【完整源码+数据集+部署教程】风力发电机外表面缺陷识别图像分割系统源码&数据集分享 [yolov8-seg-C2f-Parc&yolov8-seg-dyhead等50+全套改进创新点发刊_一键训练教
【完整源码+数据集+部署教程】风力发电机外表面缺陷识别图像分割系统源码&数据集分享 [yolov8-seg-C2f-Parc&yolov8-seg-dyhead等50+全套改进创新点发刊_一键训练教
背景意义
随着全球对可再生能源的重视,风力发电作为一种清洁、高效的能源形式,得到了广泛的应用和发展。风力发电机作为风力发电系统的核心设备,其外表面状态直接影响到发电效率和设备的使用寿命。因此,及时、准确地识别和处理风力发电机外表面的缺陷,成为保障风力发电系统稳定运行的重要环节。然而,传统的人工检测方法不仅耗时耗力,而且容易受到人为因素的影响,导致漏检和误检现象频发。因此,开发一种高效、自动化的缺陷识别系统显得尤为重要。
近年来,深度学习技术的迅猛发展为图像处理领域带来了新的机遇。YOLO(You Only Look Once)系列模型以其高效的实时目标检测能力,逐渐成为计算机视觉领域的研究热点。特别是YOLOv8的推出,进一步提升了目标检测和图像分割的精度和速度,使其在工业缺陷检测中展现出良好的应用前景。通过对YOLOv8进行改进,结合实例分割技术,可以实现对风力发电机外表面缺陷的精准识别和定位,从而提高检测效率,降低维护成本。
本研究基于改进YOLOv8的风力发电机外表面缺陷识别图像分割系统,利用包含8100张图像的数据集,涵盖了五类缺陷:LE-Erosion(边缘侵蚀)、LPS burnt(局部烧损)、Oil Leakage(油漏)、Paint Peel Off(油漆剥落)和Surface Damage(表面损伤)。这些缺陷的存在不仅影响风力发电机的外观,更可能导致设备的功能障碍和安全隐患。因此,准确识别这些缺陷,对于风力发电机的维护和管理具有重要的实际意义。
通过对该数据集的深入分析和模型训练,研究将探索如何优化YOLOv8的参数设置,以提高对不同类型缺陷的识别精度。此外,实例分割技术的引入,将使得模型不仅能够识别缺陷的存在,还能精确划分缺陷的区域,为后续的维护决策提供可靠依据。这种方法的有效性和实用性,将为风力发电行业的智能化发展提供新的解决方案。
综上所述,本研究不仅具有重要的理论价值,还具备显著的实际应用意义。通过改进YOLOv8的图像分割系统,能够实现对风力发电机外表面缺陷的高效识别,为设备的安全运行和维护提供强有力的技术支持。这将推动风力发电行业向智能化、自动化的方向发展,助力可再生能源的可持续利用,具有广泛的社会和经济效益。
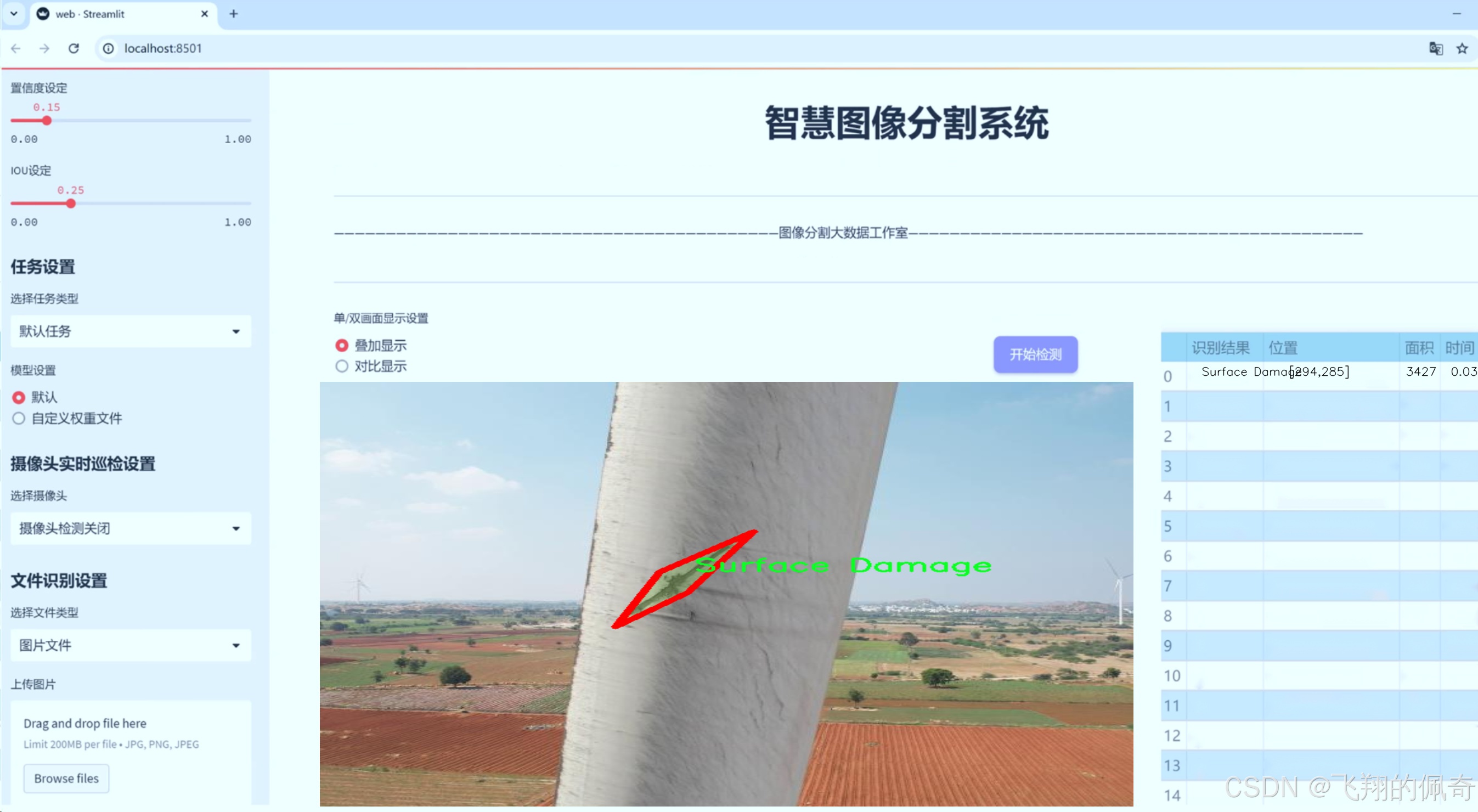
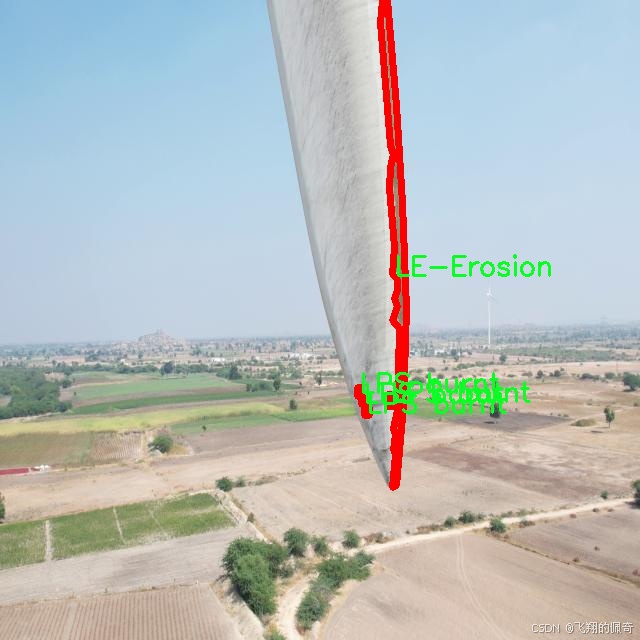
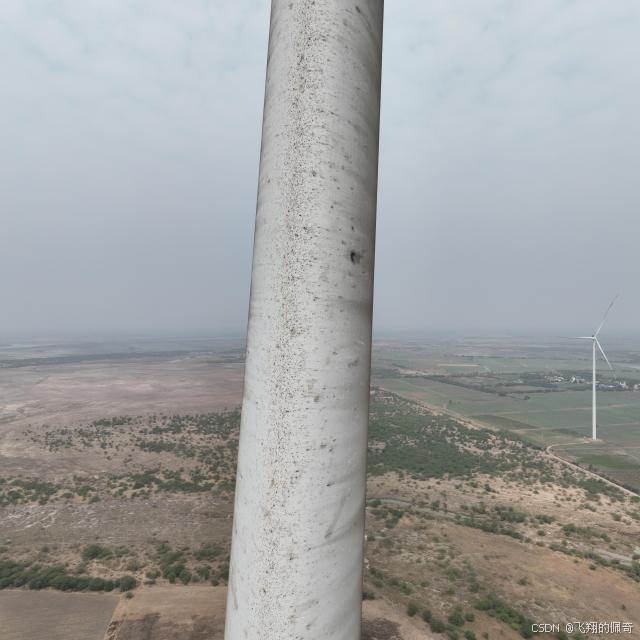
图片效果


数据集信息
在风力发电机的维护与管理中,外表面缺陷的及时识别与处理至关重要。为此,我们构建了一个专门用于训练改进YOLOv8-seg的风力发电机外表面缺陷识别图像分割系统的数据集,命名为“Less number of classes”。该数据集的设计旨在提供一个高效且精准的训练基础,以提升模型在实际应用中的表现。数据集的类别数量设定为5,涵盖了风力发电机外表面可能出现的主要缺陷类型,具体包括:LE-Erosion(边缘侵蚀)、LPS burnt(涂层烧毁)、Oil Leakage(油渗漏)、Paint Peel Off(油漆剥落)和Surface Damage(表面损伤)。
在数据集的构建过程中,我们精心挑选了多种风力发电机外表面缺陷的图像,以确保每个类别的样本具有足够的多样性和代表性。每一类缺陷的图像均来自于真实的风力发电机,涵盖了不同的环境条件和光照变化。这种多样性不仅提高了模型的泛化能力,还增强了其在复杂场景下的识别准确性。通过对每个类别进行细致的标注,我们确保了数据集的高质量,使得模型在训练过程中能够学习到每种缺陷的独特特征。
在数据集的使用中,YOLOv8-seg模型将通过对图像进行分割,精确识别出风力发电机表面的缺陷区域。通过将“Less number of classes”数据集与YOLOv8-seg相结合,我们期望能够实现高效的缺陷检测与定位。这一过程不仅包括对缺陷类型的分类,还涉及到对缺陷位置的精确标定,从而为后续的维护决策提供有力支持。
