探索 Simulink 中 LCL 型光伏逆变器双环控制与 MPPT 的奇妙之旅
simulink LCL型光伏逆变器 双环控制 Mppt采用电导增量法/扰动观察法 波形良好 适合初学者学习 附带相关课程报告(图和公式已用VISIO及公式编辑器编辑好)、参考文献
嘿,各位初学者朋友们!今天来跟大家分享一下在 Simulink 里搭建 LCL 型光伏逆变器双环控制模型,并且结合 Mppt(最大功率点跟踪)采用电导增量法或者扰动观察法的有趣项目,这个可适合咱们初学者来学习啦!
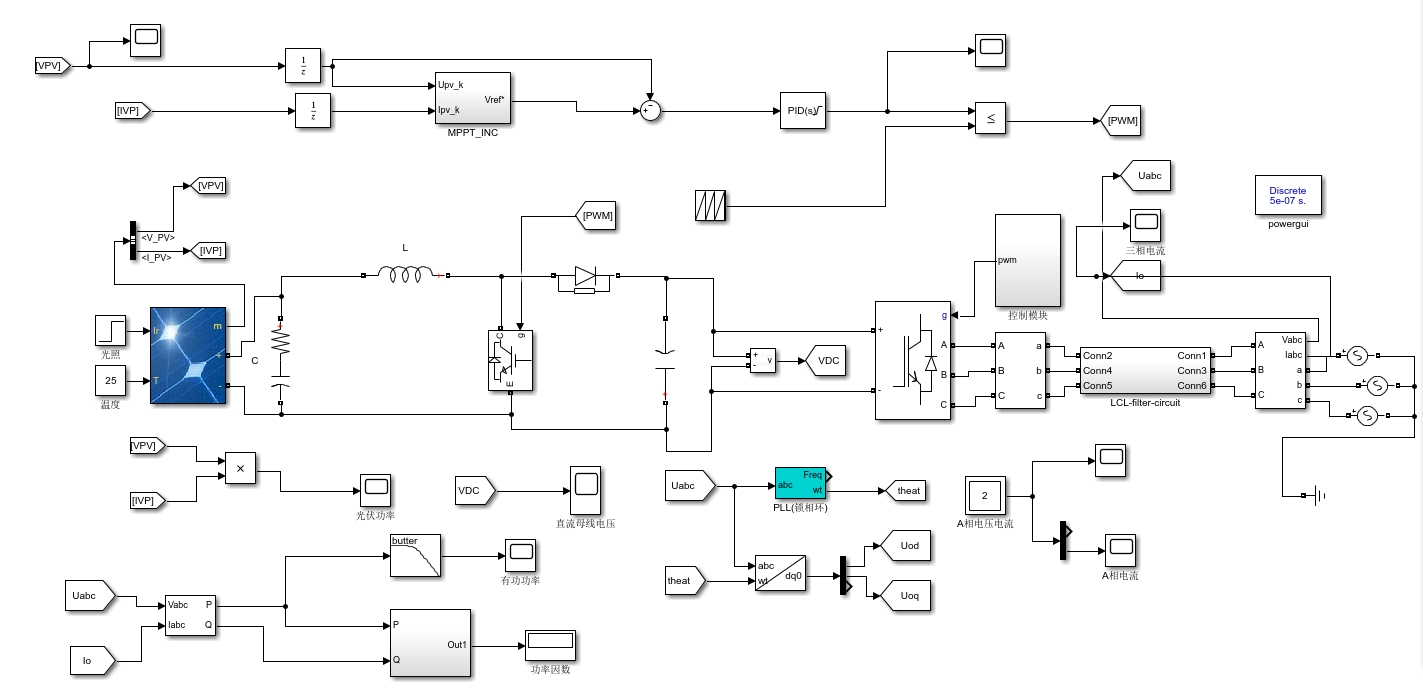
LCL 型光伏逆变器双环控制基础
在电力电子领域,LCL 型滤波器由于其在高频段良好的滤波特性,被广泛应用于光伏逆变器中。双环控制则是一种经典的控制策略,通常包含电流内环和电压外环。
电流内环
电流内环的主要作用是快速跟踪指令电流,对系统的动态响应有着关键影响。以简单的 PI 控制器为例,在 Simulink 中搭建如下代码(这里为伪代码示意,实际需在 Simulink 模块中设置参数):
% 定义 PI 控制器参数
kp_i = 0.5;
ki_i = 10;
% 电流内环控制算法
function i_control = current_loop(i_ref, i_measured, error_i_prev, integral_i)
error_i = i_ref - i_measured;
p_term = kp_i * error_i;
integral_i = integral_i + ki_i * error_i * Ts;
i_control = p_term + integral_i;
error_i_prev = error_i;
end这里 iref 是指令电流,imeasured 是实际测量电流,kpi 和 kii 分别是比例和积分系数。通过不断计算误差并调整输出,使得实际电流尽可能跟踪指令电流。
电压外环
电压外环则负责维持输出电压的稳定。同样采用 PI 控制器,代码思路类似:
% 定义 PI 控制器参数
kp_v = 0.1;
ki_v = 1;
% 电压外环控制算法
