西门子S7 - 1200 PLC与KTP700触摸屏控制步进电机程序开发
西门子S7-1200PLC和KTP700触摸屏控制步进程序 西门子S7-1200PLC和KTP700触摸屏控制步进电机运动控制程序3; 博途V13.1 可以实现步进电机的正转、反转控制,相对和绝对位置运动,显示电机的当前位置、速度和运行状态
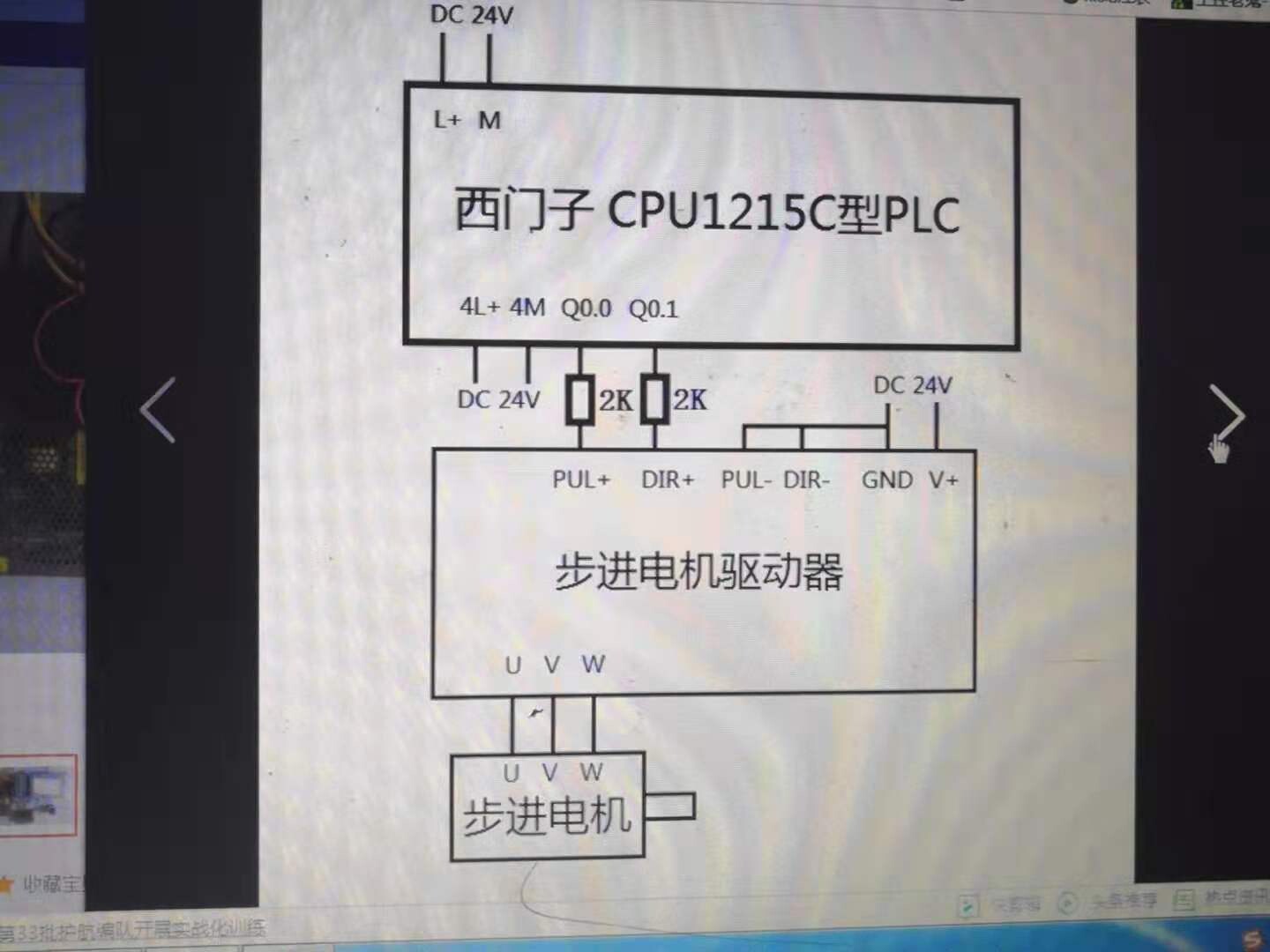
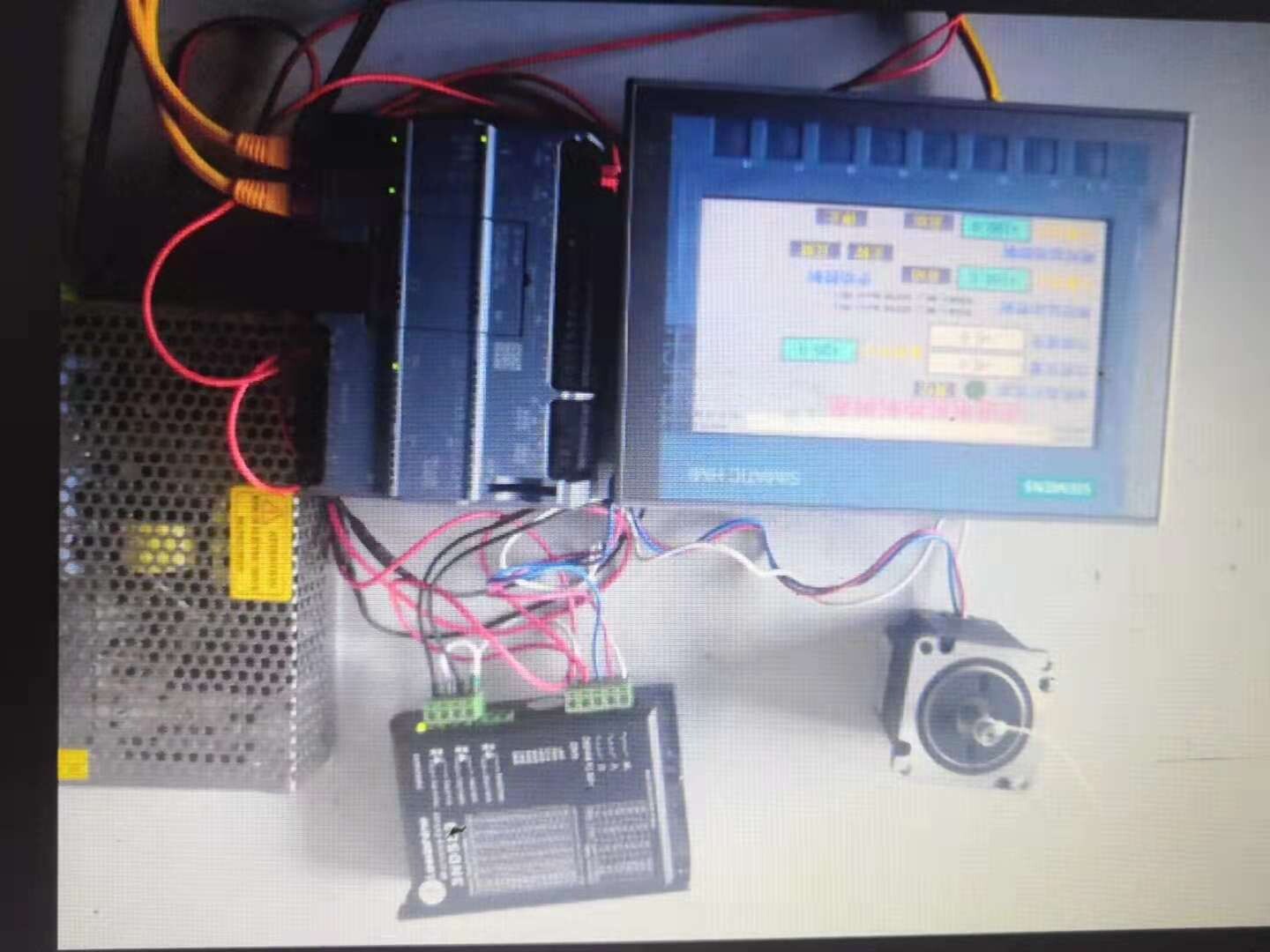
在自动化控制领域,步进电机以其精确的位置控制和稳定的运行特性被广泛应用。结合西门子S7 - 1200 PLC和KTP700触摸屏,我们能够打造出一个功能强大且操作便捷的步进电机控制系统。本次使用的开发工具为博途V13.1 。
一、功能概述
该系统旨在实现步进电机的正转、反转控制,同时支持相对和绝对位置运动。并且,能够实时显示电机的当前位置、速度以及运行状态,为操作人员提供直观的信息反馈。
二、PLC编程实现
1. 正反转控制
在S7 - 1200 PLC中,我们可以通过编写逻辑来控制步进电机的正反转。以LAD(梯形图)语言为例:
// 正转控制
A "Start_Forward" // 假设Start_Forward为触摸屏上正转启动按钮对应的变量
= "Motor_Forward" // Motor_Forward连接到控制步进电机正转的输出点
// 反转控制
A "Start_Backward" // Start_Backward为触摸屏上反转启动按钮对应的变量
= "Motor_Backward" // Motor_Backward连接到控制步进电机反转的输出点这里通过对按钮信号的逻辑判断,决定是否输出正转或反转的控制信号给步进电机驱动器。
2. 相对与绝对位置运动