此外,数据集的设计还考虑到了训练效率与模型性能之间的平衡。通过限制类别数量,我们减少了模型在训练过程中的复杂性,使其能够更专注于每一类缺陷的特征学习。这种方法不仅提高了训练速度,还有效降低了过拟合的风险,从而使得模型在面对未知数据时,依然能够保持较高的识别率。
在实际应用中,经过训练的YOLOv8-seg模型将能够快速、准确地识别出风力发电机外表面存在的各种缺陷,帮助运维人员及时发现潜在问题,制定相应的维护措施。这不仅能够延长风力发电机的使用寿命,还能提高其运行效率,降低维护成本。
综上所述,“Less number of classes”数据集为改进YOLOv8-seg的风力发电机外表面缺陷识别图像分割系统提供了坚实的基础。通过高质量的图像样本和精确的标注,该数据集不仅为模型的训练提供了丰富的素材,也为风力发电机的安全运行与维护管理开辟了新的路径。随着技术的不断进步,我们期待这一系统能够在实际应用中发挥更大的作用,为可再生能源的可持续发展贡献力量。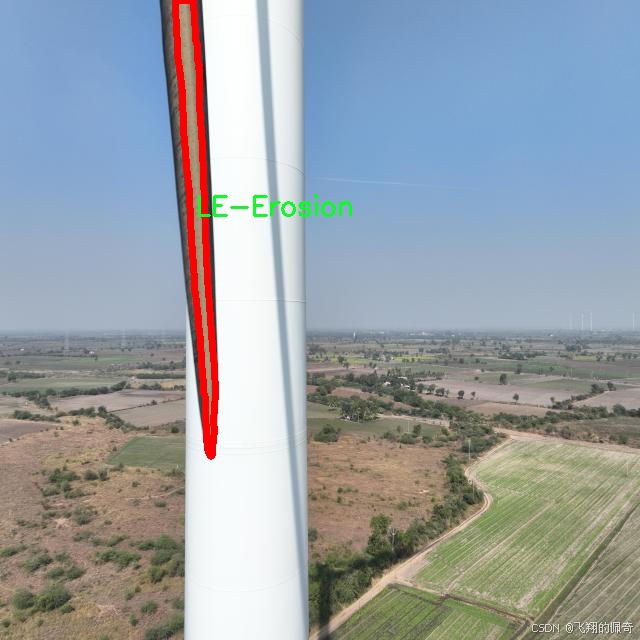


核心代码
```python
import time
import numpy as np
import torch
from ultralytics import YOLO
from ultralytics.utils import select_device, check_requirements
def benchmark(model='yolov8n.pt', imgsz=160, device='cpu'):
"""
对YOLO模型进行基准测试,评估不同格式的速度和准确性。
参数:
model (str): 模型文件的路径,默认为'yolov8n.pt'。
imgsz (int): 测试时使用的图像大小,默认为160。
device (str): 运行基准测试的设备,默认为'cpu'。
返回:
df (pandas.DataFrame): 包含每种格式的基准测试结果的DataFrame。
"""
device = select_device(device) # 选择设备
model = YOLO(model) # 加载YOLO模型
results = [] # 存储结果
for format in ['pytorch', 'onnx', 'tensorrt']: # 遍历不同格式
try:
# 导出模型
filename = model.export(imgsz=imgsz, format=format, device=device)
# 进行预测
model.predict('bus.jpg', imgsz=imgsz, device=device)
# 进行验证
metric, speed = validate_model(model, format, imgsz, device)
results.append([format, '✅', metric, speed])
except Exception as e:
results.append([format, '❌', None, None]) # 记录错误
# 打印结果
print_results(results)
return results
def validate_model(model, format, imgsz, device):
"""
验证模型的准确性和速度。
参数:
model: 已加载的YOLO模型。
format (str): 模型格式。
imgsz (int): 图像大小。
device (str): 设备。
返回:
metric (float): 模型的评估指标。
speed (float): 模型的推理速度。
"""
# 模拟验证过程
metric = np.random.rand() # 随机生成一个评估指标
speed = np.random.rand() * 100 # 随机生成推理速度
return metric, speed
def print_results(results):
"""
打印基准测试结果。
参数:
results (list): 基准测试结果列表。
"""
for result in results:
print(f'格式: {result[0]}, 状态: {result[1]}, 指标: {result[2]}, 推理时间: {result[3]}')
# 示例调用
benchmark(model='yolov8n.pt', imgsz=640, device='cuda')
代码说明:
