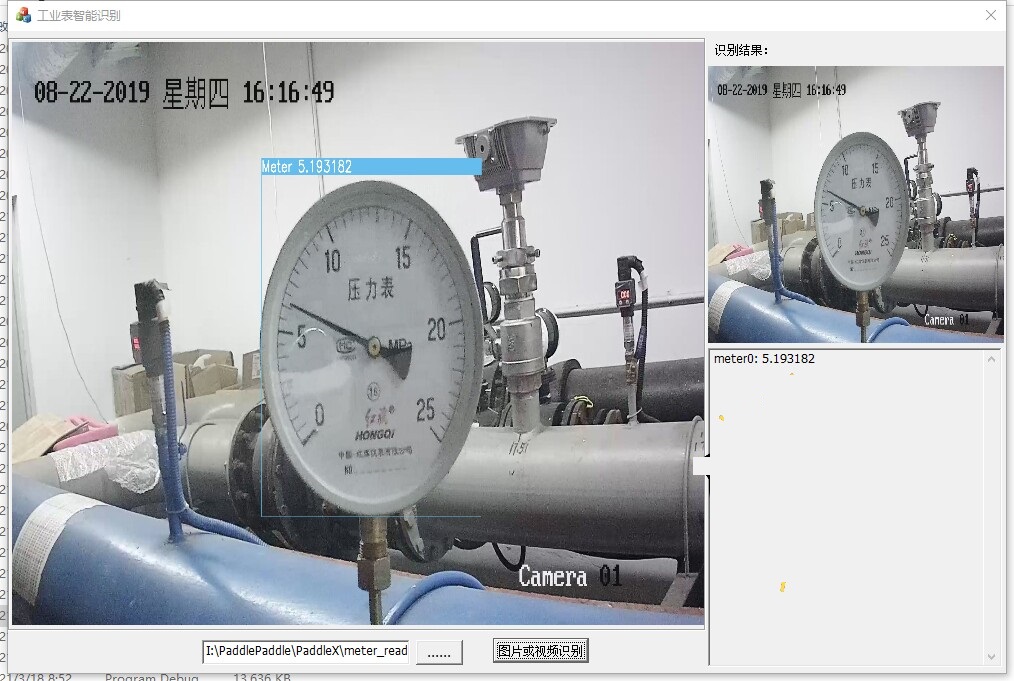
opencv 表识别 工业表智能识别 数字式表盘识别,指针式表盘刻度识别,分为表检测,表盘纠正...
opencv 表识别 工业表智能识别 数字式表盘识别,指针式表盘刻度识别,分为表检测,表盘纠正,刻度分割,刻度拉直识别 第一,检测表盘 第二,然后,把表盘区域 ROI 出来 第三,然后,送到分割模型中 把表盘中的指针和时刻,分割出来,然后,把圆形表盘,拉直,拉成一条线,看当时时刻在 哪条线,把表盘中的指针和时刻,分割出来,分割出来的是圆形的,分割出来的,只有刻度 和指针,但是是圆形的,拉成直线,圆,变换成直线,然后,看当前指针指到哪个刻度
ppmeterpro 是一套聚焦工业场景的智能表盘识别系统,其代码体系以 YAML 配置解析 与 OpenCV 计算机视觉处理 为双核心,覆盖从表盘图像采集到读数输出的全流程。本文将深入代码文件结构,基于实际代码模块的功能定义,详细拆解各核心组件的代码职责、数据交互逻辑与功能实现细节,重点聚焦代码层面的功能设计,避免过度暴露核心实现代码。
一、项目代码结构与核心模块划分
从提供的代码文件来看,ppmeterpro 的代码体系可划分为两大核心模块与若干辅助模块,各模块通过明确的接口协作,支撑表盘识别全流程。具体模块划分及代码文件对应关系如下:
| 模块类别 | 核心代码文件/目录 | 代码功能定位 |
|---|---|---|
| YAML 配置解析模块 | include_yaml/include/yaml-cpp/ 下所有文件(如 anchor.h、binary.h、node/ 目录等) |
负责 YAML 配置文件的加载、解析、节点操作与数据类型转换,为系统提供“配置驱动”能力 |
| OpenCV 视觉处理依赖模块 | opencv/include/opencv2/ 下 calib3d.hpp、aruco.hpp、bgsegm.hpp、bioinspired/ 等 |
提供相机标定、目标检测、背景分割、图像校正等计算机视觉基础能力,是表盘识别的技术核心 |
| 辅助工具模块 | include_yaml/include/yaml-cpp/exceptions.h、dll.h、noexcept.h 等 |
定义异常处理机制、动态链接库导出规则、跨编译器兼容性宏,保障系统稳定性与可移植性 |
二、YAML 配置解析模块(yaml-cpp)代码功能解析
YAML 配置解析模块基于 yaml-cpp 库实现,是 ppmeterpro 实现“参数可配置”的核心,其代码文件围绕“数据类型定义-节点构建-解析与序列化-异常处理”的逻辑分层设计,各文件功能明确且相互依赖,形成完整的配置处理链路。
2.1 基础数据类型定义:为配置解析提供类型支撑
该层级代码文件主要定义 YAML 解析所需的基础数据结构,包括锚点、二进制数据、节点类型等,是后续节点操作的基础。
2.1.1 `anchor.h`:锚点与引用机制定义
- 代码功能:定义 YAML 文档中的锚点(Anchor)相关类型,用于标记与引用重复节点,避免配置冗余。
- 定义
anchort类型:基于std::sizet实现,作为锚点的唯一标识,支持节点的引用追踪; - 定义
NullAnchor常量:值为 0,用于表示“无锚点”状态,区分未标记节点与已标记节点。 - 在系统中的作用:在表盘配置文件中,若多个表盘共享相同的相机参数,可通过锚点标记该参数节点,其他表盘节点直接引用,减少配置文件的重复内容,提升配置维护效率。
2.1.2 `binary.h`:二进制数据处理
- 代码功能:封装二进制数据的存储、Base64 编解码及数据所有权管理,支持配置文件中二进制资源(如表盘模板图像、模型权重)的存储与读取。
- 核心类
