基于Matlab/Simulink的插电式混合动力汽车四驱PHEV建模与仿真:比亚迪唐DM混动...
这个基于Matlab/Simulink的PHEV模型不仅能够帮助你理解混动系统的工作原理,还能为你的论文提供丰富的数据支持。如果你对混动控制建模感兴趣,这个模型绝对是一个不错的起点。希望这篇文章能帮到你,玩转Simulink,轻松搞定混动汽车建模!
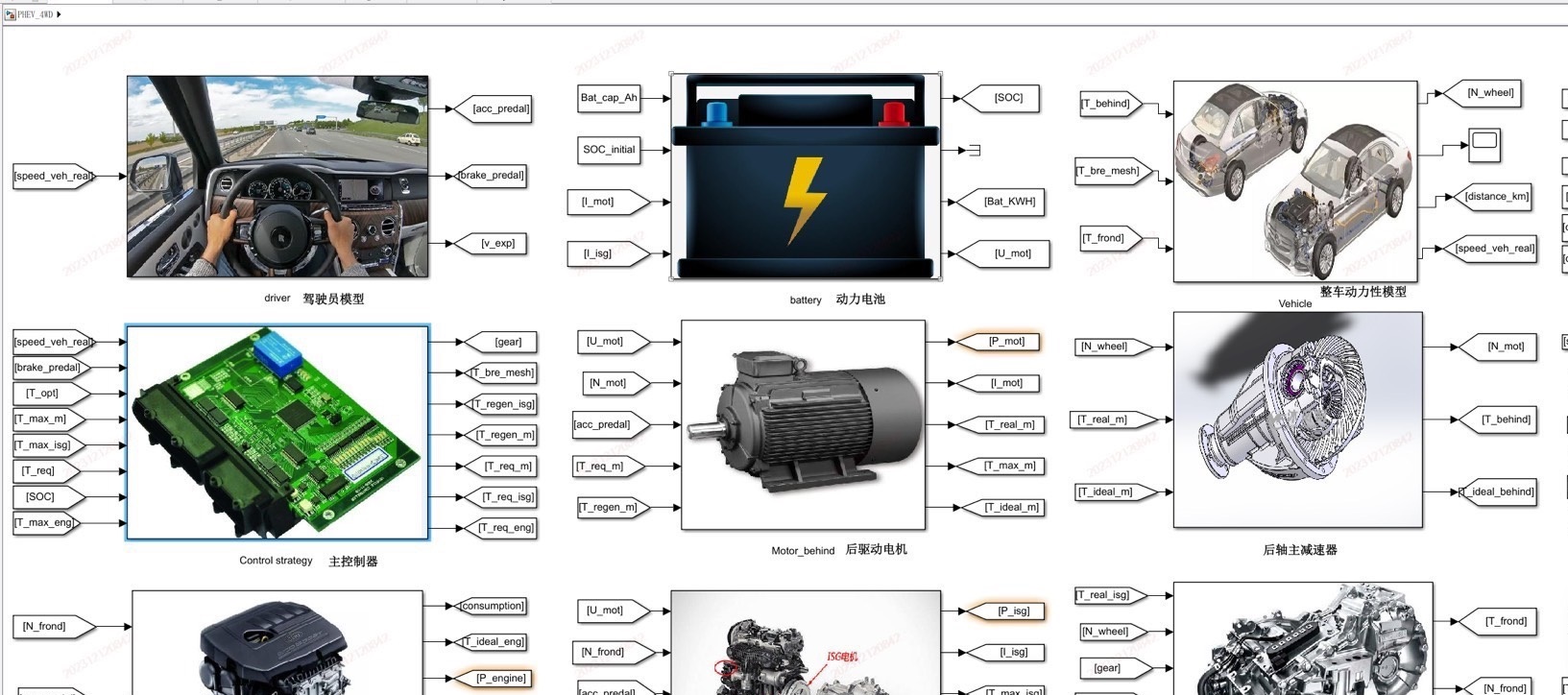
基于Matlab/simulink的插电式混合动力汽车建模仿真模型4驱PHEV(比亚迪唐DM混动系统P2P4发动机——三擎四驱),包括整车HCU控制单元、发动机模型、驱动电机模型、ISG电机模型、AMT5档自动变速箱模型、驾驶员模型、电池能量管理控制模型等,建模详细清晰 基于模型的整车策略开发思路、整车模型搭建流程(从最初输入输出确定——最后整个模型建立全过程) 相当于手把手教学,新能源混动控制建模方面相关需求人才强烈推荐,教你玩转基于simulink的混动汽车建模开发流程 ——此模型为本人研究生阶段开发的,纯手工搭建(与比亚迪唐超级混动系统DM二代构型一摸一样),全网独一份,数据齐全,可直接仿真出结果(不能仿真不收费),整车构型传动结构下图已展示,整车能量管理策略很直观,方便学习 ——仿真结果:发动机工作扭矩,电机工作扭矩,电池SOC变化,电池能量变化,电池电流变化,车速跟随变化,燃油消耗变化,累计行驶距离结果,整车工作模式变化等等结果全部都有 ——看懂之后,可直接出论文绝对没问题(提供工况数据,发动机、电机等整车数据)
最近在研究插电式混合动力汽车(PHEV)的建模与仿真,尤其是基于Matlab/Simulink的整车模型搭建。今天就来分享一下我研究生阶段开发的比亚迪唐DM混动系统P2P4发动机——三擎四驱的仿真模型。这个模型完全手工搭建,数据齐全,仿真结果直观,适合想深入理解混动系统的小伙伴。
整车模型架构
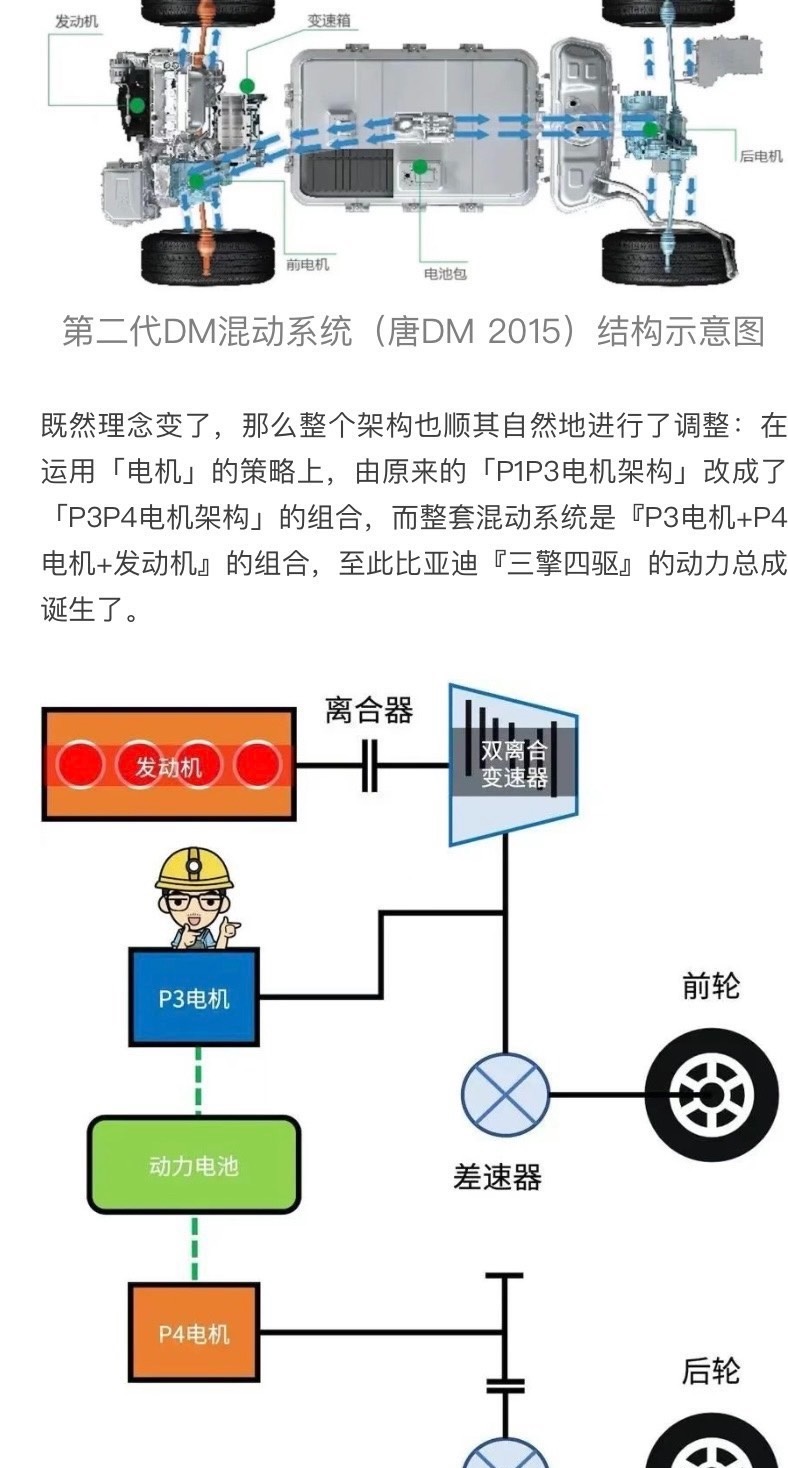
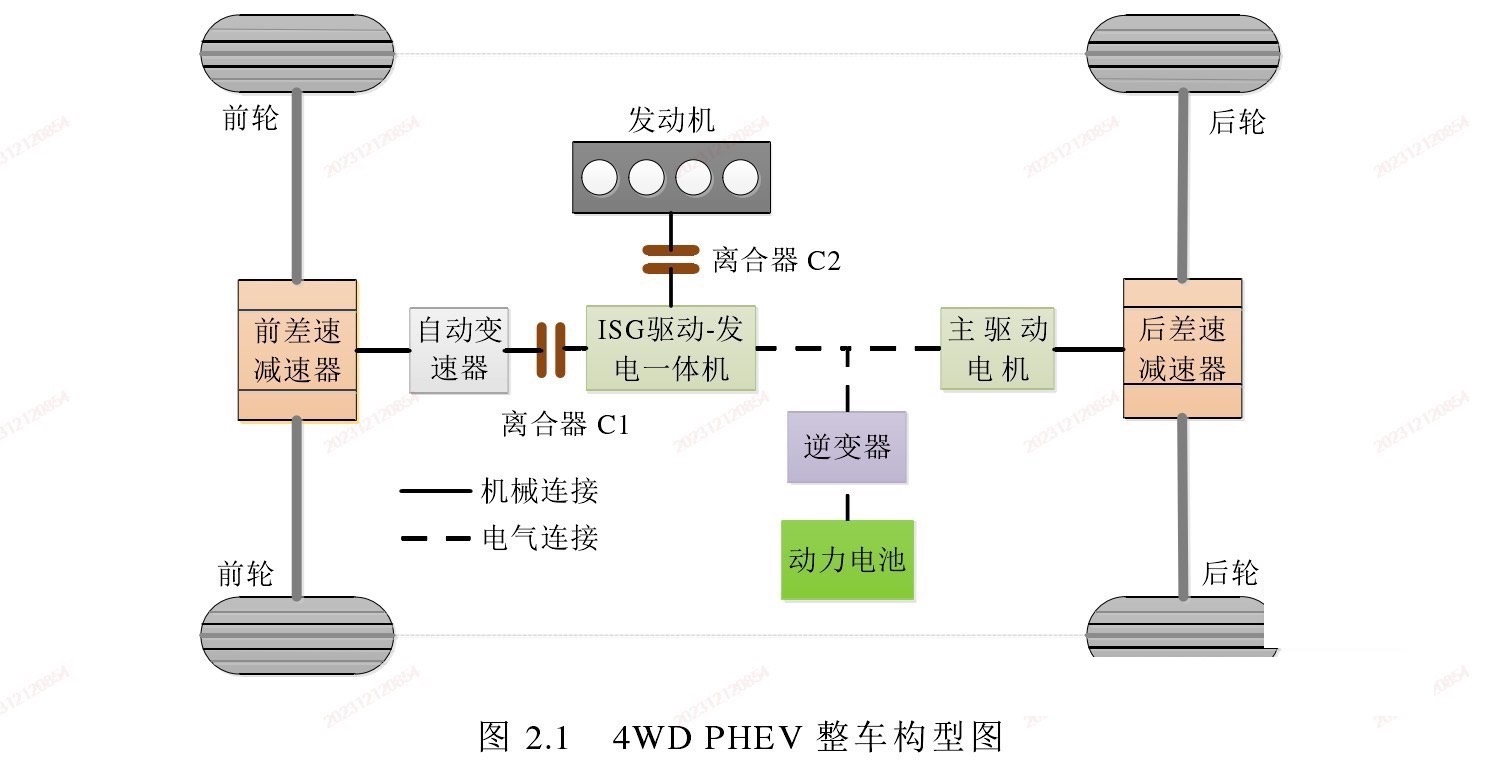
