用C#实现发那科机器人上位机语音识别控制
发那科机器人上位机,C#,语音识别控制,FANUC在自动化控制领域,发那科(FANUC)机器人以其高精度和稳定性被广泛应用。今天咱们来聊聊如何通过C#语言开发上位机,结合语音识别技术来控制发那科机器人,这就像给机器人装上了一个“听话的耳朵”,让它能听懂我们的指令。
发那科机器人上位机,C#,语音识别控制,FANUC
在自动化控制领域,发那科(FANUC)机器人以其高精度和稳定性被广泛应用。今天咱们来聊聊如何通过C#语言开发上位机,结合语音识别技术来控制发那科机器人,这就像给机器人装上了一个“听话的耳朵”,让它能听懂我们的指令。
一、前期准备
首先,你得有FANUC机器人相关的开发包,通常FANUC会提供一系列的API,用于和机器人进行通信。另外,还需要一个语音识别库,在C#中,微软的Speech API(SAPI)是个不错的选择,它能方便地实现语音识别功能。
二、C# 语音识别代码实现
下面是一段简单的C#代码,用于初始化语音识别引擎:
using System.Speech.Recognition;
class VoiceRecognition
{
private SpeechRecognitionEngine recognizer;
public VoiceRecognition()
{
// 创建一个新的语音识别引擎实例,指定文化为英语(这里可根据实际需求更改)
recognizer = new SpeechRecognitionEngine(new System.Globalization.CultureInfo("en - US"));
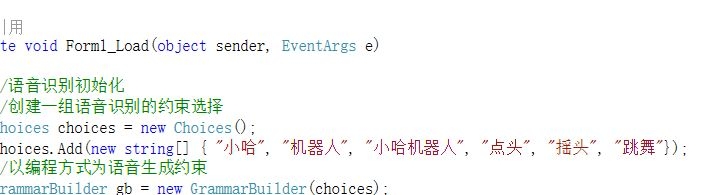
// 创建一个语法,这里简单地以一些预定义的命令为例
Choices commands = new Choices();
commands.Add(new string[] { "Move Forward", "Move Backward", "Turn Left", "Turn Right" });
GrammarBuilder grammarBuilder = new GrammarBuilder();
grammarBuilder.Append(commands);
Grammar grammar = new Grammar(grammarBuilder);
recognizer.LoadGrammar(grammar);
// 绑定识别结果事件
recognizer.SpeechRecognized += new EventHandler<SpeechRecognizedEventArgs>(recognizer_SpeechRecognized);
// 设置识别模式为听写模式
recognizer.SetInputToDefaultAudioDevice();
recognizer.RecognizeAsync(RecognizeMode.Multiple);
}
void recognizer_SpeechRecognized(object sender, SpeechRecognizedEventArgs e)
{
// 这里处理识别到的语音命令
string command = e.Result.Text;
Console.WriteLine("Recognized command: " + command);
// 在这里可以根据识别出的命令调用机器人控制方法
}
}在这段代码里,我们首先创建了一个SpeechRecognitionEngine实例,指定了语言文化。然后,定义了一些语音命令选项,通过GrammarBuilder和Grammar构建了语音识别语法。接着,给识别引擎绑定了SpeechRecognized事件,当识别到语音命令时,会触发这个事件,并在事件处理方法里获取识别到的文本内容。最后,将识别输入设置为默认音频设备,并开始异步识别。
三、与发那科机器人通信
要控制发那科机器人,就需要通过网络或者串口通信来发送指令。假设我们通过TCP/IP网络通信,下面是一个简单的与FANUC机器人建立TCP连接并发送指令的代码示例:
using System;
using System.Net.Sockets;
using System.Text;
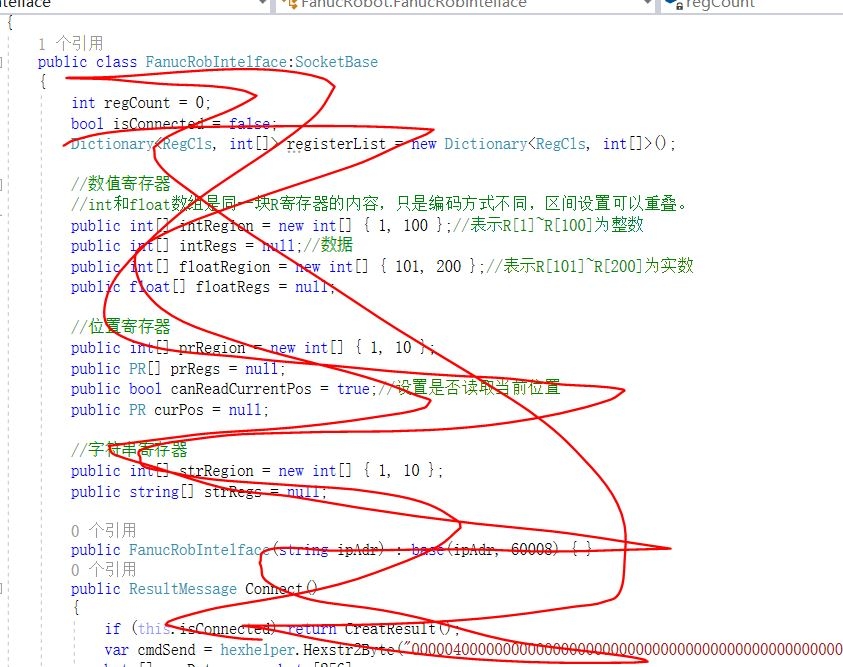
class FanucRobotCommunicator
{
private TcpClient client;
private NetworkStream stream;
public FanucRobotCommunicator(string ip, int port)
{
client = new TcpClient();
client.Connect(ip, port);
stream = client.GetStream();
}
public void SendCommand(string command)
{
byte[] data = Encoding.ASCII.GetBytes(command + "\r\n");
stream.Write(data, 0, data.Length);
byte[] response = new byte[1024];
int bytesRead = stream.Read(response, 0, response.Length);
string responseText = Encoding.ASCII.GetString(response, 0, bytesRead);
Console.WriteLine("Response from robot: " + responseText);
}
public void Disconnect()
{
stream.Close();
client.Close();
}
}在这个类中,构造函数用于与机器人指定的IP地址和端口建立TCP连接。SendCommand方法将命令字符串转换为字节数组,并通过网络流发送给机器人,同时读取机器人返回的响应信息。Disconnect方法则用于关闭连接。
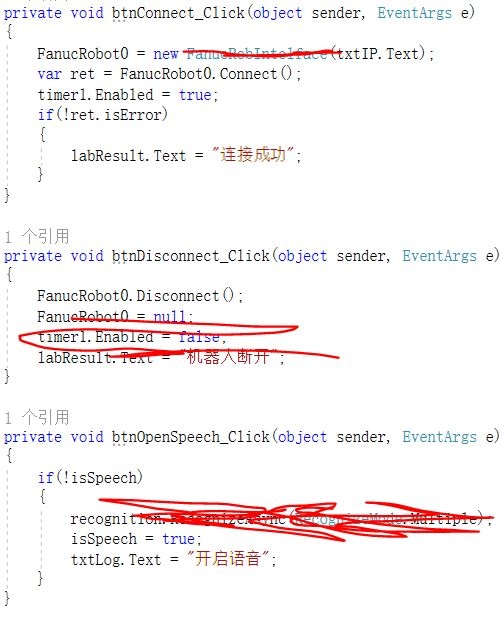
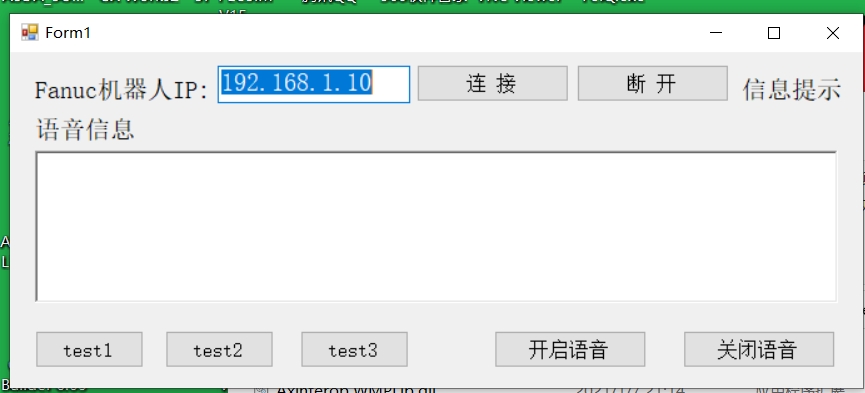
四、整合语音识别与机器人控制
最后,我们把语音识别和机器人控制整合起来,根据识别到的语音命令,发送相应的控制指令给发那科机器人。
class Program
{
static void Main()
{
VoiceRecognition voiceRecognition = new VoiceRecognition();
FanucRobotCommunicator robotCommunicator = new FanucRobotCommunicator("192.168.1.100", 8193);
// 这里可以在VoiceRecognition的SpeechRecognized事件处理方法里,根据识别的命令调用robotCommunicator.SendCommand发送指令
Console.WriteLine("Press any key to exit...");
Console.ReadKey();
robotCommunicator.Disconnect();
}
}在Main方法中,我们创建了语音识别和机器人通信的实例。在实际应用中,我们会在语音识别的SpeechRecognized事件处理方法里,根据识别到的具体命令,调用robotCommunicator.SendCommand方法向机器人发送相应的控制指令。例如,如果识别到“Move Forward”,就发送前进的控制指令给机器人。
发那科机器人上位机,C#,语音识别控制,FANUC
通过这样的方式,我们就实现了用C#开发上位机,结合语音识别来控制发那科机器人,为自动化控制带来了更便捷、智能的交互方式。当然,实际应用中还需要考虑更多的细节,比如错误处理、指令的准确性校验等等,但这篇博文希望能给你一个基础的思路和方向。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 4
4 0
0- 0



 已为社区贡献16条内容
已为社区贡献16条内容

所有评论(0)