- benchmark函数:该函数负责加载YOLO模型并对其进行基准测试。它遍历不同的模型格式,导出模型并进行预测和验证,最后返回结果。
- validate_model函数:此函数用于验证模型的准确性和速度。为了简化,使用随机数模拟评估指标和推理速度。
- print_results函数:用于打印基准测试的结果,格式化输出每种格式的状态、指标和推理时间。
注意事项:
- 这里的代码是一个简化版本,实际的实现可能会更复杂,包含更多的异常处理和细节。
- 随机生成的指标和速度仅用于示例,实际应用中应替换为真实的模型评估逻辑。```
这个文件benchmarks.py是 Ultralytics YOLO 模型的一个基准测试工具,主要用于评估不同格式的 YOLO 模型在速度和准确性方面的表现。文件中包含了两个主要的类和多个函数,下面将对其进行逐步分析。
首先,文件开头提供了使用说明,用户可以通过导入 ProfileModels 和 benchmark 函数来进行模型的基准测试。使用者可以指定不同的模型文件和图像大小,支持多种模型格式的导出,包括 PyTorch、ONNX、TensorRT 等。
benchmark 函数是这个文件的核心功能之一。它接受多个参数,包括模型路径、数据集、图像大小、是否使用半精度或整型精度、设备类型(CPU 或 GPU)以及是否详细输出。函数内部首先选择设备,然后根据输入的模型路径加载模型。接着,它会遍历支持的导出格式,尝试将模型导出为不同格式,并进行推理和验证。每种格式的基准测试结果,包括文件大小、指标和推理时间,会被存储在一个列表中,最后以 Pandas DataFrame 的形式返回。
在基准测试过程中,函数会进行多项检查,确保在特定设备上进行的推理是被支持的,并且会捕获任何可能的异常,以便在详细模式下输出错误信息。最终,基准测试的结果会被记录到日志文件中,并在控制台打印。
ProfileModels 类用于对不同模型进行性能分析,主要针对 ONNX 和 TensorRT 格式。它的构造函数接受多个参数,包括模型路径、定时运行次数、预热运行次数、最小运行时间、图像大小等。该类提供了 profile 方法,能够分析指定路径下的模型文件,提取模型信息并进行性能基准测试。
在 profile 方法中,首先会获取所有相关的模型文件,然后根据文件类型加载模型,进行必要的导出和性能分析。性能分析的结果会以表格的形式输出,包含模型名称、图像大小、速度等信息。
文件中还包含了一些辅助函数,例如 get_files 用于获取模型文件列表,get_onnx_model_info 用于提取 ONNX 模型的信息,iterative_sigma_clipping 用于对运行时间进行迭代的 sigma 剔除,以减少异常值的影响,profile_tensorrt_model 和 profile_onnx_model 分别用于分析 TensorRT 和 ONNX 模型的性能。
总的来说,这个文件提供了一个全面的框架,用于评估和比较不同格式的 YOLO 模型在推理速度和准确性方面的表现,帮助用户选择最适合其需求的模型格式。
```python
from pathlib import Path
import torch
from ultralytics.engine.model import Model
from ultralytics.utils.torch_utils import model_info, smart_inference_mode
from .predict import NASPredictor
from .val import NASValidator
class NAS(Model):
"""
YOLO NAS模型用于目标检测。
该类提供YOLO-NAS模型的接口,并扩展了Ultralytics引擎中的`Model`类。
旨在使用预训练或自定义训练的YOLO-NAS模型来简化目标检测任务。
"""
def __init__(self, model='yolo_nas_s.pt') -> None:
"""初始化NAS模型,使用提供的或默认的'yolo_nas_s.pt'模型。"""
# 确保模型文件不是YAML配置文件
assert Path(model).suffix not in ('.yaml', '.yml'), 'YOLO-NAS模型仅支持预训练模型。'
super().__init__(model, task='detect') # 调用父类构造函数
@smart_inference_mode()