function v_control = voltage_loop(v_ref, v_measured, error_v_prev, integral_v)
error_v = v_ref - v_measured;
p_term = kp_v * error_v;
integral_v = integral_v + ki_i * error_v * Ts;
v_control = p_term + integral_v;
error_v_prev = error_v;
end这里 vref 是参考电压,vmeasured 是实际测量电压。电压外环的输出作为电流内环的指令电流,形成双环嵌套的控制结构。
MPPT 之电导增量法与扰动观察法
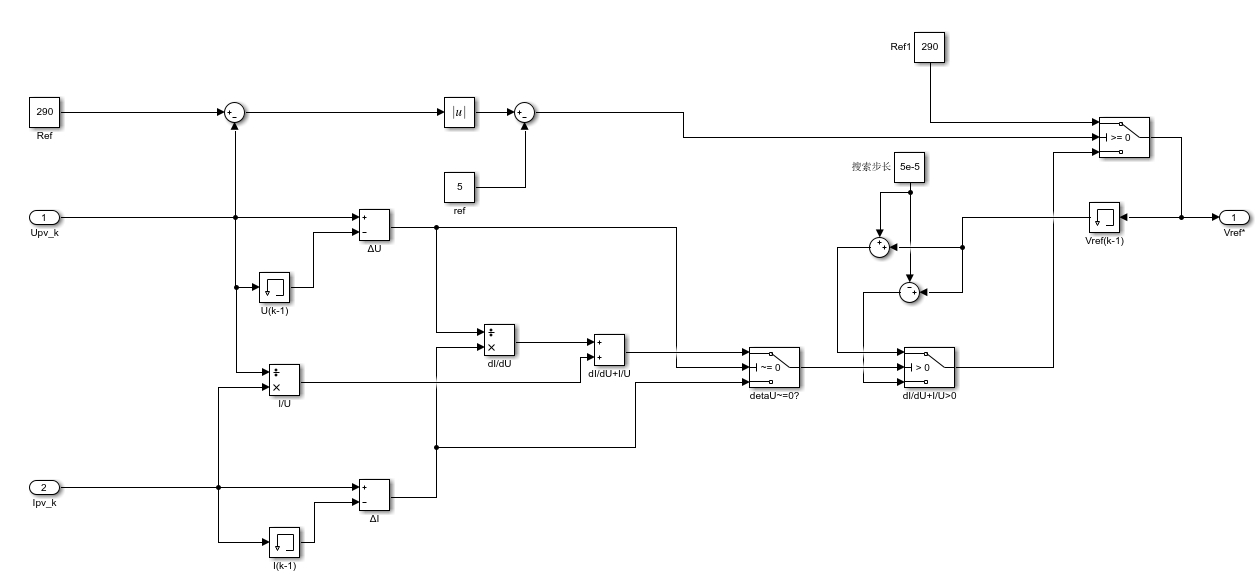
电导增量法
最大功率点跟踪(MPPT)对于光伏系统至关重要,它能让光伏板始终工作在最大功率点附近,提高发电效率。电导增量法的核心思想是通过比较光伏阵列的电导增量与瞬时电导来判断工作点与最大功率点的相对位置。
simulink LCL型光伏逆变器 双环控制 Mppt采用电导增量法/扰动观察法 波形良好 适合初学者学习 附带相关课程报告(图和公式已用VISIO及公式编辑器编辑好)、参考文献
在 Simulink 中的实现思路大概如下(同样为伪代码):
% 光伏阵列参数
Isc = 5;
Voc = 36;
% 电导增量法 MPPT 算法
function [duty_cycle] = inccond_mppt(V, I, V_prev, I_prev)
dI = I - I_prev;
dV = V - V_prev;
G = I / V;
dG = dI / dV;
if dG + G < 0
duty_cycle = duty_cycle + step_size;
else
duty_cycle = duty_cycle - step_size;
end
V_prev = V;
I_prev = I;
end这里通过不断测量电压 V 和电流 I,计算电导增量 dG 和瞬时电导 G,根据比较结果调整占空比 duty_cycle,从而使光伏板工作在最大功率点附近。