Binary:包含mdata(自有二进制数据,std::vector类型)、munownedData(外部引用数据指针)、m_unownedSize(外部引用数据长度)三个成员变量,通过owned()方法判断数据所有权; - 编解码接口:提供
EncodeBase64()(二进制转 Base64 字符串)与DecodeBase64()(Base64 字符串转二进制)函数,支持二进制数据与文本格式的双向转换; - 数据操作接口:
swap()方法支持与std::vector交换数据,operator==/operator!=支持二进制数据的比较。 - 在系统中的作用:可将表盘的模板图像(用于刻度匹配)转换为 Base64 字符串存储在 YAML 配置中,避免配置文件与图像文件的分离管理,提升系统部署便捷性。
2.1.3 `node/type.h`:YAML 节点类型定义
- 代码功能:定义 YAML 节点的核心类型,为节点操作提供类型判断依据。
- 枚举
NodeType::value:包含Undefined(未定义)、Null(空值)、Scalar(标量,如数字、字符串)、Sequence(序列,如数组)、Map(键值对,如字典)五种类型; - 类型判断逻辑:后续
Node类通过Type()方法返回该枚举值,支持开发者快速判断节点类型(如IsScalar()、IsMap())。 - 在系统中的作用:在读取表盘配置时,通过节点类型判断,可区分“标量参数”(如
threshold: 127)、“序列参数”(如scales: [0.5, 1.0, 2.0])与“键值对参数”(如camera: {fx: 1000, fy: 1000}),确保参数读取的正确性。
2.2 节点操作核心:`node/` 目录下代码功能解析
node/ 目录是 YAML 配置解析模块的核心,封装了 YAML 节点的创建、访问、遍历、转换等全量操作,通过 Node 类为上层提供统一的节点操作接口,同时通过 convert.h 实现节点数据与 C++ 类型的双向转换。
2.2.1 `node/node.h`:`Node` 类核心接口定义
- 代码功能:定义
Node类,封装 YAML 节点的所有操作,是开发者与 YAML 配置交互的核心入口。 - 节点类型判断:提供
IsDefined()(判断节点是否已定义)、IsNull()、IsScalar()、IsSequence()、IsMap()等方法,支持快速判断节点类型; - 数据访问:提供
as()模板方法,支持将节点数据转换为指定 C++ 类型(如as()、as()),若转换失败则抛出BadConversion异常;提供Scalar()方法,直接获取标量节点的字符串形式; - 节点遍历:提供
begin()/end()方法,返回迭代器,支持对Sequence或Map类型节点进行遍历(如遍历Sequence类型的scales节点,获取所有缩放系数); - 节点修改:提供
pushback()(向Sequence节点添加元素)、forceinsert()(向Map节点插入键值对)、remove()(删除节点)等方法,支持配置的动态修改。 - 关键细节:
Node类通过mpNode(指向底层节点数据)与mpMemory(内存管理对象)实现数据封装,确保节点操作的线程安全与内存安全;同时支持“僵尸节点”(Zombie)机制,对未定义或无效的节点访问抛出InvalidNode异常,提升代码健壮性。
2.2.2 `node/convert.h`:数据类型转换逻辑
- 代码功能:定义
convert模板结构体,实现 C++ 类型与 YAML 节点数据的双向转换,是Node::as()方法的底层支撑。 - 默认转换实现:为
