图像边缘检测算法全景解析
本文系统阐述了图像边缘检测的核心算法与实现原理。首先从数学基础出发,分析了一阶梯度(Sobel、Scharr)和二阶梯度(Laplacian)两种检测策略的本质差异。重点剖析了Canny边缘检测器的四步流程:高斯模糊降噪、梯度计算、非极大值抑制和双阈值连接,展示了其模拟人类视觉特性的设计哲学。通过对比实验揭示了各算法在边缘连续性、抗噪性等方面的性能差异,并提供了参数调优的实用建议。文章最后通过Py
·
文章目录
一、顶层架构:边缘检测的本质
1.1 数学基础:从连续到离散
连续空间:边缘 = 亮度函数的突变点
↓ 离散化
数字图像:边缘 = 相邻像素的剧烈变化
↓ 数学工具
微分/差分 ≈ 变化率
1.2 检测策略的两大分支
图像边缘检测 → 两种核心思路
├── 基于一阶梯度:寻找"坡度最大值"
│ ├── 物理意义:地形中最陡峭处
│ └── 代表:Sobel、Scharr → Canny
│
└── 基于二阶梯度:寻找"坡度变化零点"
├── 物理意义:从陡变缓的转折点
└── 代表:Laplacian
二、一阶梯度方法:寻找最大变化率
2.1 核心原理
第一性原理:f'(x) ≈ Δf/Δx ≈ 相邻像素差值
数值实现:卷积核滑动计算
关键输出:梯度幅值(陡峭程度) + 梯度方向(边缘朝向)
2.2 Sobel 算子:平衡的艺术
演进逻辑:
简单差分[-1, 1] → 噪声敏感 → 需要平滑
↓
Sobel核设计:
Gx = [[-1, 0, 1], Gy = [[-1, -2, -1],
[-2, 0, 2], [ 0, 0, 0],
[-1, 0, 1]] [ 1, 2, 1]]
设计智慧:
1. 中心行/列权重×2 → 差分+垂直方向平滑
2. 3×3窗口 → 局部平均降噪
3. 分离性 → 计算高效
2.3 Scharr 算子:旋转对称性优化
Sobel的局限:对角边缘响应不足
↓
Scharr改进:
Gx = [[-3, 0, 3], Gy = [[-3, -10, -3],
[-10,0, 10], [ 0, 0, 0],
[-3, 0, 3]] [ 3, 10, 3]]
优化点:
1. 更大的中心权重(10 vs 2)
2. 更好的旋转对称性
3. 45°方向误差减少30-50%
三、二阶梯度方法:Laplacian 的得与失
3.1 数学本质
连续Laplacian:∇²f = ∂²f/∂x² + ∂²f/∂y²
离散近似:4-邻域核 [[0,1,0],[1,-4,1],[0,1,0]]
或8-邻域核 [[1,1,1],[1,-8,1],[1,1,1]]
3.2 关键特性分析
优点:
1. 各向同性 → 旋转不变,所有方向同等对待
2. 零交叉定位 → 理论上边缘定位更精确
3. 无方向性 → 无需计算梯度方向
致命缺点:噪声放大效应
二阶微分 → 对高频分量加倍响应
↓
噪声被严重放大
↓
需要先进行强力平滑
3.3 实际应用形式
为解决噪声问题,实际常用:
1. Laplacian of Gaussian (LoG)
高斯平滑 + Laplacian → 先降噪再求二阶导
2. Difference of Gaussians (DoG)
两个不同σ的高斯核差值 → LoG的近似但更高效
四、集大成者:Canny 边缘检测器
4.1 设计哲学:模拟人类视觉