首先,我们来看一下整车的构型。比亚迪唐DM采用的是P2P4发动机布局,也就是前轴由发动机和ISG电机驱动,后轴由驱动电机驱动。这种三擎四驱的布局在混动系统中算是比较复杂的,但它的优势在于能够灵活切换工作模式,实现高效的能量管理。
模型搭建流程
1. 确定输入输出
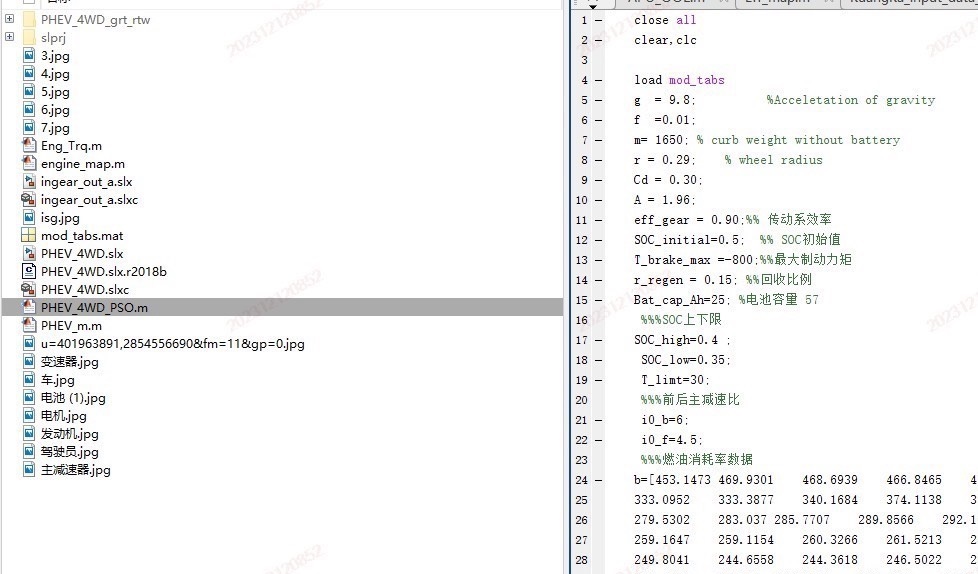
建模的第一步是明确模型的输入和输出。对于PHEV来说,输入通常包括驾驶员的加速踏板信号、制动踏板信号、车速需求等。输出则包括发动机扭矩、电机扭矩、电池SOC、车速、燃油消耗等。
% 输入信号
accelerator_pedal = 0.5; % 加速踏板信号
brake_pedal = 0; % 制动踏板信号
speed_demand = 60; % 车速需求 (km/h)2. 整车HCU控制单元
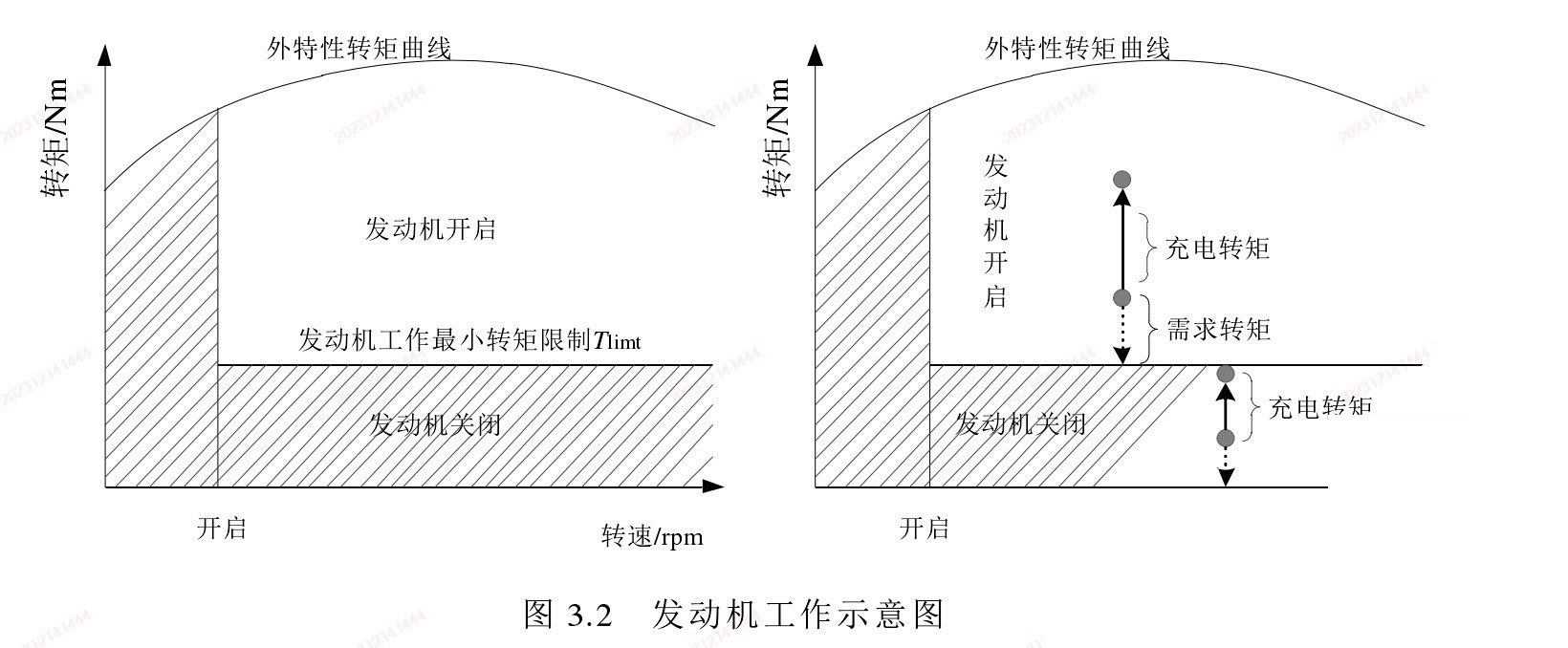
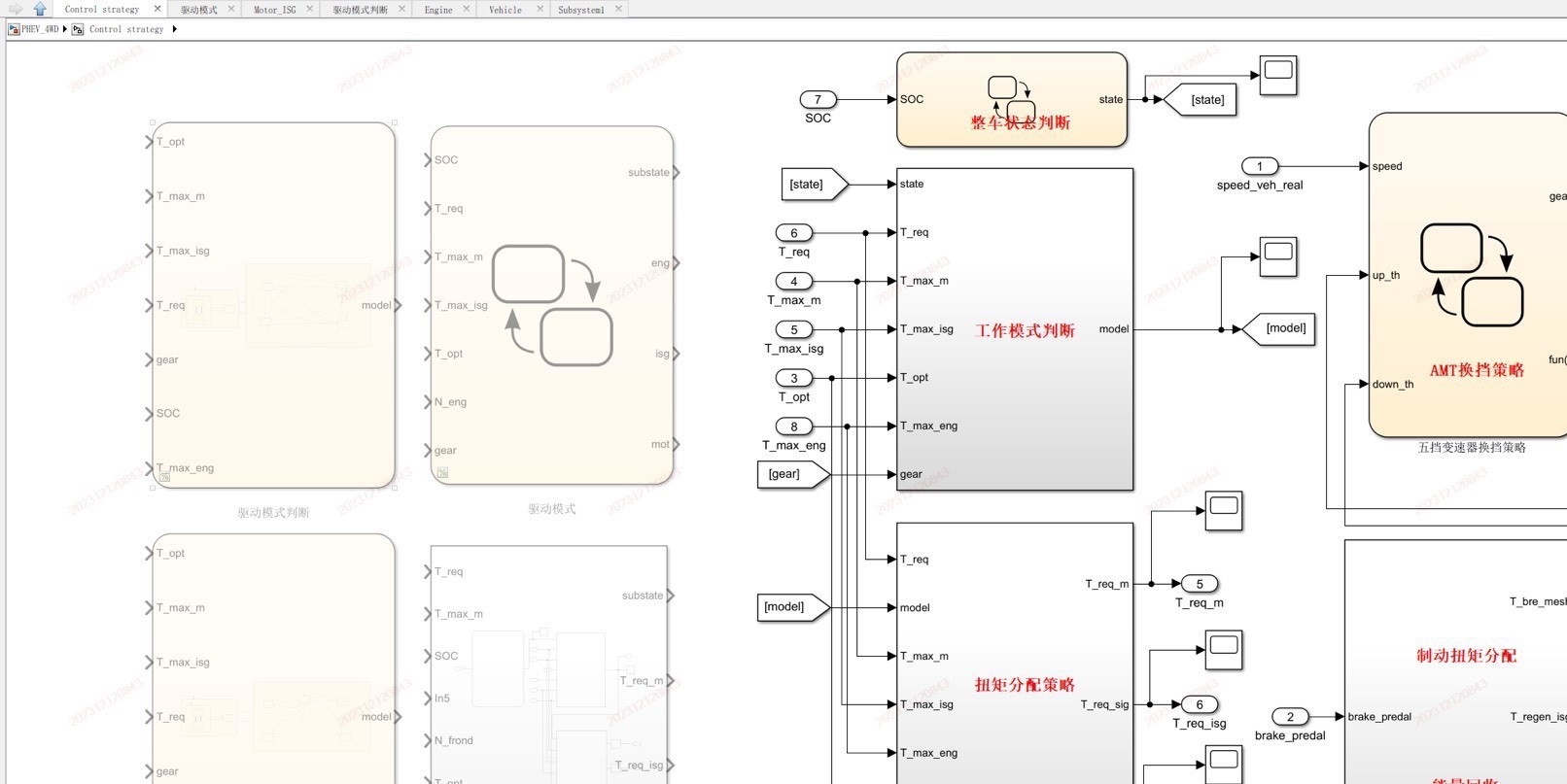
HCU(Hybrid Control Unit)是整车的“大脑”,负责协调发动机、电机、电池等部件的工作。HCU的核心是能量管理策略,它决定了在不同工况下如何分配动力。
