窄空间环境下多无人机自重构V型编队:一场算法与现实的碰撞
V型编队并不是什么新鲜概念,它在自然界中已经被鸟群广泛采用。V型队形可以有效减少飞行中的空气阻力,提高整体飞行效率。而在无人机编队中,V型编队也有类似的优势:既能保证队形的紧凑性,又能避免无人机之间的碰撞。不过,问题来了:在狭窄的空间环境下,如何让无人机动态调整队形,同时保证编队的稳定性和安全性?这就需要设计一个自适应的控制算法,能够根据环境变化实时调整无人机的位置和速度。通过这次实验,我深刻体会
窄空间环境下多无人机自重构v型编队,matlab 仿真实验
最近,我在做一个关于多无人机编队控制的项目,主题是“窄空间环境下多无人机自重构V型编队”。听起来挺高大上的,但实际操作起来还是有不少挑战的。今天就和大家分享一下我的思考过程和实验结果,中间会穿插一些代码片段,希望能给大家带来一些启发。
1. 为什么是V型编队?
V型编队并不是什么新鲜概念,它在自然界中已经被鸟群广泛采用。V型队形可以有效减少飞行中的空气阻力,提高整体飞行效率。而在无人机编队中,V型编队也有类似的优势:既能保证队形的紧凑性,又能避免无人机之间的碰撞。
不过,问题来了:在狭窄的空间环境下,如何让无人机动态调整队形,同时保证编队的稳定性和安全性?这就需要设计一个自适应的控制算法,能够根据环境变化实时调整无人机的位置和速度。
2. 自重构编队的核心算法
我们的算法主要分为两部分:队形重构和避障控制。队形重构负责在空间受限的情况下动态调整V型队形,而避障控制则确保无人机不会碰撞到障碍物或其他无人机。
队形重构算法
队形重构的核心思想是基于领导者-跟随者的框架。领导无人机(Leader)负责规划整体路径,跟随无人机(Followers)则根据Leader的位置和队形要求调整自己的位置。
窄空间环境下多无人机自重构v型编队,matlab 仿真实验

以下是队形重构的部分代码逻辑:
% 计算跟随无人机的目标位置
function [target_pos] = computeTargetPosition(leader_pos, follower_pos, index)
% V型队形的参数
spacing = 1; % 无人机之间的间距
angle = 30; % V型队形的角度(度)
angle_rad = deg2rad(angle);
% 计算当前无人机在队形中的偏移量
if index == 1
offset = [spacing * cos(angle_rad), spacing * sin(angle_rad)];
else
offset = [spacing * cos(-angle_rad), spacing * sin(-angle_rad)];
end
% 目标位置 = 领导者位置 + 偏移量
target_pos = leader_pos + offset;
end这段代码的核心是根据无人机的编号(index)计算其相对于领导者的偏移量。通过调整spacing和angle,可以控制队形的紧凑程度和展开角度。
避障控制算法
避障控制部分采用了基于势场法的思想。无人机在飞行过程中会受到两个力:一个是趋向目标位置的力,另一个是避开障碍物的力。这两个力的合成决定了无人机的最终运动方向。
以下是避障控制的伪代码:
% 避障控制
function [control_force] = obstacleAvoidance(current_pos, target_pos, obstacles)
attraction_force = 1 * (target_pos - current_pos); % 趋向目标的力
repulsion_force = zeros(1, 2);
for i = 1:length(obstacles)
dist = norm(current_pos - obstacles(i));
if dist < safety_distance