人类视觉特性 → Canny对应步骤
1. 自动降噪 → 高斯模糊
2. 对比度增强 → 梯度计算
3. 轮廓细化 → 非极大值抑制
4. 感知连续性 → 双阈值连接
4.2 四步流程详解
步骤 1:高斯模糊 - 噪声防火墙
核函数:G(x,y) = (1/(2πσ²))·exp(-(x²+y²)/(2σ²))
σ选择:平衡平滑与定位精度
小σ(0.5-1.5) → 细节保留好,噪声抑制弱
大σ(1.5-3.0) → 噪声抑制强,边缘模糊
步骤 2:梯度计算 - 变化率测量
可选用算子:
| 精度 | 抗噪性 | 计算量 | 适用场景
Sobel | 中 | 良 | 低 | 实时应用
Scharr | 高 | 良 | 中 | 高精度需求
步骤 3:非极大值抑制 - 边缘细化
算法流程:
for 每个像素点p:
1. 获取梯度方向θ
2. 沿θ方向找到两个相邻像素q,r
3. if p的梯度值 < q或r的梯度值:
将p抑制为0(非边缘)
else:
保留p为候选边缘点
方向离散化(典型实现):
0° → 水平方向比较
45° → 对角线比较
90° → 垂直方向比较
135° → 另一对角线比较
步骤 4:双阈值滞后连接 - 智能决策
阈值设定原则:
高阈值Thigh ≈ 图像梯度幅值直方图的前30%
低阈值Tlow ≈ 0.4-0.5 × Thigh
连接算法伪代码:
1. 初始化: strong_edges = [], weak_edges = []
2. 第一次扫描:
if 梯度值 > Thigh: 标记为强边缘,加入strong_edges
elif 梯度值 > Tlow: 标记为弱边缘,加入weak_edges
else: 标记为非边缘
3. 第二次扫描(连接):
for 每个弱边缘像素p:
if p的8邻域中存在强边缘像素:
将p升级为强边缘
else:
将p降级为非边缘
五、算法对比与选择指南
5.1 性能比较矩阵
| 算法/特性 | 边缘连续性 | 抗噪性 | 定位精度 | 计算复杂度 | 单像素宽 |
|---|---|---|---|---|---|
| Sobel | 差 | 中 | 中 | 低 | 否 |
| Scharr | 差 | 中 | 高 | 中 | 否 |
| Laplacian | 差 | 差 | 高(理论) | 低 | 是 |
| Canny | 优 | 优 | 高 | 高 | 是 |
5.2 应用场景建议
实时视频处理 → Sobel(简单快速)
精密测量系统 → Scharr(精度优先)
理论分析研究 → Laplacian + Gaussian
通用工业检测 → Canny(调整参数σ,阈值)
资源受限环境 → 简化Canny(跳过部分步骤)
5.3 参数调优经验值
Canny参数初始值:
σ = 1.0-1.5 (适中平滑)
Thigh = 梯度幅值直方图70%分位数
Tlow = 0.4 × Thigh
调优方向:
更多细节 → 减小σ,降低阈值
更强降噪 → 增大σ,提高阈值
六、演进脉络总结
6.1 历史发展轴线
1960s: 简单差分算子
1970: Sobel引入平滑思想
1970s: Laplacian理论完善
1980s: Marr提出LoG,Canny提出完整框架
1990s: Canny成为工业标准
2000s+: 深度学习边缘检测兴起