% HCU控制策略
if speed_demand < 40
mode = 'EV'; % 纯电模式
else
mode = 'HEV'; % 混动模式
end3. 发动机模型
发动机模型是整车模型的重要组成部分。我们采用了一个简化的发动机模型,输入为油门开度,输出为发动机扭矩。
% 发动机模型
function engine_torque = engine_model(throttle)
max_torque = 200; % 最大扭矩 (Nm)
engine_torque = throttle * max_torque;
end4. 驱动电机模型
驱动电机模型与发动机模型类似,输入为电机需求扭矩,输出为实际扭矩。
% 驱动电机模型
function motor_torque = motor_model(torque_demand)
max_torque = 150; % 最大扭矩 (Nm)
motor_torque = min(torque_demand, max_torque);
end5. ISG电机模型
ISG电机(Integrated Starter Generator)主要用于启动发动机和发电。它的模型与驱动电机类似,但功率较小。
% ISG电机模型
function isg_torque = isg_model(torque_demand)
max_torque = 50; % 最大扭矩 (Nm)
isg_torque = min(torque_demand, max_torque);
end6. AMT5档自动变速箱模型
AMT(Automated Manual Transmission)模型负责模拟变速箱的换挡逻辑。我们采用了一个简单的5档变速箱模型。
% AMT变速箱模型
function gear = amt_model(speed)
if speed < 20
gear = 1;
elseif speed < 40
gear = 2;
elseif speed < 60
gear = 3;
elseif speed < 80
gear = 4;
else
gear = 5;
end
end7. 驾驶员模型
驾驶员模型模拟了驾驶员的操作行为,包括加速、制动等。
