车道线识别和循迹控制是自动驾驶技术中的核心问题之一。今天我们就来聊聊如何基于PreScan实现车道线识别,并通过MPC/LQR控制器进行循迹控制
基于PreScan的车道线识别算法与循迹控制 基于PreScan的车道线识别算法与循迹控制,其中车道线识别算法通过采集单目摄像头数据,Ransac算法提取车道线;采用MPC/LQR控制器实现车道保持与循迹控制(MPC/LQR)。 内附PreScan与Simulink模型,有相关报告和参考文献,模型是自己做的,提供技术帮助
首先,我们得有个场景来模拟真实道路环境,PreScan就是干这个的。它可以帮助我们生成各种复杂的交通场景,包括车道线、其他车辆、行人等。有了场景,接下来就是如何从单目摄像头中提取车道线了。
我们使用Ransac算法来提取车道线。Ransac是一种鲁棒的模型拟合算法,特别适合处理带有噪声的数据。简单来说,它通过随机采样来估计模型参数,然后通过迭代找到最佳的模型。
import numpy as np
import cv2
def ransac_line_fitting(points, max_iterations=100, threshold=10):
best_line = None
best_inliers = []
for _ in range(max_iterations):
sample = points[np.random.choice(len(points), 2, replace=False)]
line = np.polyfit(sample[:, 0], sample[:, 1], 1)
inliers = []
for point in points:
distance = np.abs(line[0] * point[0] - point[1] + line[1]) / np.sqrt(line[0]**2 + 1)
if distance < threshold:
inliers.append(point)
if len(inliers) > len(best_inliers):
best_line = line
best_inliers = inliers
return best_line, np.array(best_inliers)这段代码实现了Ransac算法的基本逻辑。我们从所有点中随机选择两个点来拟合一条直线,然后计算其他点到这条直线的距离,如果距离小于阈值,就认为这个点是内点。通过多次迭代,最终找到拟合效果最好的直线。
有了车道线,接下来就是如何控制车辆沿着车道线行驶了。这里我们使用MPC(模型预测控制)和LQR(线性二次调节器)来实现循迹控制。
MPC的核心思想是通过预测未来的系统行为,来优化当前的控制输入。而LQR则是一种最优控制方法,通过最小化一个二次代价函数来得到控制律。
% MPC控制器示例
function u = mpc_controller(x, A, B, Q, R, N)
% x: 当前状态
% A, B: 系统矩阵
% Q, R: 代价矩阵
% N: 预测步长
% 初始化控制输入
u = zeros(size(B, 2), 1);
for k = 1:N
% 计算控制输入
u = u - (R + B' * Q * B) \ (B' * Q * A * x);
% 更新状态
x = A * x + B * u;
end
end这段Matlab代码展示了一个简单的MPC控制器。我们通过预测未来的系统状态,来优化当前的控制输入。MPC的优势在于它能够处理系统的约束条件,比如车速、转向角等。
LQR的实现相对简单一些,它通过求解Riccati方程来得到最优控制律。
% LQR控制器示例
function K = lqr_controller(A, B, Q, R)
% 求解Riccati方程
[~, K, ~] = icare(A, B, Q, R);
endLQR的控制律可以直接通过状态反馈来实现,计算量相对较小,适合实时控制。
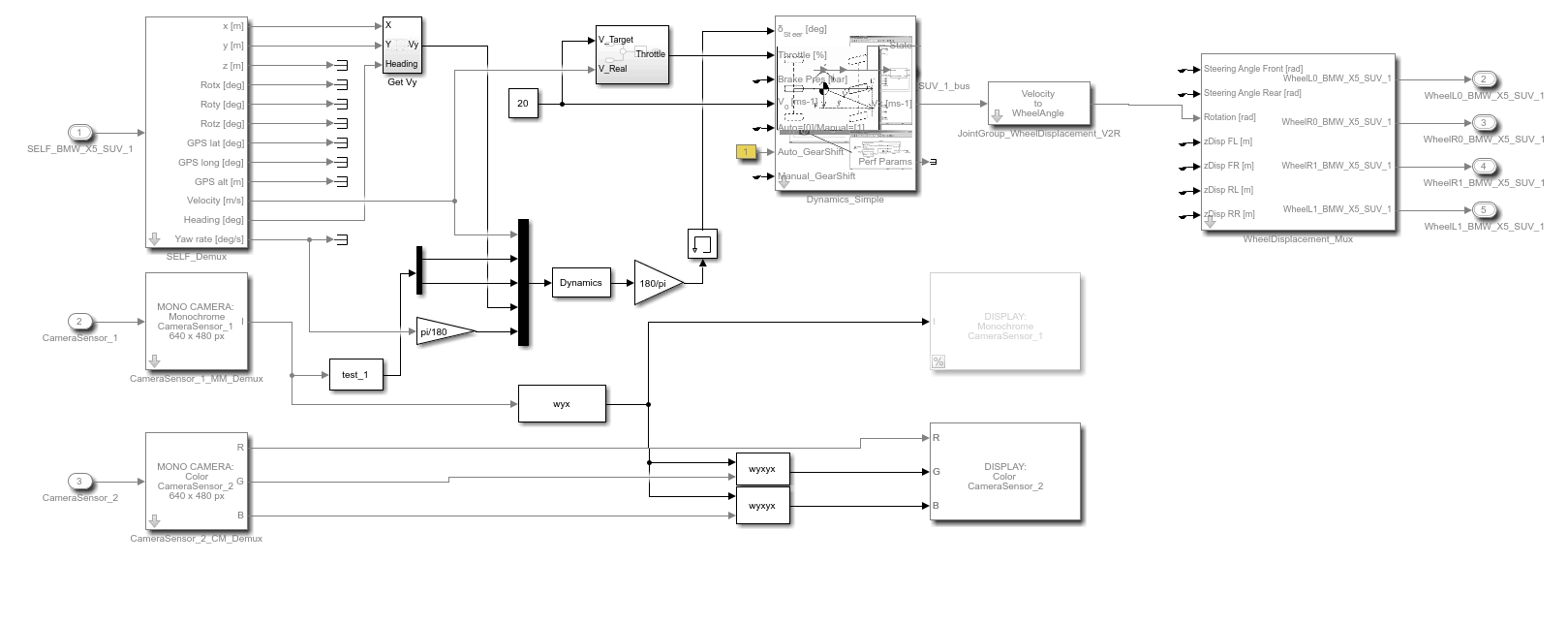
最后,我们把这些算法整合到PreScan和Simulink模型中,进行仿真测试。通过调整参数,我们可以得到不同的控制效果,最终实现车辆的自动循迹。
总的来说,基于PreScan的车道线识别和循迹控制是一个复杂但有趣的问题。通过Ransac、MPC和LQR这些算法的结合,我们可以实现一个相对稳定的自动驾驶系统。当然,实际应用中还需要考虑更多的因素,比如传感器的噪声、道路的曲率变化等。希望这篇文章能给你带来一些启发,欢迎大家一起讨论和交流!

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 4
4 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)