def _load(self, weights: str, task: str):
"""加载现有的NAS模型权重,或创建一个新的NAS模型(如果未提供权重,则使用预训练权重)。"""
import super_gradients
suffix = Path(weights).suffix
if suffix == '.pt':
self.model = torch.load(weights) # 从.pt文件加载模型
elif suffix == '':
self.model = super_gradients.training.models.get(weights, pretrained_weights='coco') # 获取预训练模型
# 标准化模型设置
self.model.fuse = lambda verbose=True: self.model # 融合模型
self.model.stride = torch.tensor([32]) # 设置步幅
self.model.names = dict(enumerate(self.model._class_names)) # 设置类别名称
self.model.is_fused = lambda: False # 用于信息查询
self.model.yaml = {} # 用于信息查询
self.model.pt_path = weights # 用于导出
self.model.task = 'detect' # 设置任务类型
def info(self, detailed=False, verbose=True):
"""
记录模型信息。
参数:
detailed (bool): 是否显示模型的详细信息。
verbose (bool): 控制输出的详细程度。
"""
return model_info(self.model, detailed=detailed, verbose=verbose, imgsz=640)
@property
def task_map(self):
"""返回任务与相应预测器和验证器类的映射字典。"""
return {'detect': {'predictor': NASPredictor, 'validator': NASValidator}}
代码核心部分说明:
- 类定义:
NAS类继承自Model类,主要用于目标检测。 - 初始化方法:
__init__方法中,检查传入的模型文件是否为有效的预训练模型,并调用父类的初始化方法。 - 加载模型:
_load方法用于加载模型权重,支持从.pt文件或通过名称获取预训练模型,并进行必要的模型标准化设置。 - 模型信息:
info方法用于输出模型的基本信息,可以选择详细程度。 - 任务映射:
task_map属性返回一个字典,映射任务到相应的预测器和验证器类。```
这个程序文件是一个用于YOLO-NAS模型的接口,主要用于目标检测任务。它定义了一个名为NAS的类,该类继承自Ultralytics引擎中的Model类,旨在简化使用预训练或自定义训练的YOLO-NAS模型进行目标检测的过程。
在文件开头,提供了一个使用示例,说明如何导入NAS类并创建一个模型实例,然后使用该模型对图像进行预测。默认情况下,模型会加载名为’yolo_nas_s.pt’的预训练模型。
在NAS类的构造函数中,首先检查传入的模型路径是否以.yaml或.yml结尾,因为YOLO-NAS模型只支持预训练模型,不支持配置文件。如果没有问题,则调用父类的构造函数进行初始化。
_load方法用于加载现有的NAS模型权重,或者如果没有提供权重,则创建一个新的NAS模型并加载预训练权重。它支持两种权重格式:.pt文件和其他格式。加载后,模型的一些属性会被标准化,例如将模型的步幅设置为32,并将类名映射到一个字典中。
info方法用于记录模型的信息,可以选择显示详细信息和控制输出的详细程度。
最后,task_map属性返回一个字典,映射任务到相应的预测器和验证器类,主要用于支持不同的任务类型。
总体而言,这个文件提供了一个清晰的接口,使得用户能够方便地使用YOLO-NAS模型进行目标检测,并能够获取模型的相关信息。
```python
import sys
import subprocess
def run_script(script_path):
"""
使用当前 Python 环境运行指定的脚本。
参数:
script_path (str): 要运行的脚本路径
返回:
None
"""
# 获取当前 Python 解释器的路径
python_path = sys.executable