% 驾驶员模型
function [acc_pedal, brake_pedal] = driver_model(speed_demand, current_speed)
if current_speed < speed_demand
acc_pedal = 0.7;
brake_pedal = 0;
else
acc_pedal = 0;
brake_pedal = 0.3;
end
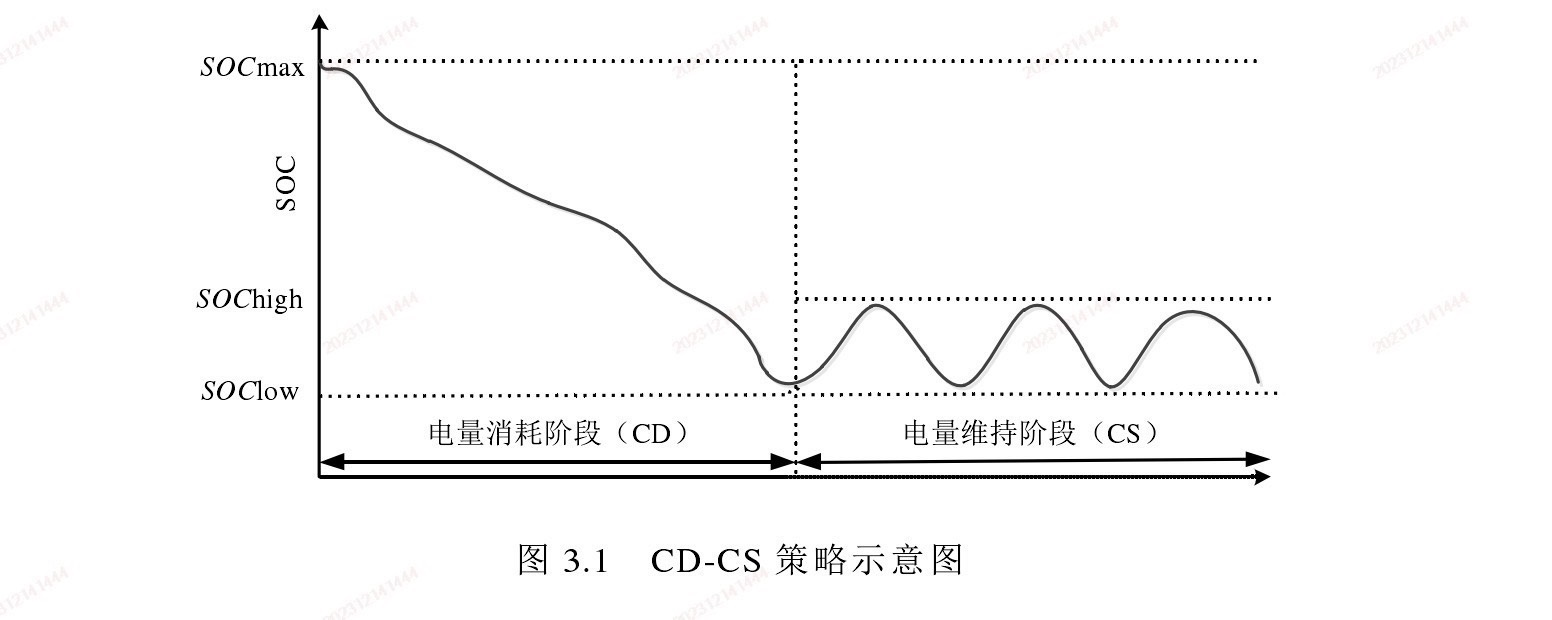
end8. 电池能量管理控制模型
电池模型是PHEV的核心之一,它负责管理电池的充放电过程。我们采用了一个简化的电池模型,输入为电流,输出为SOC。
% 电池模型
function soc = battery_model(current, dt)
capacity = 20; % 电池容量 (Ah)
initial_soc = 0.8; % 初始SOC
soc = initial_soc - (current * dt) / (capacity * 3600);
end仿真结果
