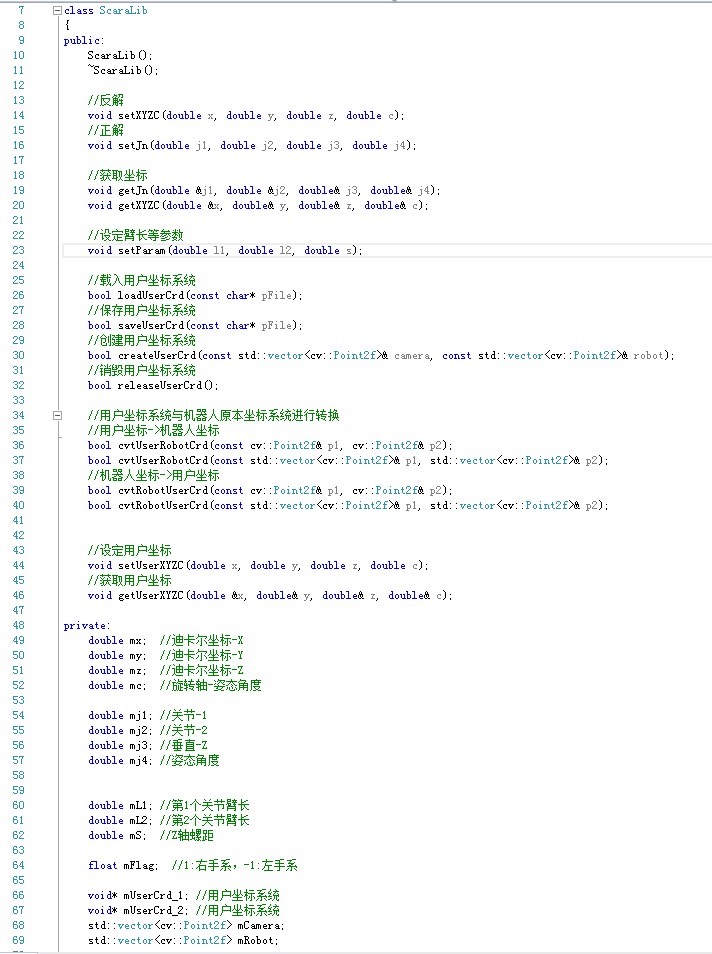
直接上代码,先看SCARA机械手的核心结构定义
·
四轴scara机器人正解逆解算法,功能有:设定臂长,末端姿态,用户坐标系统及其转换。 不含标定、死区管理,要自己加。 c++源码,vs2015工程,用户坐标系是用opencv库。 支持左手右手两种模式
class ScaraRobot {
public:
struct Config {
double L1 = 300.0; // 大臂长度
double L2 = 250.0; // 小臂长度
bool isLeftHand = false; // 左手系标志
};
cv::Mat userCoordMatrix; // 用户坐标系变换矩阵
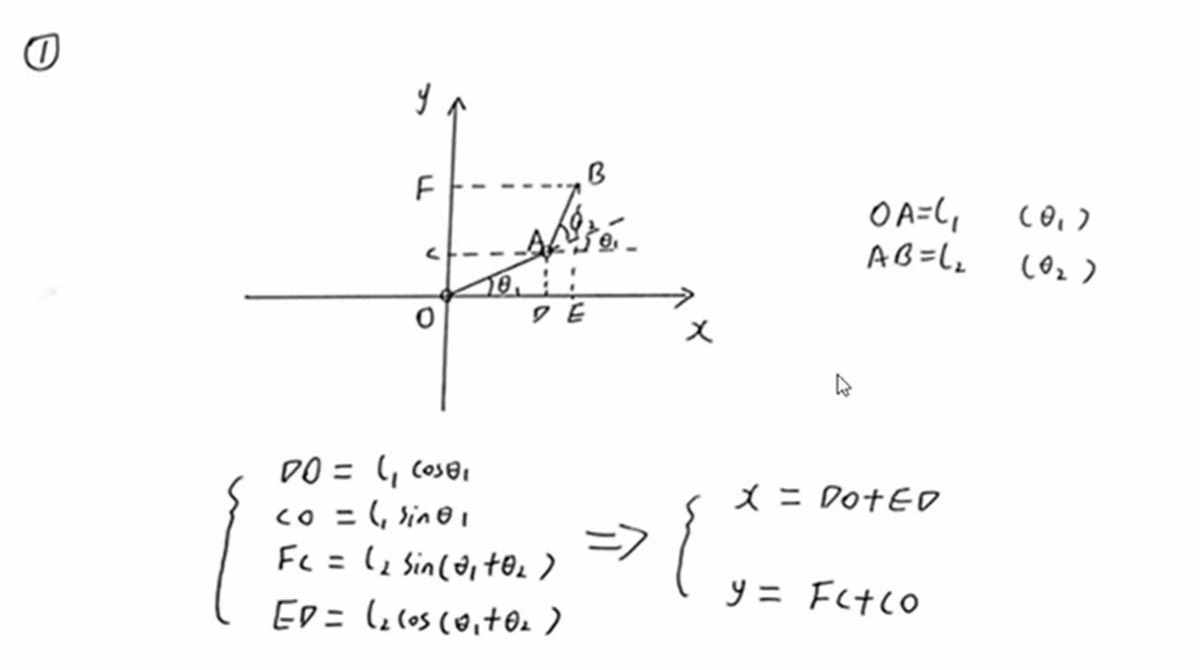
// 正解计算:关节角度转末端坐标
cv::Point3d forwardKinematics(double theta1, double theta2, double z) const {
double x = config.L1 * cos(theta1) + config.L2 * cos(theta1 + theta2);
double y = config.L1 * sin(theta1) + config.L2 * sin(theta1 + theta2);
return applyCoordTransform(cv::Point3d(x, y, z));
}
};这里的applyCoordTransform实现了用户坐标系的转换。我们用OpenCV的矩阵运算处理坐标系变换:
cv::Point3d applyCoordTransform(const cv::Point3d& pt) const {
cv::Mat src = (cv::Mat_<double>(4,1) << pt.x, pt.y, pt.z, 1);
cv::Mat dst = userCoordMatrix * src;
return cv::Point3d(dst.at<double>(0), dst.at<double>(1), dst.at<double>(2));