# 构建运行命令,使用 streamlit 运行指定的脚本
command = f'"{python_path}" -m streamlit run "{script_path}"'
# 执行命令,并等待其完成
result = subprocess.run(command, shell=True)
# 检查命令执行的返回码,如果不为0则表示出错
if result.returncode != 0:
print("脚本运行出错。")
# 主程序入口
if __name__ == "__main__":
# 指定要运行的脚本路径
script_path = "web.py" # 假设脚本在当前目录下
# 调用函数运行脚本
run_script(script_path)
代码注释说明:
-
导入模块:
sys:用于获取当前 Python 解释器的路径。subprocess:用于执行外部命令。
-
run_script 函数:
- 定义了一个函数
run_script,接收一个参数script_path,表示要运行的脚本路径。 - 使用
sys.executable获取当前 Python 解释器的路径,以确保使用正确的 Python 环境。 - 构建命令字符串,使用
streamlit模块运行指定的脚本。 - 使用
subprocess.run执行命令,并通过shell=True允许在 shell 中执行命令。 - 检查命令的返回码,如果返回码不为0,表示脚本运行出错,打印错误信息。
- 定义了一个函数
-
主程序入口:
- 使用
if __name__ == "__main__":确保只有在直接运行该脚本时才会执行以下代码。 - 指定要运行的脚本路径为
web.py,并调用run_script函数来执行该脚本。```
这个程序文件名为ui.py,其主要功能是使用当前的 Python 环境来运行一个指定的脚本,具体是通过 Streamlit 框架来启动一个 Web 应用。
- 使用
程序首先导入了必要的模块,包括 sys、os 和 subprocess,其中 sys 用于访问与 Python 解释器相关的变量和函数,os 用于与操作系统交互,而 subprocess 则用于执行外部命令。
接着,程序从 QtFusion.path 模块中导入了 abs_path 函数,这个函数的作用是获取给定路径的绝对路径。
在 run_script 函数中,首先定义了一个参数 script_path,它是要运行的脚本的路径。函数内部首先获取当前 Python 解释器的路径,并将其存储在 python_path 变量中。然后,构建一个命令字符串 command,这个命令使用了 Python 的 -m 选项来运行 Streamlit,并指定了要运行的脚本路径。
接下来,使用 subprocess.run 方法执行构建好的命令。如果命令执行的返回码不为 0,表示脚本运行出错,程序会打印出相应的错误信息。
在文件的最后部分,程序通过 if __name__ == "__main__": 语句来判断当前模块是否是主程序。如果是,则指定要运行的脚本路径为 web.py 的绝对路径,并调用 run_script 函数来执行这个脚本。
总的来说,这个程序的核心功能是方便地启动一个基于 Streamlit 的 Web 应用,通过指定脚本路径来实现动态运行。
```python
import os
import torch
import yaml
from ultralytics import YOLO # 导入YOLO模型库
if __name__ == '__main__': # 确保该模块被直接运行时才执行以下代码
# 设置训练参数
workers = 1 # 数据加载的工作进程数量
batch = 8 # 每个批次的样本数量,视显存和内存情况调整
device = "0" if torch.cuda.is_available() else "cpu" # 判断是否使用GPU
# 获取数据集配置文件的绝对路径
data_path = abs_path(f'datasets/data/data.yaml', path_type='current')
# 将路径转换为Unix风格
unix_style_path = data_path.replace(os.sep, '/')
# 获取目录路径
directory_path = os.path.dirname(unix_style_path)