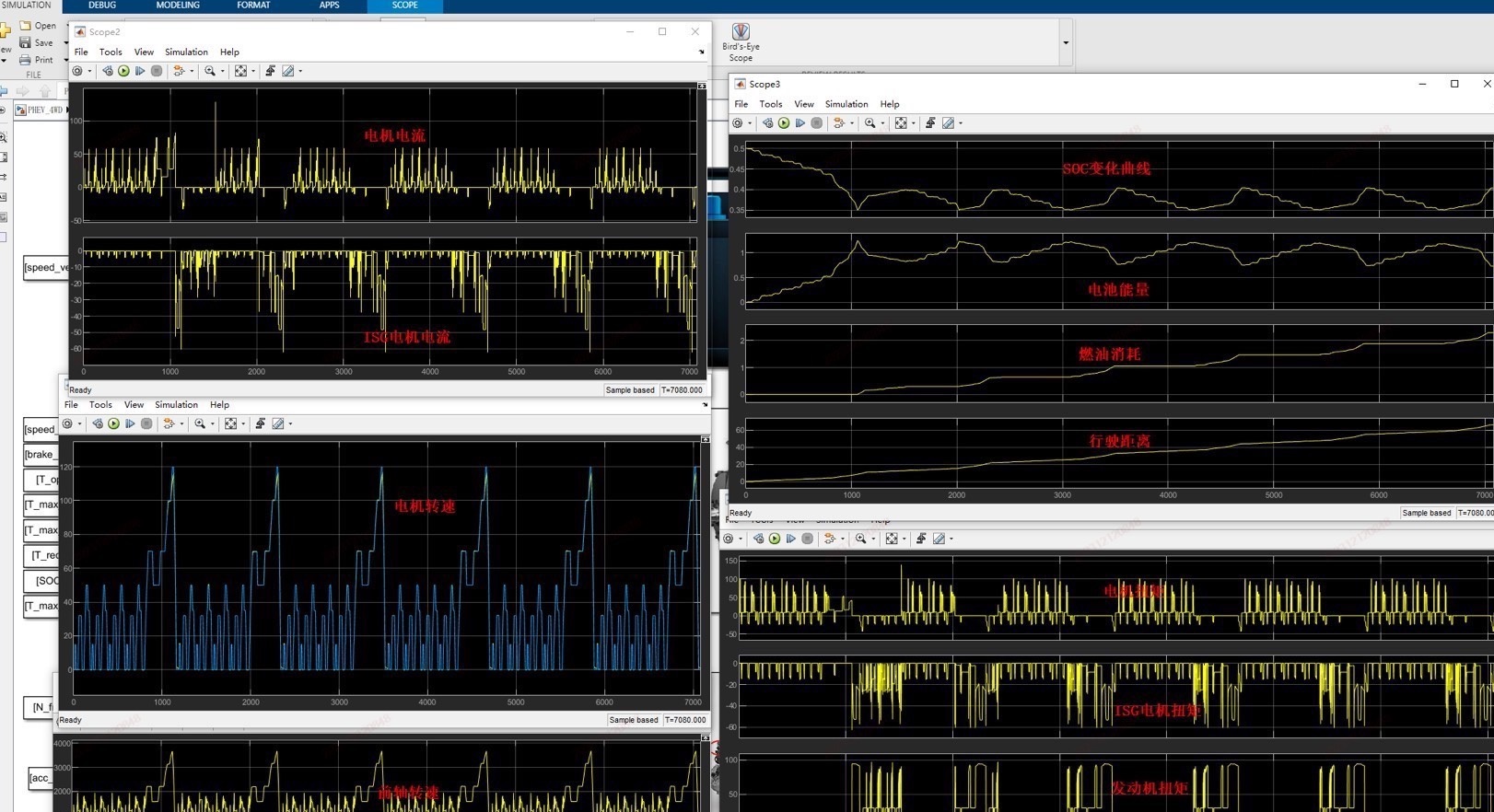
通过上述模型的搭建,我们可以得到一系列的仿真结果,包括发动机工作扭矩、电机工作扭矩、电池SOC变化、车速跟随变化、燃油消耗变化等。这些结果对于分析整车的能量管理策略非常有帮助。
% 仿真结果
engine_torque = engine_model(accelerator_pedal);
motor_torque = motor_model(torque_demand);
soc = battery_model(current, dt);总结
这个基于Matlab/Simulink的PHEV模型不仅能够帮助你理解混动系统的工作原理,还能为你的论文提供丰富的数据支持。如果你对混动控制建模感兴趣,这个模型绝对是一个不错的起点。希望这篇文章能帮到你,玩转Simulink,轻松搞定混动汽车建模!
基于Matlab/simulink的插电式混合动力汽车建模仿真模型4驱PHEV(比亚迪唐DM混动系统P2P4发动机——三擎四驱),包括整车HCU控制单元、发动机模型、驱动电机模型、ISG电机模型、AMT5档自动变速箱模型、驾驶员模型、电池能量管理控制模型等,建模详细清晰 基于模型的整车策略开发思路、整车模型搭建流程(从最初输入输出确定——最后整个模型建立全过程) 相当于手把手教学,新能源混动控制建模方面相关需求人才强烈推荐,教你玩转基于simulink的混动汽车建模开发流程 ——此模型为本人研究生阶段开发的,纯手工搭建(与比亚迪唐超级混动系统DM二代构型一摸一样),全网独一份,数据齐全,可直接仿真出结果(不能仿真不收费),整车构型传动结构下图已展示,整车能量管理策略很直观,方便学习 ——仿真结果:发动机工作扭矩,电机工作扭矩,电池SOC变化,电池能量变化,电池电流变化,车速跟随变化,燃油消耗变化,累计行驶距离结果,整车工作模式变化等等结果全部都有 ——看懂之后,可直接出论文绝对没问题(提供工况数据,发动机、电机等整车数据)

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 6
6 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)