西门子锂电池项目:1500 安全型 PLC 程序开发漫谈
西门子锂电池项目,1500安全型PLC程序。 包含对接雅马哈机器人,视觉,库卡机器人,MES通信程序块。 由STL语言和LAD编写。
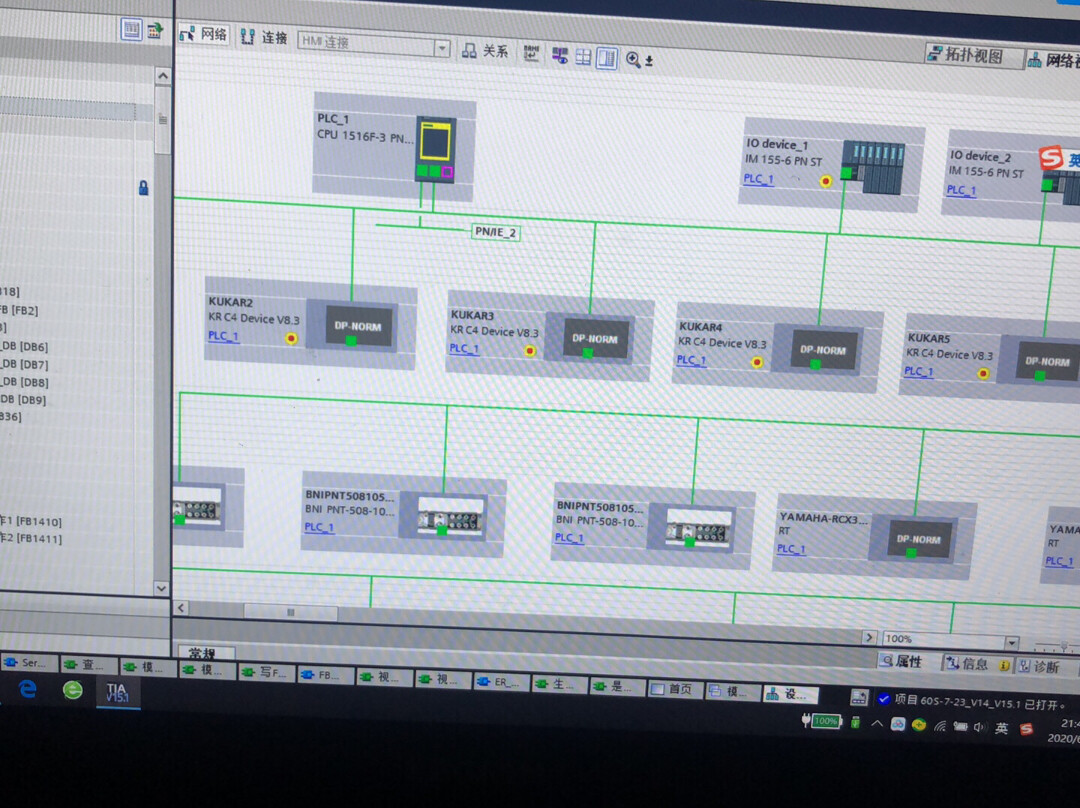
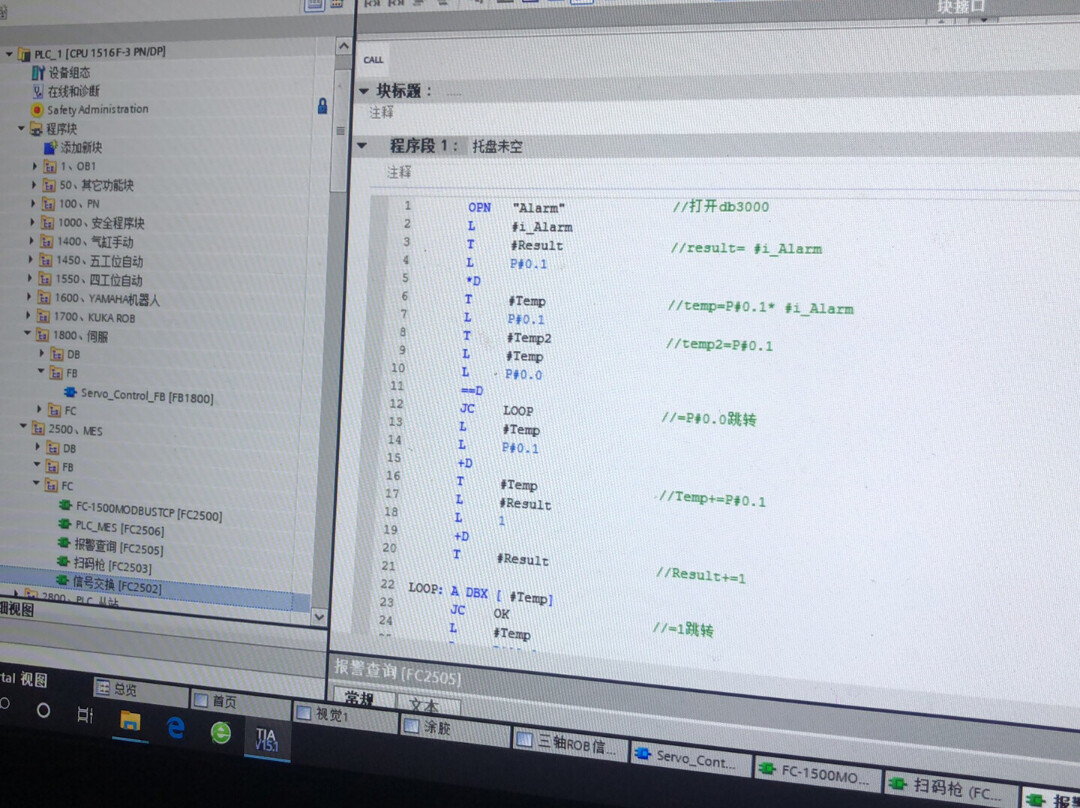
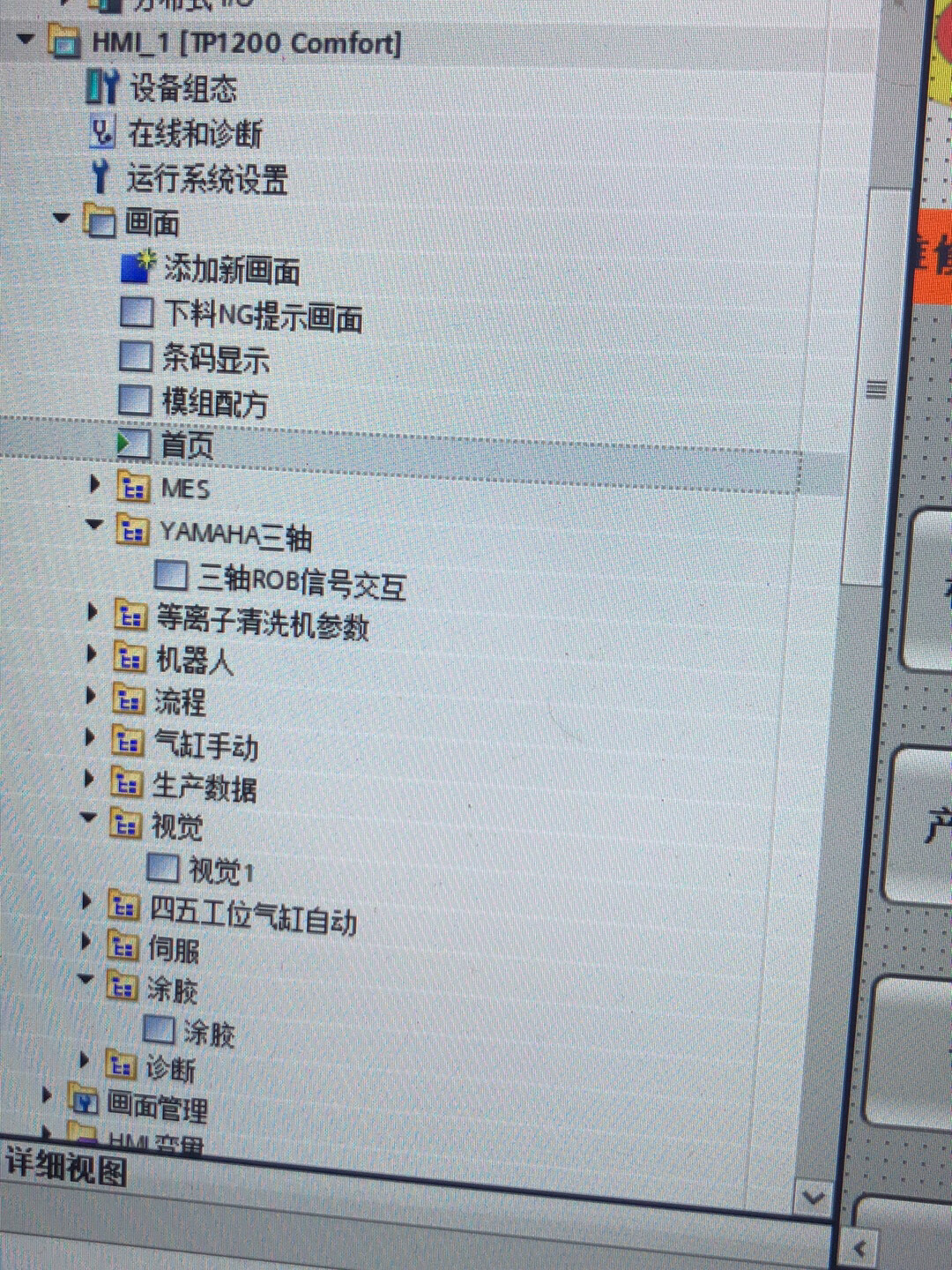
最近参与了西门子锂电池项目,其中 1500 安全型 PLC 程序开发真是个有趣又具挑战的活儿。这个项目里,PLC 要对接雅马哈机器人、视觉系统、库卡机器人,还要搞定 MES 通信程序块,代码编写语言是 STL 和 LAD。
先说说对接雅马哈机器人部分。在 STL 语言里,我们得精心构建数据交互的逻辑。比如,通过定义特定的数据结构来存储机器人的动作指令和反馈信息。
// 定义数据结构用于存储雅马哈机器人指令
STRUCT Yamaha_Robot_Command
Move_Distance : REAL; // 移动距离
Move_Direction : INT; // 移动方向,1 为正, -1 为负
END_STRUCT
// 定义数据结构用于接收雅马哈机器人反馈
STRUCT Yamaha_Robot_Feedback
Is_Moving : BOOL; // 是否正在移动
Error_Code : INT; // 错误代码