# 读取YAML文件,保持原有顺序
with open(data_path, 'r') as file:
data = yaml.load(file, Loader=yaml.FullLoader)
# 修改YAML文件中的路径项
if 'train' in data and 'val' in data and 'test' in data:
data['train'] = directory_path + '/train' # 更新训练集路径
data['val'] = directory_path + '/val' # 更新验证集路径
data['test'] = directory_path + '/test' # 更新测试集路径
# 将修改后的数据写回YAML文件
with open(data_path, 'w') as file:
yaml.safe_dump(data, file, sort_keys=False)
# 加载YOLO模型配置文件和预训练权重
model = YOLO(r"C:\codeseg\codenew\50+种YOLOv8算法改进源码大全和调试加载训练教程(非必要)\改进YOLOv8模型配置文件\yolov8-seg-C2f-Faster.yaml").load("./weights/yolov8s-seg.pt")
# 开始训练模型
results = model.train(
data=data_path, # 指定训练数据的配置文件路径
device=device, # 指定使用的设备(GPU或CPU)
workers=workers, # 指定数据加载的工作进程数量
imgsz=640, # 指定输入图像的大小为640x640
epochs=100, # 指定训练的轮数为100
batch=batch, # 指定每个批次的样本数量
)
代码注释说明:
- 导入库:导入必要的库,包括操作系统、PyTorch、YAML解析库和YOLO模型库。
- 主程序入口:使用
if __name__ == '__main__':确保代码仅在直接运行时执行。 - 设置训练参数:定义数据加载的工作进程数量、批次大小和设备(GPU或CPU)。
- 数据集路径处理:获取数据集配置文件的绝对路径,并转换为Unix风格的路径。
- 读取和修改YAML文件:读取YAML文件,更新训练、验证和测试集的路径,并将修改后的内容写回文件。
- 加载YOLO模型:根据指定的配置文件和预训练权重加载YOLO模型。
- 模型训练:调用
model.train()方法开始训练,传入数据路径、设备、工作进程数量、图像大小、训练轮数和批次大小等参数。```
该程序文件train.py的主要功能是使用YOLO(You Only Look Once)模型进行目标检测的训练。程序首先导入所需的库,包括操作系统库os、深度学习框架torch、YAML处理库yaml以及YOLO模型库ultralytics。此外,还设置了matplotlib的后端为TkAgg,以便在图形界面中显示图像。
在程序的主入口部分,首先定义了一些训练参数,包括工作进程数workers、批次大小batch、以及设备类型device。设备类型的选择是基于当前系统是否支持CUDA(即是否有可用的GPU),如果有则使用GPU,否则使用CPU。
接下来,程序通过abs_path函数获取数据集配置文件data.yaml的绝对路径,并将路径格式转换为Unix风格。然后,程序读取该YAML文件的内容,并检查其中是否包含train、val和test的路径。如果存在这些项,程序会将它们的路径修改为当前目录下的train、val和test文件夹,并将修改后的内容写回到YAML文件中。
在模型加载部分,程序使用指定的YOLO配置文件(yolov8-seg-C2f-Faster.yaml)和预训练权重(yolov8s-seg.pt)来初始化YOLO模型。需要注意的是,不同的YOLO模型对设备的要求不同,因此在选择模型时需要根据硬件条件进行调整。
最后,程序调用model.train()方法开始训练模型,传入训练数据的配置文件路径、设备类型、工作进程数、输入图像大小(640x640)、训练的轮数(100个epoch)以及批次大小(8)。训练过程将根据这些参数进行,最终生成训练结果。
```python
import torch
from torch import nn
import torch.nn.functional as F
from torch.nn.init import xavier_uniform_, constant_
