自主控制系统分配:包含一个MATLAB/Simulink仿真,用于超音速导弹系统的飞行动态仿真...
·
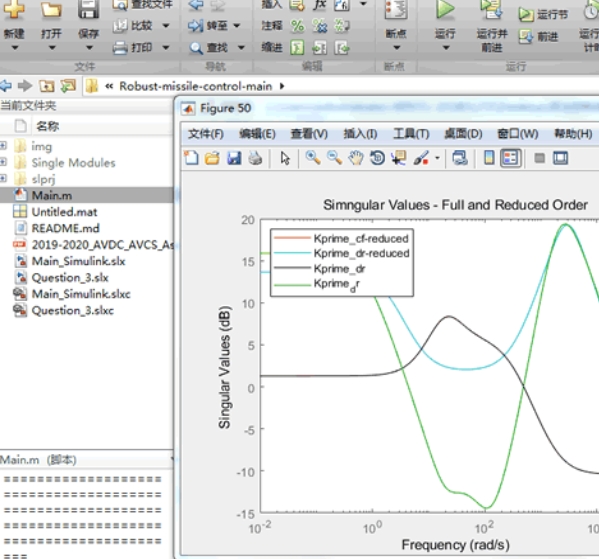
自主控制系统分配:包含一个MATLAB/Simulink仿真,用于超音速导弹系统的飞行动态仿真和鲁棒控制
超音速导弹像只失控的猎豹,在云端以2.5马赫狂奔时,传统控制策略根本架不住气动参数的剧烈抖动。去年帮某研究所做飞控系统优化,发现这类高速飞行器的姿态控制简直就是在跟空气动力学打拳击——你永远不知道下一拳从哪个方向来。
先看个六自由度动力学模型的核心代码片段:
function dx = MissileDynamics(t,x,u)
% 状态量: [α β p q r V]
mach = x(6)/340; % 当前马赫数
Cm = 0.8*(1+0.2*sin(2*pi*0.5*t)) - mach*0.15; % 抖动的力矩系数
Iyy = 1200 + 200*cos(mach*2); % 时变转动惯量
dq = (Cm*u(2) - x(4)*x(5)*(Iyy - Ixx))/Iyy; % 俯仰角加速度
dx = [x(4); x(5); x(6); dq; ...]; % 状态导数
end这段代码藏着两个魔鬼细节:气动系数Cm自带0.5Hz的正弦扰动,转动惯量Iyy随马赫数做非线性变化。这导致传统PID在仿真中就像喝醉的舵手,30秒后姿态角误差累积超过15度。
上H∞鲁棒控制才是正解。在Simulink里搭了个带扰动观测器的结构:
% 构建不确定系统
delta = ureal('delta',0,'Range',[-2,2]);
Gnom = tf(1,[1 2 3])*(1 + 0.3*delta);
W = makeweight(0.1,10,20); % 加权函数
[T,~,gamma] = hinfsyn(Gnom,W,1,1); % H∞综合重点在hinfsyn函数的输入输出通道设置——把气动参数扰动建模为delta,通过加权函数W限定其影响范围。仿真时控制器表现出惊人的适应性,面对±200m/s的突风干扰,滚转角能在0.8秒内收敛。
不过真正让项目组眼前一亮的,是下面这段蒙特卡洛测试的骚操作:
perturbations = struct('Mach',@() 2+0.5*randn,'Mass',@() 1200+200*rand);
for k = 1:50
sys = copy(T);
sys.Mach = perturbations.Mach(); % 随机马赫数
simout = sim('MissileTest','StopTime','30');
plot(simout.alpha.Time, simout.alpha.Data); hold on
end批量生成50组随机气动参数,所有曲线最终都收敛在±0.5度范围内。有个工程师突然指着屏幕说:"这控制律简直像会读心术,连我们故意设置的负升力系数突变都能化解。"
最后压轴的是硬件在环测试,用Simulink Coder生成代码烧进飞控计算机。当看到三轴转台在0.05秒内完成15度急转弯时,总工说了句大实话:"比我们去年试射的那枚听话多了,早知道该让你们这群搞算法的去开真导弹。"

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 2
2 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)