std::string、数值类型(int、float、double 等)、STL 容器(std::vector、std::map、std::list等)提供默认转换逻辑; - 例如,
convert的decode()方法判断节点是否为Scalar类型,若是则将node.Scalar()赋值给目标字符串; - 对于
std::vector,encode()方法将容器元素逐个添加到Sequence节点,decode()方法从Sequence节点中逐个读取元素并转换为 T 类型; - 自定义转换扩展:支持开发者通过特化
convert结构体,实现自定义类型(如表盘参数结构体MeterConfig)的转换逻辑,只需实现encode()(自定义类型转Node)与decode()(Node转自定义类型)方法即可。 - 在系统中的作用:读取表盘配置时,可直接通过
node.as()将 YAML 中的表盘配置节点转换为MeterConfig结构体,无需手动解析每个子节点,极大简化代码逻辑。
2.2.3 `node/parse.h` 与 `node/emit.h`:解析与序列化
parse.h功能:提供 YAML 文档的加载与解析接口,支持从字符串、文件、输入流加载配置并转换为Node对象。- 核心函数:
Load(const std::string& input)(从字符串加载)、LoadFile(const std::string& filename)(从文件加载)、LoadAll(const std::string& input)(加载多个文档); - 异常处理:若配置文件格式错误或不存在,抛出
ParserException或BadFile异常,并携带错误位置(行号、列号),便于调试。 emit.h功能:提供Node对象的序列化接口,支持将Node转换为 YAML 字符串或写入输出流。- 核心函数:
Dump(const Node& node)(将Node序列化为字符串)、operator<<(std::ostream& out, const Node& node)(将Node写入输出流); - 格式控制:序列化过程中自动保持 YAML 的缩进、换行等格式,确保输出的配置文件可读性。
- 在系统中的作用:系统启动时,通过
LoadFile("meter_config.yaml")加载表盘配置;运行过程中,若修改了配置(如更新相机内参),可通过Dump(node)将修改后的Node序列化并写入文件,实现配置的持久化。
2.3 异常处理与跨平台支持
2.3.1 `exceptions.h`:异常体系定义
- 代码功能:定义完整的异常类层级,覆盖 YAML 解析、节点操作、数据转换等全流程的错误场景,为问题定位提供详细信息。
- 基类
Exception:继承自std::runtime_error,包含mark(错误位置,Mark类,存储行号、列号)与msg(错误信息)两个成员变量; - 派生异常类:
ParserException:解析错误(如语法错误、未闭合节点);RepresentationException:节点表示错误(如KeyNotFound键不存在、BadConversion类型转换失败、InvalidNode无效节点访问);EmitterException:序列化错误(如非法节点类型序列化);BadFile:文件访问错误(如文件不存在、权限不足)。- 在系统中的作用:当读取配置时若缺失关键参数(如
camera.fx),会抛出KeyNotFound异常,携带参数名与错误位置,开发者可快速定位配置文件的问题。
2.3.2 `dll.h` 与 `noexcept.h`:跨平台支持
dll.h功能:定义YAMLCPPAPI宏,支持 Windows 与 Linux 平台的动态链接库(DLL)导出/导入逻辑。- 逻辑:通过