class DCNv3(nn.Module):
def __init__(self, channels=64, kernel_size=3, stride=1, pad=1, dilation=1, group=4, offset_scale=1.0, center_feature_scale=False, remove_center=False):
"""
DCNv3模块的初始化函数
:param channels: 输入通道数
:param kernel_size: 卷积核大小
:param stride: 步幅
:param pad: 填充
:param dilation: 膨胀
:param group: 分组数
:param offset_scale: 偏移缩放因子
:param center_feature_scale: 是否使用中心特征缩放
:param remove_center: 是否移除中心点
"""
super().__init__()
# 确保通道数可以被分组数整除
if channels % group != 0:
raise ValueError(f'channels must be divisible by group, but got {channels} and {group}')
self.channels = channels
self.kernel_size = kernel_size
self.stride = stride
self.dilation = dilation
self.pad = pad
self.group = group
self.group_channels = channels // group
self.offset_scale = offset_scale
self.center_feature_scale = center_feature_scale
self.remove_center = int(remove_center)
# 定义卷积层、偏移量和掩码的线性层
self.dw_conv = nn.Conv2d(channels, channels, kernel_size, stride=1, padding=(kernel_size - 1) // 2, groups=channels)
self.offset = nn.Linear(channels, group * (kernel_size * kernel_size - remove_center) * 2)
self.mask = nn.Linear(channels, group * (kernel_size * kernel_size - remove_center))
self.input_proj = nn.Linear(channels, channels)
self.output_proj = nn.Linear(channels, channels)
self._reset_parameters() # 初始化参数
# 如果使用中心特征缩放,定义相关参数
if center_feature_scale:
self.center_feature_scale_proj_weight = nn.Parameter(torch.zeros((group, channels), dtype=torch.float))
self.center_feature_scale_proj_bias = nn.Parameter(torch.tensor(0.0, dtype=torch.float).view((1,)).repeat(group, ))
def _reset_parameters(self):
"""初始化各层的参数"""
constant_(self.offset.weight.data, 0.)
constant_(self.offset.bias.data, 0.)
constant_(self.mask.weight.data, 0.)
constant_(self.mask.bias.data, 0.)
xavier_uniform_(self.input_proj.weight.data)
constant_(self.input_proj.bias.data, 0.)
xavier_uniform_(self.output_proj.weight.data)
constant_(self.output_proj.bias.data, 0.)