对于相对位置运动,我们需要设定一个位移量,PLC根据这个量来控制电机运行。
// 相对位置运动指令示例(假设使用MC_MoveRelative指令)
MC_MoveRelative(
Axis := "Axis_1", // 定义控制的轴
Distance := #Relative_Distance, // #Relative_Distance为设定的相对位移量变量
Velocity := #Velocity, // #Velocity为设定速度变量
OverV := 100,
OverAcc := 100,
OverDec := 100,
CancelTraversing := FALSE,
Interrupt := FALSE,
Done => "Relative_Done",
Error => "Relative_Error",
ErrorID => "Relative_ErrorID"
);在这段代码中,MCMoveRelative指令根据设定的相对位移量#RelativeDistance和速度#Velocity来控制名为Axis1的轴运动。执行完成后,RelativeDone会置位表示完成,若有错误,RelativeError会置位并通过RelativeErrorID显示错误代码。
而绝对位置运动则是根据设定的目标绝对位置来控制电机。
// 绝对位置运动指令示例(假设使用MC_MoveAbsolute指令)
MC_MoveAbsolute(
Axis := "Axis_1",
Position := #Absolute_Position, // #Absolute_Position为设定的绝对位置变量
Velocity := #Velocity,
OverV := 100,
OverAcc := 100,
OverDec := 100,