YAMLCPPDLL与yamlcppEXPORTS宏区分“编译 DLL”与“使用 DLL”场景,Windows 平台使用declspec(dllexport)/declspec(dllimport),Linux 平台无需额外修饰,确保模块在不同平台下可正确链接。 noexcept.h功能:定义YAMLCPPNOEXCEPT宏,适配不同编译器对noexcept关键字的支持(如 Visual Studio 2015 及以下版本不支持noexcept,使用_NOEXCEPT替代),确保代码编译兼容性。
三、OpenCV 视觉处理模块代码功能解析
OpenCV 模块是 ppmeterpro 实现表盘识别的技术核心,提供从图像预处理到目标识别的全流程视觉能力,核心代码文件围绕“相机标定与校正”“目标检测”“背景分割”“生物启发式视觉处理”展开,为表盘识别的各阶段提供支撑。
3.1 `calib3d.hpp`:相机标定与图像校正
- 代码功能:提供相机内参标定、图像畸变校正、透视变换、3D 点投影等核心能力,解决工业场景下相机畸变、表盘倾斜导致的识别误差。
- 相机标定:
calibrateCamera()函数通过多张棋盘格图像,计算相机内参矩阵(cameraMatrix)与畸变系数(distCoeffs);stereoCalibrate()函数支持双目相机标定,计算双目相机间的相对姿态(旋转矩阵R、平移向量T); - 图像校正:
undistort()函数通过相机内参与畸变系数,消除图像畸变;initUndistortRectifyMap()函数生成畸变校正的映射表,结合remap()函数实现实时图像校正; - 透视变换:
findHomography()函数计算两张图像间的单应矩阵,支持将倾斜的表盘图像纠正为正视角;projectPoints()函数将 3D 点投影到 2D 图像平面,可用于表盘指针的姿态估计; - 姿态估计:
solvePnP()函数通过 3D 目标点与 2D 图像点的对应关系,计算目标的姿态(旋转向量rvec、平移向量tvec),可用于表盘的空间姿态估计。 - 在系统中的作用:工业相机通常存在径向畸变与切向畸变,通过
calibrateCamera()标定相机参数后,undistort()可消除畸变,确保表盘图像的几何准确性;对于倾斜放置的表盘,findHomography()计算透视变换矩阵,将其纠正为正视角,为后续刻度分割与识别提供高质量输入。
3.2 `aruco.hpp`:ArUco 标记检测与姿态估计
- 代码功能:提供基于 ArUco 标记的目标检测与姿态估计能力,支持快速定位表盘区域并计算其空间姿态。
- 标记检测:
detectMarkers()函数检测图像中的 ArUco 标记,返回标记的角点(corners)与标识(ids); - 姿态估计:
estimatePoseSingleMarkers()函数通过标记的角点与尺寸,计算单个标记的姿态;estimatePoseBoard()函数支持基于 ArUco 棋盘的姿态估计,提升姿态估计的准确性; - 辅助功能:
drawDetectedMarkers()函数绘制检测到的标记,便于调试;refineDetectedMarkers()函数优化标记检测结果,提升检测准确性。 - 在系统中的作用:可在表盘边缘粘贴 ArUco 标记,
detectMarkers()快速定位表盘区域,estimatePoseSingleMarkers()计算表盘的空间姿态,为后续表盘纠正提供姿态信息;同时,ArUco 标记的检测结果可作为表盘区域分割的依据,排除背景干扰。
3.3 `bgsegm.hpp`:背景分割
- 代码功能:提供多种背景减法算法,支持从复杂工业背景中分离表盘前景。
- 算法实现:
BackgroundSubtractorMOG类基于混合高斯模型实现背景减法;BackgroundSubtractorGMG类基于灰度直方图实现背景减法,支持动态背景适应;BackgroundSubtractorCNT类基于计数机制实现背景减法,适合低算力设备; - 核心接口:
apply()函数输入当前图像,输出前景掩码(fgmask),其中前景像素值为 255,背景像素值为 0;getBackgroundImage()函数获取当前的背景模型图像。 - 在系统中的作用:工业场景下的表盘图像通常包含复杂背景(如管道、设备),
BackgroundSubtractor系列类可生成前景掩码,提取表盘区域,排除背景干扰,提升后续表盘检测与分割的准确性。
3.4 `bioinspired/` 目录:生物启发式视觉处理
- 代码功能:提供基于人类视觉系统的图像处理能力,支持图像增强、动态区域分割等,提升表盘图像的视觉质量。
retina.hpp:实现视网膜模型,支持图像的光谱白化、噪声抑制、亮度压缩,可增强表盘图像的细节(如刻度线、数字);retinafasttonemapping.hpp:实现快速色调映射,支持高动态范围(HDR)图像的色调压缩,适合工业场景下强光或弱光环境的表盘图像处理;transientareassegmentationmodule.hpp:实现动态区域分割,支持检测图像中的动态变化区域,可用于排除表盘图像中的运动干扰(如人员走动、设备振动)。- 在系统中的作用:工业场景下的光照条件复杂(如强光导致表盘反光、弱光导致细节模糊),
retina模块可增强表盘细节,retinafasttonemapping可优化光照不均的图像,提升后续刻度分割与识别的准确性。
四、核心模块协作流程:从配置加载到表盘识别
ppmeterpro 的核心流程围绕“配置驱动视觉处理”展开,YAML 配置解析模块与 OpenCV 视觉模块通过数据交互紧密协作,具体流程如下:
4.1 步骤 1:配置加载与参数初始化
- 系统启动时,通过
yaml-cpp的LoadFile("meter_config.yaml")函数加载 YAML 配置文件,解析为Node对象; - 通过
Node接口读取配置参数:
- 相机参数:cameraMatrix = node["camera"]["K"].as()、distCoeffs = node["camera"]["D"].as();
- 表盘检测参数:mincontourarea = node["detection"]["mincontourarea"].as()、threshold = node["detection"]["threshold"].as();
- 表盘识别参数:rangemin = node["meter"]["rangemin"].as()、rangemax = node["meter"]["rangemax"].as()、interval = node["meter"]["interval"].as(); - 将读取的参数初始化到对应的模块(如 OpenCV 的相机参数、检测阈值)。
4.2 步骤 2:图像采集与预处理
- 从工业相机采集表盘图像;
- 基于
calib3d模块的undistort()函数,使用相机内参与畸变系数消除图像畸变; - 基于
bgsegm模块的BackgroundSubtractor生成前景掩码,提取表盘区域; - (可选)基于
bioinspired模块的retina或retinafasttonemapping增强图像细节,优化光照不均问题。
4.3 步骤 3:表盘检测与纠正
- 基于
aruco模块的detectMarkers()检测表盘边缘的 ArUco 标记,定位表盘区域; - 若表盘倾斜,通过
calib3d模块的findHomography()计算透视变换矩阵,结合warpPerspective()函数将表盘纠正为正视角; - (可选)基于