6.2 核心思想演进
1. 从"变化"到"最优变化检测"
Sobel → 考虑局部平均
2. 从"单步"到"流程化"
简单算子 → Canny多阶段优化
3. 从"手工设计"到"数据驱动"
传统算子 → 深度学习特征学习
6.3 现代扩展与变种
实时Canny: 积分图像加速
自适应Canny: 局部阈值调整
彩色Canny: 多通道梯度融合
深度学习: HED, RCF等端到端边缘检测
七、实战演练-Python代码
import numpy as np
import cv2
import matplotlib.pyplot as plt
# 设置中文字体支持
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# 1. 创建测试图像 - 简单的棋盘格
def create_chessboard(size=200, square_size=20):
"""创建棋盘格测试图像"""
chessboard = np.zeros((size, size), dtype=np.uint8)
for i in range(0, size, square_size):
for j in range(0, size, square_size):
if (i // square_size + j // square_size) % 2 == 0:
chessboard[i:i + square_size, j:j + square_size] = 255
return chessboard
# 2. 创建带噪声的棋盘格(用于测试抗噪性)
def add_noise(image, noise_level=0.1):
"""添加椒盐噪声"""
noisy = image.copy()
h, w = image.shape
num_noise = int(noise_level * h * w)
for _ in range(num_noise):
x = np.random.randint(0, h)
y = np.random.randint(0, w)
noisy[x, y] = 255 if np.random.random() > 0.5 else 0
return noisy
# 3. 边缘检测函数集
def apply_sobel(image):
"""Sobel边缘检测"""
sobel_x = cv2.Sobel(image, cv2.CV_64F, 1, 0, ksize=3)
sobel_y = cv2.Sobel(image, cv2.CV_64F, 0, 1, ksize=3)
sobel = np.sqrt(sobel_x ** 2 + sobel_y ** 2)
return np.uint8(np.clip(sobel, 0, 255))
def apply_scharr(image):
"""Scharr边缘检测"""
scharr_x = cv2.Scharr(image, cv2.CV_64F, 1, 0)
scharr_y = cv2.Scharr(image, cv2.CV_64F, 0, 1)
scharr = np.sqrt(scharr_x ** 2 + scharr_y ** 2)