END_STRUCT这里我们用 STRUCT 定义了两个结构体,分别用来管理发送给雅马哈机器人的指令以及接收回来的反馈信息。通过这种方式,能很清晰地组织数据,方便后续程序对机器人动作的精确控制。
再讲讲视觉部分。在 LAD 编程中,视觉系统的对接有点像搭建积木。我们通过功能块来处理视觉采集到的图像数据,进行识别和定位。
比如说有个简单的定位功能块:
西门子锂电池项目,1500安全型PLC程序。 包含对接雅马哈机器人,视觉,库卡机器人,MES通信程序块。 由STL语言和LAD编写。
在这个功能块里,输入端口连接视觉传感器采集到的图像数据,经过一系列内部逻辑运算,输出端口给出目标物体的坐标信息。这些坐标信息会被 PLC 用于指挥机器人准确抓取物体。
库卡机器人的对接在 STL 里又是另一番天地。和雅马哈机器人不同,库卡机器人的通信协议和指令格式稍有差异。
// 发送给库卡机器人的运动指令函数
FC1 :
BEGIN
VAR_INPUT
Target_Position : ARRAY[0..2] OF REAL; // 目标位置坐标 x,y,z
Speed : REAL; // 运动速度
END_VAR
// 构建发送给库卡机器人的指令字符串
Command_String := 'MOVE P(' + REAL_TO_STRING(Target_Position[0]) + ',' + REAL_TO_STRING(Target_Position[1]) + ',' + REAL_TO_STRING(Target_Position[2]) + ') V(' + REAL_TO_STRING(Speed) + ')';
// 通过通信端口发送指令
SEND_COMMAND(Command_String);
END这段代码定义了一个功能块 FC1,根据输入的目标位置和速度信息,构建库卡机器人能识别的运动指令字符串,然后通过通信端口发送出去。
最后是 MES 通信程序块。这部分无论是 STL 还是 LAD,都侧重于数据的准确传输和解析。
// MES 数据接收处理
OB100 :
BEGIN
// 接收 MES 发送的数据
IF MES_RECEIVE_DATA THEN
Received_Data := MES_BUFFER;
// 解析数据
PART_NUMBER := BYTE_TO_INT(Received_Data[0]);
QUANTITY := BYTE_TO_INT(Received_Data[1]);
// 其他数据解析...
END_IF
END这段在组织块 OB100 里的代码,当检测到有 MES 数据接收信号 MESRECEIVEDATA 时,从接收缓冲区 MESBUFFER 读取数据,并按照预定格式解析出零件编号 PARTNUMBER 和数量 QUANTITY 等信息。

整个西门子锂电池项目的 1500 安全型 PLC 程序,通过 STL 和 LAD 两种语言,将各个设备和系统有机地整合在一起,就像一场精密的舞蹈,每个环节都紧密配合,共同完成锂电池生产的复杂任务。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 4
4 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)