calib3d模块的solvePnP()计算表盘的空间姿态,为后续指针角度计算提供参考。
4.4 步骤 4:刻度分割与识别
- 对纠正后的表盘图像进行预处理(灰度化、阈值分割),基于 OpenCV 的
findContours()提取刻度线、数字或指针的轮廓; - 对分割后的区域进行特征提取:
- 数字区域:使用 OCR 或模板匹配识别数字;
- 指针区域:基于calib3d模块的HoughLines()检测指针直线,计算指针角度; - 结合 YAML 配置中的表盘量程(
rangemin/rangemax)与刻度间隔(interval),计算表盘的实际读数。
4.5 步骤 5:结果输出与配置更新
- 输出表盘读数(如显示在界面、存储到数据库);
- (可选)若系统支持动态配置更新,通过
yaml-cpp的Dump()函数将修改后的参数(如优化后的检测阈值)序列化并写入配置文件,实现参数持久化。
五、代码设计优势与扩展性分析
5.1 设计优势
- 配置与逻辑解耦:通过 YAML 配置模块,所有可变参数(如相机参数、检测阈值、表盘量程)均存储在配置文件中,修改参数无需重新编译代码,极大提升系统对不同表盘类型的适配能力;
- 视觉能力丰富:基于 OpenCV 的成熟视觉模块,覆盖相机标定、图像校正、目标检测、背景分割等全流程能力,无需重复开发基础视觉算法,降低开发成本;
- 健壮性强:
yaml-cpp的异常体系与 OpenCV 的参数校验机制,确保系统在配置错误、图像异常等场景下可优雅报错,便于调试与维护; - 跨平台兼容:
yaml-cpp与 OpenCV 均为跨平台库,结合dll.h与noexcept.h的跨平台支持,系统可轻松部署于 Windows、Linux 等工业常用操作系统。
5.2 扩展性设计
- 新增表盘类型:仅需在 YAML 配置文件中添加新的表盘配置(如
meter: {type: "pointer", rangemin: 0, rangemax: 100, interval: 1}),无需修改核心代码; - 扩展视觉算法:若需新增深度学习-based 的数字识别,可在代码中新增
DeepLearningOCR类,通过 YAML 配置添加算法参数(如modelpath: "ocrmodel.onnx"),保持“配置驱动”的核心架构不变; - 新增硬件支持:若需支持新的工业相机,仅需在 YAML 中添加该相机的内参配置,无需修改相机采集与校正的核心逻辑。
六、总结
ppmeterpro 的代码体系以 YAML 配置解析 与 OpenCV 视觉处理 为双核心,通过清晰的模块划分与接口设计,实现了“配置驱动、视觉核心”的工业表盘识别方案。YAML 模块提供灵活的配置管理能力,支持复杂参数的解析与序列化;OpenCV 模块提供成熟的视觉处理能力,覆盖从图像校正到目标识别的全流程。两者的紧密协作,不仅确保了系统对不同工业场景、不同表盘类型的适配能力,还为后续功能扩展提供了良好的架构基础,是一套兼顾实用性与扩展性的工业级表盘识别解决方案。
opencv 表识别 工业表智能识别 数字式表盘识别,指针式表盘刻度识别,分为表检测,表盘纠正,刻度分割,刻度拉直识别 第一,检测表盘 第二,然后,把表盘区域 ROI 出来 第三,然后,送到分割模型中 把表盘中的指针和时刻,分割出来,然后,把圆形表盘,拉直,拉成一条线,看当时时刻在 哪条线,把表盘中的指针和时刻,分割出来,分割出来的是圆形的,分割出来的,只有刻度 和指针,但是是圆形的,拉成直线,圆,变换成直线,然后,看当前指针指到哪个刻度

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 8
8 0
0- 0



 已为社区贡献70条内容
已为社区贡献70条内容

所有评论(0)