CancelTraversing := FALSE,
Interrupt := FALSE,
Done => "Absolute_Done",
Error => "Absolute_Error",
ErrorID => "Absolute_ErrorID"
);这里MCMoveAbsolute指令依据设定的绝对位置#AbsolutePosition和速度#Velocity使轴运动到指定的绝对位置。同样,通过AbsoluteDone、AbsoluteError和Absolute_ErrorID来反馈执行状态和错误信息。
三、KTP700触摸屏设置
在KTP700触摸屏上,我们需要创建操作界面。首先,添加正转、反转按钮,并分别与PLC中的StartForward和StartBackward变量关联。
西门子S7-1200PLC和KTP700触摸屏控制步进程序 西门子S7-1200PLC和KTP700触摸屏控制步进电机运动控制程序3; 博途V13.1 可以实现步进电机的正转、反转控制,相对和绝对位置运动,显示电机的当前位置、速度和运行状态
对于显示电机当前位置、速度和运行状态,在触摸屏上创建相应的文本显示区域,并与PLC中存储这些信息的变量进行绑定。例如,电机当前位置变量为CurrentPosition,在触摸屏上设置文本框,将其数据源指向CurrentPosition,这样就能实时显示电机位置。
通过以上在博途V13.1中对西门子S7 - 1200 PLC和KTP700触摸屏的编程与设置,我们就成功构建了一个可以灵活控制步进电机多种运动模式并实时反馈信息的系统。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 3
3 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)