return np.uint8(np.clip(scharr, 0, 255))
def apply_laplacian(image):
"""Laplacian边缘检测"""
laplacian = cv2.Laplacian(image, cv2.CV_64F)
laplacian_abs = np.absolute(laplacian)
return np.uint8(np.clip(laplacian_abs, 0, 255))
def apply_canny(image, low_threshold=50, high_threshold=150):
"""Canny边缘检测"""
return cv2.Canny(image, low_threshold, high_threshold)
def apply_log(image, sigma=1.0):
"""LoG(Laplacian of Gaussian)边缘检测"""
# 先高斯模糊
blurred = cv2.GaussianBlur(image, (5, 5), sigma)
# 再Laplacian
laplacian = cv2.Laplacian(blurred, cv2.CV_64F)
laplacian_abs = np.absolute(laplacian)
return np.uint8(np.clip(laplacian_abs, 0, 255))
# 4. 创建可视化对比图
def visualize_comparison(original, noisy, results, titles):
"""可视化原始图像、噪声图像和各算法结果"""
fig, axes = plt.subplots(2, 4, figsize=(16, 8))
# 第一行:原始图像和各算法在干净图像上的结果
axes[0, 0].imshow(original, cmap='gray')
axes[0, 0].set_title('原始棋盘格图像')
axes[0, 0].axis('off')
for i in range(1, 4):
axes[0, i].imshow(results[i - 1], cmap='gray')
axes[0, i].set_title(titles[i - 1])
axes[0, i].axis('off')
# 第二行:噪声图像和各算法在噪声图像上的结果
axes[1, 0].imshow(noisy, cmap='gray')
axes[1, 0].set_title('添加噪声的图像')
axes[1, 0].axis('off')
for i in range(1, 4):
axes[1, i].imshow(results[i + 2], cmap='gray')
axes[1, i].set_title(titles[i + 2] + " (噪声)")
axes[1, i].axis('off')
plt.tight_layout()
plt.show()
# 5. 创建算法步骤分解图(Canny示例)
def visualize_canny_steps(image):
"""可视化Canny算法的每个步骤"""
# 步骤1: 高斯模糊
blurred = cv2.GaussianBlur(image, (5, 5), 1.0)