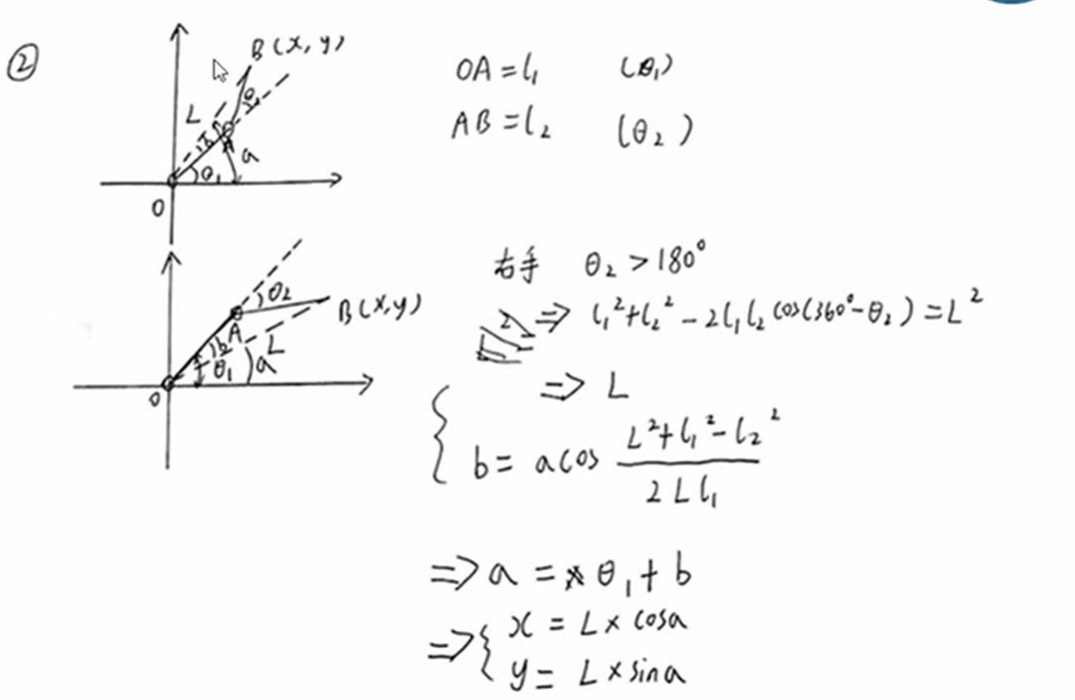
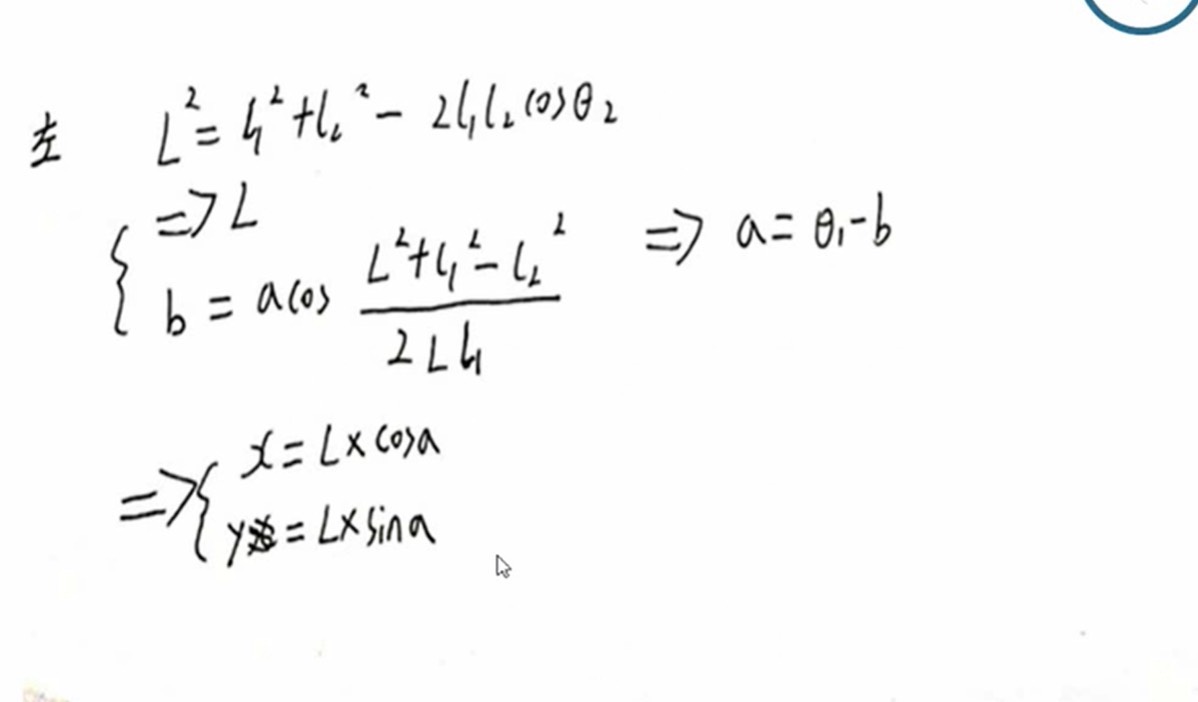
}逆解部分稍微复杂,需要处理两种可能的解:
bool inverseKinematics(const cv::Point3d& target, double& theta1, double& theta2) const {
// 转换到基坐标系
cv::Point3d basePt = reverseCoordTransform(target);
double x = basePt.x;
double y = basePt.y;
// 计算第二关节角度
double cosTheta2 = (x*x + y*y - config.L1*config.L1 - config.L2*config.L2)
/ (2 * config.L1 * config.L2);
if (abs(cosTheta2) > 1.0) return false; // 不可达
theta2 = acos(cosTheta2);
// 两种解的情况处理
double alpha = atan2(y, x);
double beta = atan2(config.L2 * sin(theta2),
config.L1 + config.L2 * cos(theta2));
theta1 = alpha - beta; // 肘部向上解
double theta1_alt = alpha + beta; // 肘部向下解
// 选择符合关节限制的解
return checkAngleLimit(theta1, theta2);
}这里的坐标系镜像处理藏在reverseCoordTransform中,根据左右手模式自动翻转X轴:
cv::Point3d reverseCoordTransform(const cv::Point3d& pt) const {
cv::Mat invMatrix;
cv::invert(userCoordMatrix, invMatrix);
