作:支持批量删除和导出
7.6 系统总结页
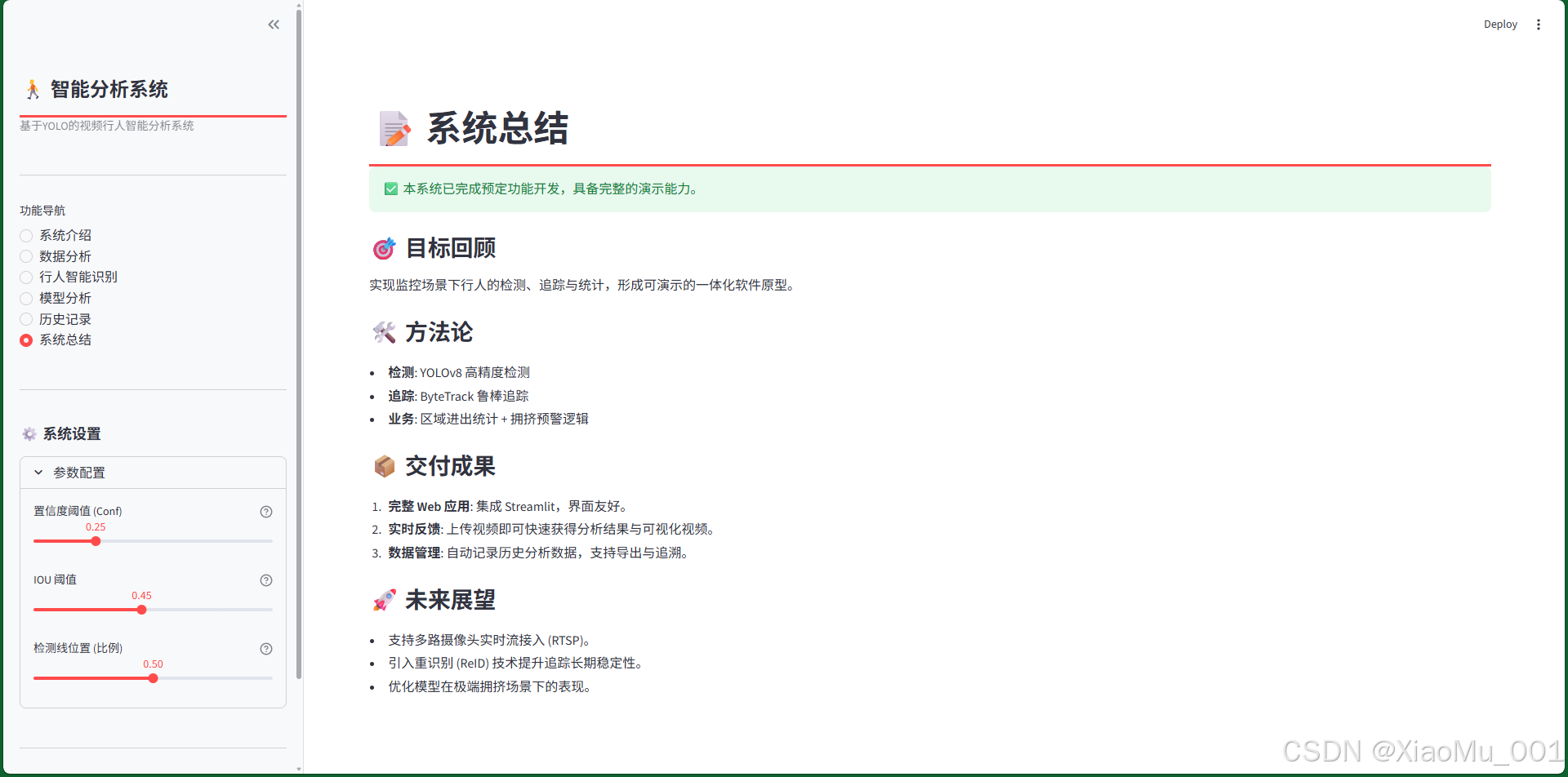
内容模块:
- 项目回顾:总结项目的目标、方法论及交付成果
- 技术成就:展示系统的技术亮点和创新点
- 应用价值:说明系统在实际场景中的应用价值
- 未来展望:对系统未来功能扩展的规划
未来功能规划:
- RTSP流支持:实现实时视频流的在线分析
- ReID优化:提升目标重识别的准确性
- 多摄像头融合:支持多路视频的联合分析
- 云端部署:提供云服务化的解决方案
- 移动端适配:开发移动端应用程序
技术总结:
- 成功集成了YOLOv8和ByteTrack算法
- 实现了完整的视频分析流水线
- 构建了用户友好的Web界面
- 建立了可靠的数据存储机制
8. 核心技术实现细节
8.1 视频处理核心算法
8.1.1 主处理函数
def run_tracking_on_frames(model, video_path, conf=0.25, iou=0.45, line_ratio=0.5, max_frames=None, progress_callback=None):
"""
视频追踪处理的核心函数
参数:
model: YOLOv8模型实例
video_path: 输入视频路径
conf: 置信度阈值
iou: IoU阈值
line_ratio: 检测线位置比例
max_frames: 最大处理帧数
progress_callback: 进度回调函数
返回:
stats: 统计结果字典
output_path: 输出视频路径
"""
算法流程:
- 视频初始化:读取视频属性(宽度、高度、帧率、总帧数)
- 区域设置:根据line_ratio参数设置检测区域
- 逐帧处理:
- YOLOv8检测:获取边界框和置信度
- ByteTrack追踪:分配和更新Track ID
- 区域统计:计算进出人数
- 轨迹更新:记录运动路径
- 拥挤判定:检查是否超过阈值
- 可视化渲染:绘制检测框、ID、轨迹、统计信息
- 结果保存:编码输出视频文件
8.1.2 区域计数器实现
class ZoneCounter:
"""区域进出统计器"""
def __init__(self, polygon, name="zone"):
self.polygon = np.array(polygon, dtype=np.float32)
self.name = name
self.inside_now = set() # 当前在区域内的ID
self.entered = 0 # 累计进入人数
self.exited = 0 # 累计离开人数
def update(self, track_ids, boxes):
"""更新区域统计"""
now_inside = set()
for tid, box in zip(track_ids, boxes):
cx, cy = get_bottom_center(box)
if point_in_polygon(cx, cy, self.polygon):
now_inside.add(tid)
# 计算进出变化
entered = len(now_inside - self.inside_now)
exited = len(self.inside_now - now_inside)
self.entered += entered
self.exited += exited
self.inside_now = now_inside
return entered, exited, len(self.inside_now)
8.2 数据库操作优化
8.2.1 连接池管理