扰动观察法
扰动观察法相对来说更直观一些。它通过周期性地扰动光伏阵列的工作点,观察功率变化方向,进而调整工作点向最大功率点移动。
% 扰动观察法 MPPT 算法
function [duty_cycle] = p&o_mppt(V, I, duty_cycle_prev, power_prev)
power = V * I;
if power > power_prev
if dV > 0
duty_cycle = duty_cycle_prev + step_size;
else
duty_cycle = duty_cycle_prev - step_size;
end
else
if dV > 0
duty_cycle = duty_cycle_prev - step_size;
else
duty_cycle = duty_cycle_prev + step_size;
end
end
power_prev = power;
duty_cycle_prev = duty_cycle;
end通过比较当前功率 power 和上一时刻功率 power_prev,结合电压变化 dV 来调整占空比,不断逼近最大功率点。
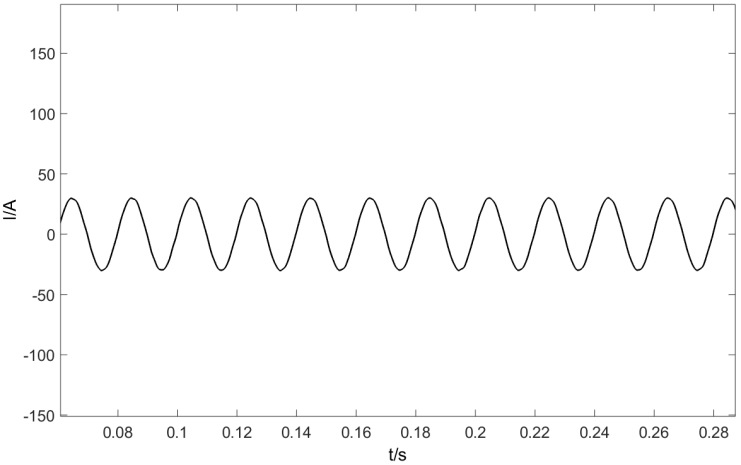
最终成果:良好波形展示
当我们在 Simulink 中成功搭建好 LCL 型光伏逆变器双环控制结合 MPPT 的模型后,运行仿真,就能得到非常良好的波形啦。比如光伏板输出电压、电流波形稳定,逆变器输出的交流电压波形正弦度良好,这就说明我们的控制策略起到了应有的作用。
而且,我这里还附带了相关课程报告哦,里面的图和公式都是用 VISIO 及公式编辑器精心编辑好的,还有详细的参考文献,方便大家进一步深入学习。希望大家都能从这个项目中收获满满,在电力电子和 Simulink 的学习道路上越走越远!

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 16
16 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)