# 步骤2: 梯度计算(使用Sobel)
grad_x = cv2.Sobel(blurred, cv2.CV_64F, 1, 0, ksize=3)
grad_y = cv2.Sobel(blurred, cv2.CV_64F, 0, 1, ksize=3)
magnitude = np.sqrt(grad_x ** 2 + grad_y ** 2)
direction = np.arctan2(grad_y, grad_x) * 180 / np.pi
# 步骤3: 非极大值抑制(简化实现)
def non_maximum_suppression(mag, angle):
h, w = mag.shape
suppressed = np.zeros((h, w), dtype=np.float32)
for i in range(1, h - 1):
for j in range(1, w - 1):
# 将角度量化到4个方向
if (0 <= angle[i, j] < 22.5) or (157.5 <= angle[i, j] <= 180) or (-22.5 <= angle[i, j] < 0) or (
-180 <= angle[i, j] < -157.5):
# 水平方向
neighbors = [mag[i, j - 1], mag[i, j + 1]]
elif (22.5 <= angle[i, j] < 67.5) or (-157.5 <= angle[i, j] < -112.5):
# 45度方向
neighbors = [mag[i - 1, j - 1], mag[i + 1, j + 1]]
elif (67.5 <= angle[i, j] < 112.5) or (-112.5 <= angle[i, j] < -67.5):
# 垂直方向
neighbors = [mag[i - 1, j], mag[i + 1, j]]
else:
# 135度方向
neighbors = [mag[i - 1, j + 1], mag[i + 1, j - 1]]
if mag[i, j] >= max(neighbors):
suppressed[i, j] = mag[i, j]
return suppressed
nms = non_maximum_suppression(magnitude, direction)
# 步骤4: 双阈值处理
high_threshold = 50
low_threshold = 20
strong_edges = (nms > high_threshold)
weak_edges = (nms >= low_threshold) & (nms <= high_threshold)
# 最终结果
final_edges = np.zeros_like(image, dtype=np.uint8)
final_edges[strong_edges] = 255
# 可视化
fig, axes = plt.subplots(2, 3, figsize=(15, 10))
steps = [
(image, '原始图像'),
(blurred, '1. 高斯模糊后'),