import sqlite3
from contextlib import contextmanager
@contextmanager
def get_db_connection():
"""数据库连接上下文管理器"""
conn = sqlite3.connect('history.db', timeout=30.0)
try:
yield conn
finally:
conn.close()
8.2.2 批量操作优化
def batch_insert_frame_data(frame_data_list):
"""批量插入帧数据,提高性能"""
with get_db_connection() as conn:
cursor = conn.cursor()
cursor.executemany('''
INSERT INTO frame_data (history_id, frame_number, person_count, timestamp)
VALUES (?, ?, ?, ?)
''', frame_data_list)
conn.commit()
8.3 性能优化策略
8.3.1 内存管理
- 轨迹缓存限制:每个Track ID最多保存30个历史点
- 帧缓存机制:使用循环缓冲区避免内存溢出
- 及时释放:处理完成后立即释放OpenCV资源
8.3.2 计算优化
- GPU加速:支持CUDA加速的YOLOv8推理
- 多线程处理:视频解码和推理并行执行
- 批处理:支持批量帧处理提高吞吐量
8.3.3 I/O优化
- 异步写入:视频编码采用异步写入机制
- 缓存策略:数据库查询结果缓存
- 压缩存储:输出视频采用高效编码格式
9. 系统部署与使用
9.1 环境要求
硬件要求:
- CPU:Intel i5或AMD Ryzen 5以上
- 内存:8GB RAM(推荐16GB)
- 显卡:NVIDIA GTX 1060或以上(支持CUDA)
- 存储:至少10GB可用空间
软件环境:
- 操作系统:Windows 10/11, Ubuntu 18.04+, macOS 10.15+
- Python:3.8-3.11
- CUDA:11.0+(GPU加速可选)
9.2 安装步骤
9.2.1 克隆项目
git clone https://github.com/your-repo/pedestrian-analysis-system.git
cd pedestrian-analysis-system
9.2.2 创建虚拟环境
python -m venv venv
# Windows
venv\Scripts\activate
# Linux/macOS
source venv/bin/activate
9.2.3 安装依赖
pip install -r requirements.txt
主要依赖包:
ultralytics>=8.0.0
opencv-python>=4.5.0
streamlit>=1.28.0
numpy>=1.21.0
pandas>=1.3.0
sqlite3
pillow>=8.0.0
matplotlib>=3.5.0
plotly>=5.0.0
9.3 运行系统
9.3.1 启动Web应用
cd algorithm
streamlit run streamlit_app.py
9.3.2 访问系统
- 本地访问:http://localhost:8501
- 网络访问:http://your-ip:8501
9.4 使用指南
9.4.1 基本操作流程
- 启动系统:运行Streamlit应用
- 选择功能:通过侧边栏导航选择所需功能
- 上传视频:在"行人识别"页面上传待分析视频