repulsion_force = repulsion_force + (1 / dist^2) * (current_pos - obstacles(i));
end
end
control_force = attraction_force - repulsion_force;
end这段代码的核心是计算无人机受到的吸引力和排斥力。吸引力驱使无人机向目标位置移动,而排斥力则帮助无人机避开障碍物。通过调整力的权重(如attraction_force的系数),可以优化无人机的运动轨迹。
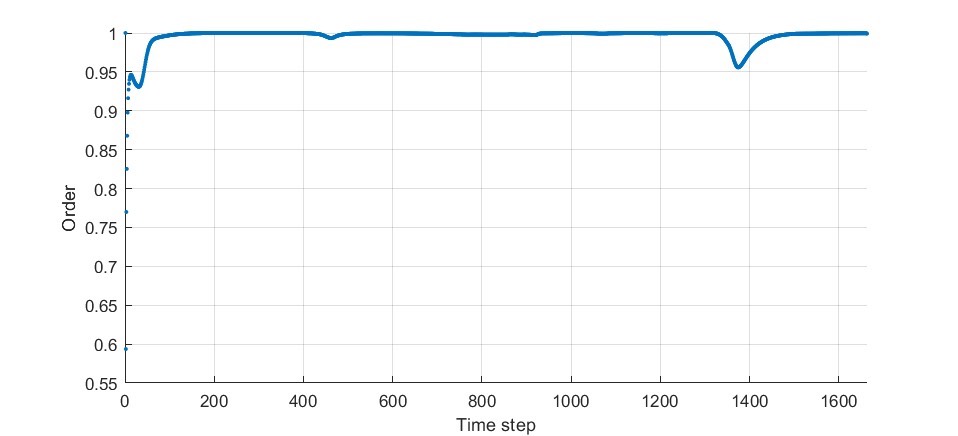
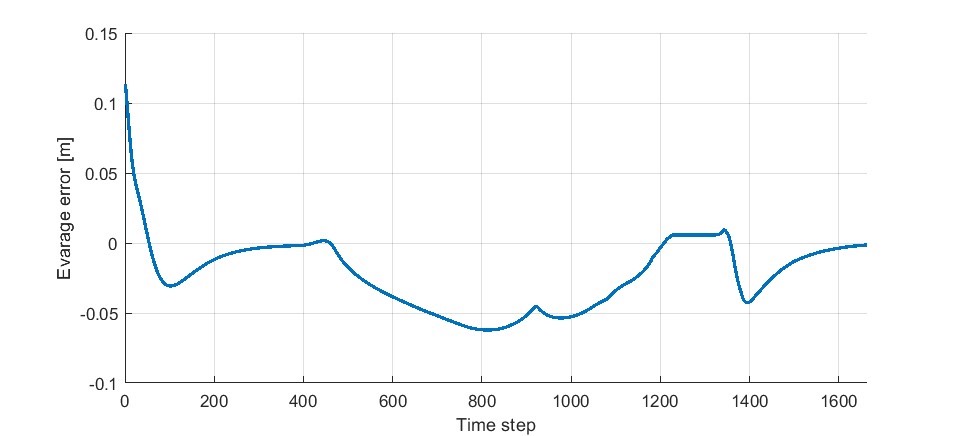
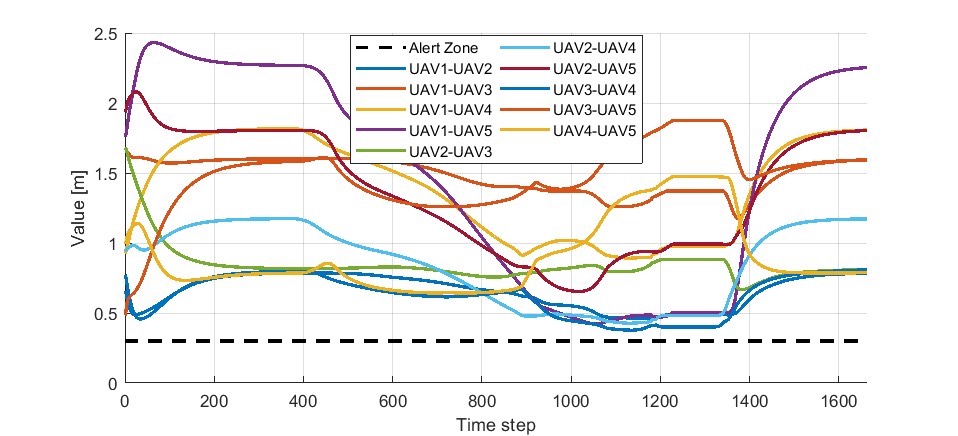
3. 仿真实验:从理想到现实
为了验证算法的有效性,我使用MATLAB进行了仿真实验。实验场景是一个狭窄的走廊环境,无人机需要在保持V型队形的同时通过走廊。
仿真结果
以下是仿真过程中的一些关键帧:
- 初始队形:无人机以标准V型队形进入走廊。
- 动态调整:当遇到狭窄空间时,无人机根据算法动态调整队形,减小展开角度。
- 避障表现:无人机成功避开走廊两侧的障碍物,没有发生碰撞。
仿真代码
以下是MATLAB仿真框架的核心代码:
% 初始化无人机和障碍物的位置
leader_pos = [0, 0];
follower_pos = [computeTargetPosition(leader_pos, [0,0], 1), computeTargetPosition(leader_pos, [0,0], 2)];
obstacles = [ [-1, -2], [-1, 2], [5, -2], [5, 2] ]; % 走廊两侧的障碍物
% 仿真循环
for t = 1:100
% 更新领导者的路径
leader_pos = leader_pos + [0.1, 0]; % 领导者向前移动
% 更新跟随者的队形
for i = 1:length(follower_pos)
target = computeTargetPosition(leader_pos, follower_pos(i), i);
force = obstacleAvoidance(follower_pos(i), target, obstacles);
follower_pos(i) = follower_pos(i) + force * dt; % dt为时间步长
end
% 绘制当前状态
plotSimulation(leader_pos, follower_pos, obstacles);
end这段代码展示了仿真的基本流程:领导者的移动、跟随者的队形调整以及障碍物的避障。通过调整参数(如dt和力的权重),可以优化仿真效果。
4. 总结与展望
通过这次实验,我深刻体会到多无人机编队控制的复杂性。在窄空间环境下,无人机不仅要保持队形,还要实时感知环境并做出调整。虽然我们的算法在仿真中表现良好,但在实际应用中还需要考虑更多的因素,比如传感器噪声和通信延迟。
未来,我计划在以下几个方面继续改进:
- 扩展到更多无人机:目前的算法主要针对少量无人机,未来可以尝试扩展到更大的编队。
- 加入动态障碍物:当前的仿真环境是静态的,未来可以引入动态障碍物,让算法更具挑战性。
- 优化控制算法:尝试使用深度强化学习等更先进的算法,进一步提升编队的稳定性和效率。
总之,多无人机编队控制是一个充满挑战但也充满机遇的领域。希望通过我的分享,能给更多人带来启发,一起探索这个有趣的方向!

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 6
6 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)