cv::Mat src = (cv::Mat_<double>(4,1) << pt.x, pt.y, pt.z, 1);
cv::Mat dst = invMatrix * src;
// 左手系X轴镜像
if(config.isLeftHand) dst.at<double>(0) *= -1;
return cv::Point3d(dst.at<double>(0), dst.at<double>(1), dst.at<double>(2));
}实际使用时可以这样设置用户坐标系:
// 创建偏移+旋转的坐标系
cv::Mat createUserCoord(cv::Point2d offset, double rotateDeg) {
cv::Mat matrix = cv::Mat::eye(4,4,CV_64F);
cv::Mat rot = cv::getRotationMatrix2D(cv::Point2f(0,0), rotateDeg, 1.0);
rot.copyTo(matrix(cv::Rect(0,0,3,2)));
matrix.at<double>(0,3) = offset.x;
matrix.at<double>(1,3) = offset.y;
return matrix;
}调试时遇到过坑:OpenCV的矩阵乘法默认不考虑齐次坐标,必须显式补1。有个取巧的写法是用4x4变换矩阵,把三维点扩展到(x,y,z,1)再做乘法。
四轴scara机器人正解逆解算法,功能有:设定臂长,末端姿态,用户坐标系统及其转换。 不含标定、死区管理,要自己加。 c++源码,vs2015工程,用户坐标系是用opencv库。 支持左手右手两种模式
完整工程里还包含关节限位检测、速度规划等模块,但核心算法就这些。重点在于坐标变换的矩阵运算和三角函数解算,建议用Eigen替代OpenCV的矩阵计算会更高效,但考虑到用户环境这里保持兼容。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 0
0 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)