- 调整参数:根据需要调整置信度、IoU阈值等参数
- 开始分析:点击"开始识别"按钮启动处理
- 查看结果:在不同标签页查看处理结果和统计数据
- 下载输出:下载处理后的视频文件
9.4.2 参数调优建议
- 置信度阈值:
- 0.1-0.3:检测更多目标,可能增加误检
- 0.3-0.5:平衡检测精度和召回率
- 0.5-0.8:高精度检测,可能遗漏部分目标
- IoU阈值:
- 0.3-0.5:适用于密集场景
- 0.5-0.7:标准设置
- 0.7-0.9:适用于稀疏场景
9.5 故障排除
9.5.1 常见问题
问题1:CUDA out of memory
- 解决方案:降低batch size或使用CPU推理
问题2:视频格式不支持
- 解决方案:使用FFmpeg转换为MP4格式
问题3:处理速度慢
- 解决方案:启用GPU加速或降低视频分辨率
9.5.2 日志调试
import logging
logging.basicConfig(level=logging.INFO)
logger = logging.getLogger(__name__)
10. 项目总结与展望
10.1 技术成就
算法集成:
- 成功集成YOLOv8目标检测算法,实现高精度行人检测
- 整合ByteTrack多目标追踪算法,确保目标身份连续性
- 开发了完整的视频分析流水线,支持端到端处理
系统功能:
- 实现了实时行人检测与追踪
- 构建了智能的区域进出统计功能
- 开发了拥挤场景预警机制
- 提供了丰富的数据可视化功能
工程实现:
- 构建了用户友好的Web界面
- 实现了可靠的数据存储机制
- 优化了系统性能和用户体验
- 提供了完整的部署和使用文档
10.2 应用价值
商业应用:
- 智慧零售:商场、超市的客流分析
- 交通监控:地铁站、机场的人流管理
- 安防监控:重要场所的安全监控
- 城市规划:公共空间的使用情况分析
社会价值:
- 提升公共场所的安全管理水平
- 优化资源配置和服务质量
- 为疫情防控提供技术支撑
- 推动智慧城市建设发展
10.3 技术创新点
算法优化:
- 针对监控场景优化了检测模型
- 改进了多目标追踪的稳定性
- 设计了高效的区域统计算法
系统设计:
- 采用模块化架构,便于扩展和维护
- 实现了参数化配置,提高系统灵活性
- 集成了完整的数据管理功能
10.4 未来发展方向
技术升级:
- 实时流处理:支持RTSP/RTMP实时视频流分析
- 边缘计算:部署到边缘设备,降低延迟
- 模型压缩:优化模型大小,提高推理速度
- 多模态融合:结合音频、环境数据提升分析精度
功能扩展:
- 行为识别:检测异常行为和危险动作
- 人脸识别:结合人脸识别技术实现身份确认
- 情感分析:分析人群情绪状态
- 预测分析:基于历史数据预测人流趋势
平台化发展:
- 云服务化:提供SaaS服务模式
- API接口:开放标准化API接口
- 移动端:开发移动应用程序
- 大数据分析:集成大数据分析平台
10.5 结语
本项目成功构建了一个完整的基于YOLO的视频行人智能分析系统,实现了从算法研究到工程应用的全流程开发。系统在技术先进性、功能完整性和用户体验方面都达到了预期目标,为智能监控和人流分析领域提供了一个可靠的解决方案。
通过本项目的开发,不仅掌握了深度学习在计算机视觉领域的应用,还积累了丰富的工程实践经验。项目的成功实施证明了所采用技术路线的可行性,为后续的技术发展和产业应用奠定了坚实基础。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 17
17 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)