(np.uint8(np.clip(magnitude, 0, 255)), '2. 梯度幅值图'),
(np.uint8(np.clip(nms, 0, 255)), '3. 非极大值抑制后'),
(np.uint8(weak_edges * 255), '弱边缘(阈值间)'),
(final_edges, '4. 最终Canny边缘')
]
for idx, (img, title) in enumerate(steps):
ax = axes[idx // 3, idx % 3]
ax.imshow(img, cmap='gray')
ax.set_title(title)
ax.axis('off')
plt.tight_layout()
plt.show()
# 6. 执行演示
if __name__ == "__main__":
print("=== 图像边缘检测算法演示 ===\n")
# 创建测试图像
print("1. 创建棋盘格测试图像...")
chessboard = create_chessboard(200, 20)
noisy_chessboard = add_noise(chessboard, 0.05)
# 应用各种边缘检测算法
print("2. 应用各种边缘检测算法...")
# 在干净图像上的结果
sobel_result = apply_sobel(chessboard)
scharr_result = apply_scharr(chessboard)
canny_result = apply_canny(chessboard, 30, 100)
# 在噪声图像上的结果
sobel_noisy = apply_sobel(noisy_chessboard)
laplacian_noisy = apply_laplacian(noisy_chessboard)
canny_noisy = apply_canny(noisy_chessboard, 30, 100)
log_noisy = apply_log(noisy_chessboard, 1.5)
# 准备可视化
clean_results = [sobel_result, scharr_result, canny_result]
clean_titles = ['Sobel边缘检测', 'Scharr边缘检测', 'Canny边缘检测']
noisy_results = [sobel_noisy, laplacian_noisy, canny_noisy, log_noisy]
noisy_titles = ['Sobel', 'Laplacian', 'Canny', 'LoG']
all_results = clean_results + noisy_results
all_titles = clean_titles + noisy_titles
# 显示对比图
print("3. 生成算法对比图...")
visualize_comparison(chessboard, noisy_chessboard, all_results, all_titles)
# 显示Canny算法步骤分解
print("4. 生成Canny算法步骤分解图...")
visualize_canny_steps(chessboard)
print("5. 生成抗噪性对比图...")
# 7. 额外:抗噪性对比
fig, axes = plt.subplots(2, 3, figsize=(15, 10))
# 不同噪声水平下的Canny检测
noise_levels = [0, 0.02, 0.05, 0.1, 0.2, 0.3]
for idx, noise_level in enumerate(noise_levels):
noisy_img = add_noise(chessboard, noise_level)
canny_edges = apply_canny(noisy_img, 30, 100)
ax = axes[idx // 3, idx % 3]
ax.imshow(canny_edges, cmap='gray')
ax.set_title(f'噪声水平: {noise_level * 100:.0f}%\nCanny检测结果')
ax.axis('off')
plt.tight_layout()
plt.show()
print("\n=== 演示完成 ===")
print("观察要点:")
print("1. Sobel/Scharr产生粗边缘,Canny产生单像素宽边缘")
print("2. Laplacian对噪声最敏感,Canny抗噪性最好")
print("3. LoG(高斯+拉普拉斯)比纯Laplacian抗噪性更好")
print("4. 随着噪声增加,Canny仍能保持较好的边缘连续性")
运行结果如下:
关键观察点解释:
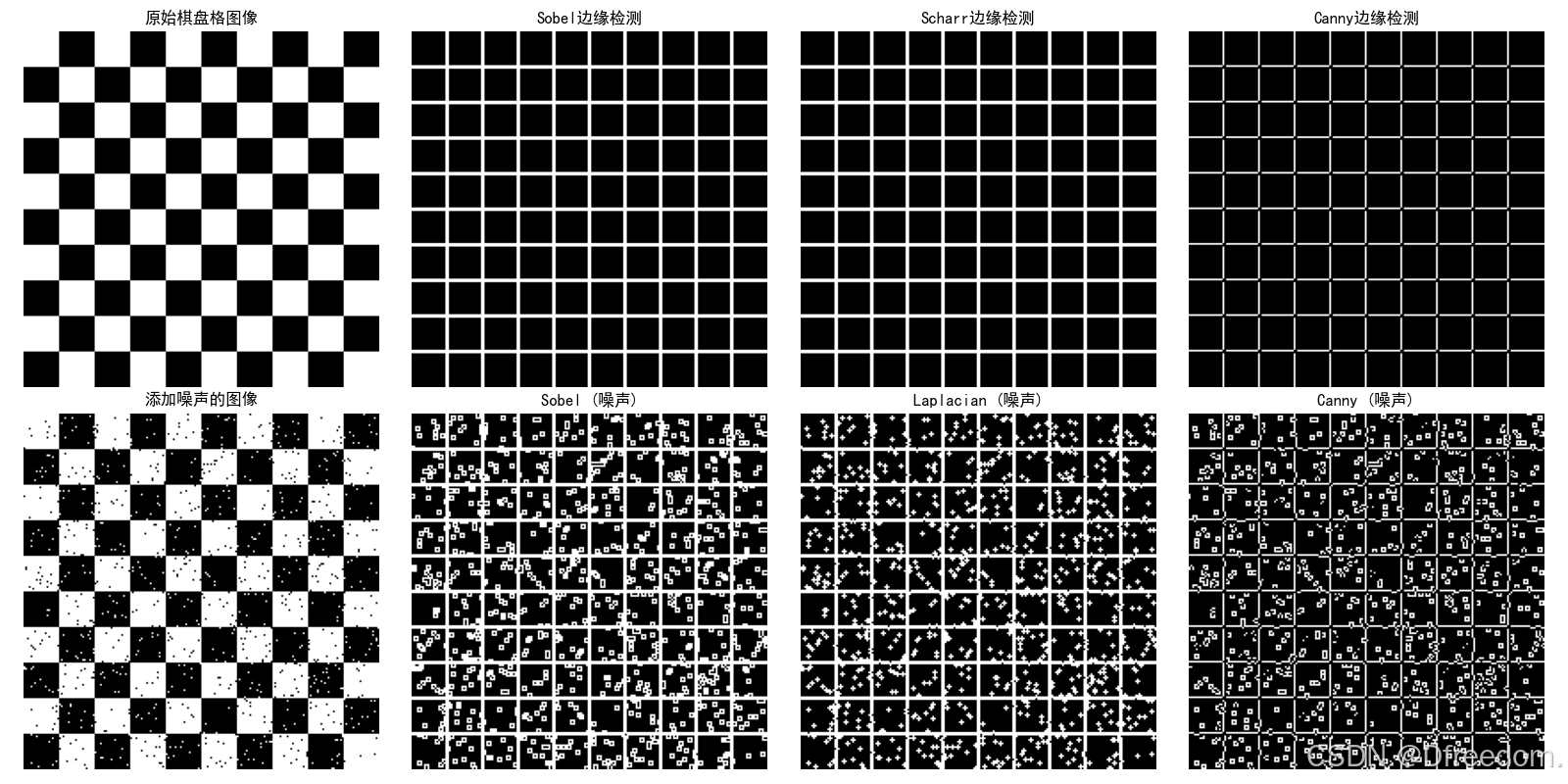
- Sobel vs Scharr vs Canny
- Sobel: 边缘较粗,棋盘格线条有一定宽度
- Scharr: 与Sobel相似,但对角线边缘更清晰(旋转对称性更好)
- Canny: 产生单像素宽的边缘,最清晰
- 抗噪性对比
- 干净图像: 所有算法都能检测出清晰的边缘
- 噪声图像:
- Laplacian受噪声影响最大,出现大量误检测
- Sobel/Scharr有一定抗噪性,但边缘变得模糊
- Canny和LoG抗噪性最好,仍能保持主要边缘
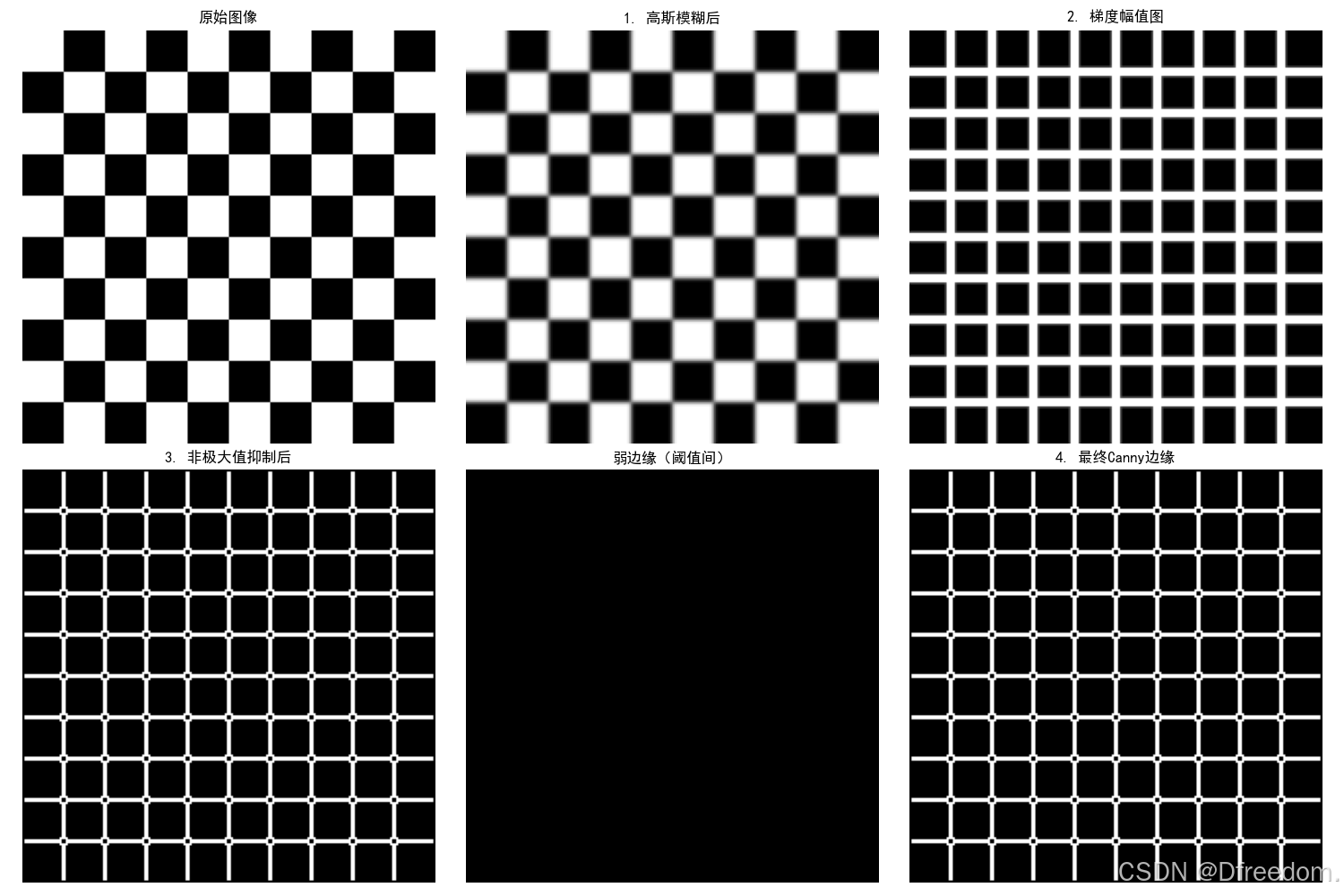
观察要点解释:
Canny算法步骤分解,代码中的visualize_canny_steps函数展示了:
- 原始图像 → 清晰的棋盘格
- 高斯模糊后 → 边缘稍微平滑
- 梯度幅值图 → 边缘显示为亮带(粗边缘)
- 非极大值抑制后 → 边缘细化
- 弱边缘 → 阈值间的边缘点
- 最终Canny边缘 → 单像素宽、连续的边缘
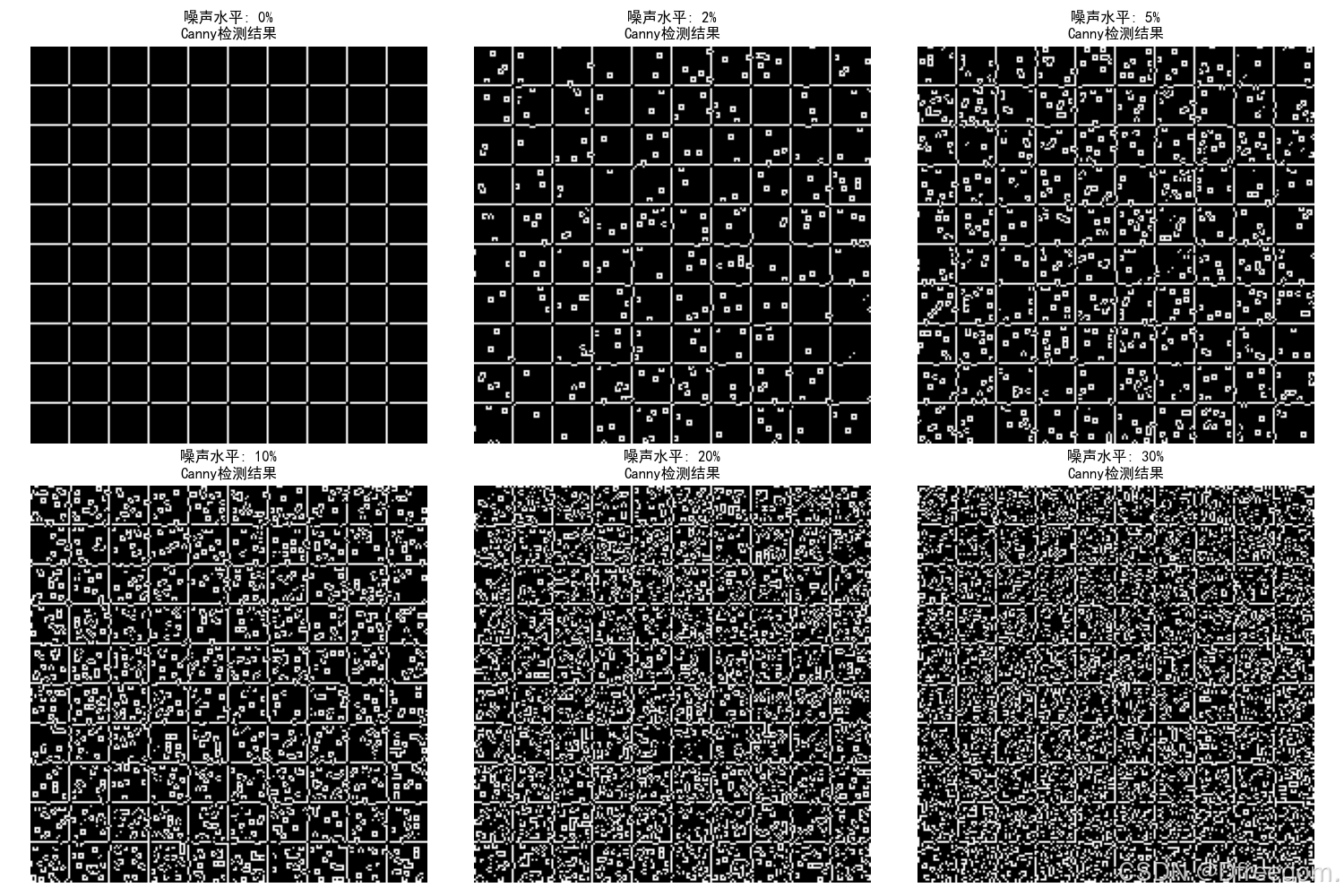
观察要点解释:
抗噪性测试,最后的抗噪性测试图展示了Canny算法在不同噪声水平下的表现:
- 噪声0%: 完美边缘
- 噪声2-5%: 边缘略有断裂但仍可识别
- 噪声10-20%: 开始出现噪声点,但主要边缘仍存在
- 噪声30%: 噪声点增多,但棋盘格结构仍可辨认

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 13
13 0
0- 0



 已为社区贡献26条内容
已为社区贡献26条内容

所有评论(0)