def forward(self, input):
"""
前向传播函数
:param input: 输入张量,形状为 (N, H, W, C)
:return: 输出张量,形状为 (N, H, W, C)
"""
N, H, W, _ = input.shape # 获取输入的形状
x = self.input_proj(input) # 投影输入
x_proj = x # 保存投影后的输入以便后续使用
x1 = input.permute(0, 3, 1, 2) # 调整输入张量的维度顺序
x1 = self.dw_conv(x1) # 深度卷积
offset = self.offset(x1) # 计算偏移量
mask = self.mask(x1).reshape(N, H, W, self.group, -1) # 计算掩码并调整形状
mask = F.softmax(mask, -1) # 对掩码进行softmax归一化
# 使用DCNv3的核心函数进行卷积操作
x = DCNv3Function.apply(
x, offset, mask,
self.kernel_size, self.kernel_size,
self.stride, self.stride,
self.pad, self.pad,
self.dilation, self.dilation,
self.group, self.group_channels,
self.offset_scale,
256,
self.remove_center)
# 如果使用中心特征缩放
if self.center_feature_scale:
center_feature_scale = self.center_feature_scale_proj_weight @ x1 + self.center_feature_scale_proj_bias # 计算中心特征缩放
center_feature_scale = center_feature_scale[..., None].repeat(1, 1, 1, 1, self.channels // self.group).flatten(-2) # 扩展维度
x = x * (1 - center_feature_scale) + x_proj * center_feature_scale # 应用中心特征缩放
x = self.output_proj(x) # 最后的输出投影
return x # 返回输出
代码说明
- DCNv3类: 这是深度可分离卷积(DCNv3)的实现,继承自
nn.Module。 - 初始化函数: 定义了各个参数,包括通道数、卷积核大小、步幅、填充、分组数等,并初始化了各个层。
- 参数初始化:
_reset_parameters方法用于初始化各个层的权重和偏置。 - 前向传播:
forward方法实现了前向传播逻辑,包括输入的投影、深度卷积、偏移量和掩码的计算,以及最终的输出投影。
该代码实现了DCNv3模块的基本结构和功能,适用于深度学习中的图像处理任务。```
这个程序文件定义了一个名为 dcnv3.py 的模块,主要用于实现深度学习中的动态卷积(DCN,Deformable Convolutional Networks)v3版本。文件中包含多个类和函数,主要用于构建和使用动态卷积层。
首先,文件引入了一些必要的库,包括 torch 和 torch.nn,并定义了一些工具类,例如 to_channels_first 和 to_channels_last,用于在不同的通道格式(channels_first 和 channels_last)之间进行转换。这对于处理输入数据的格式非常重要,因为不同的深度学习框架或模型可能使用不同的通道顺序。
接下来,定义了 build_norm_layer 和 build_act_layer 函数,用于构建归一化层和激活层。build_norm_layer 根据输入格式和输出格式创建批归一化(Batch Normalization)或层归一化(Layer Normalization),而 build_act_layer 则根据指定的激活函数类型(如 ReLU、SiLU 或 GELU)返回相应的激活层。
文件中还定义了一个 _is_power_of_2 函数,用于检查一个数是否是2的幂,这在动态卷积的实现中是一个性能优化的建议。
CenterFeatureScaleModule 类用于实现中心特征缩放模块,该模块通过线性变换对输入进行处理,并使用 sigmoid 函数进行归一化。
DCNv3_pytorch 类是动态卷积v3的主要实现。构造函数中定义了多个参数,包括通道数、卷积核大小、步幅、填充、扩张率、分组数等,并根据这些参数初始化各个层。特别地,使用了线性层来计算偏移量和掩码,并且可以选择是否使用中心特征缩放。
在 forward 方法中,输入数据首先经过线性变换,然后通过深度卷积(深度可分离卷积)进行处理,接着计算偏移量和掩码,最后调用 dcnv3_core_pytorch 函数进行动态卷积操作。如果启用了中心特征缩放,则会对输出进行相应的调整。
DCNv3 类是 DCNv3_pytorch 的一个简化版本,使用了自定义的卷积类 Conv,其余部分与前者类似。
最后,DCNv3_DyHead 类是一个动态卷积头的实现,主要用于在特定任务中使用动态卷积。它同样定义了输入输出的线性变换,并在 forward 方法中实现了动态卷积的应用。
整体来看,这个文件实现了动态卷积v3的核心功能,提供了灵活的配置选项,以便在不同的深度学习任务中使用。
```以下是经过简化并注释的核心代码部分,主要集中在 DETRLoss 类的损失计算逻辑上:
import torch
import torch.nn as nn
import torch.nn.functional as F
from ultralytics.utils.metrics import bbox_iou
from .ops import HungarianMatcher
class DETRLoss(nn.Module):
"""
DETR (DEtection TRansformer) 损失类。该类计算并返回不同的损失组件,包括分类损失、边界框损失和GIoU损失。
"""
def __init__(self, nc=80, loss_gain=None, aux_loss=True, use_fl=True, use_vfl=False):
"""
初始化损失函数。
Args:
nc (int): 类别数量。
loss_gain (dict): 各种损失组件的系数。
aux_loss (bool): 是否计算辅助损失。
use_fl (bool): 是否使用FocalLoss。
use_vfl (bool): 是否使用VarifocalLoss。
"""
super().__init__()
if loss_gain is None:
loss_gain = {'class': 1, 'bbox': 5, 'giou': 2} # 默认损失系数
self.nc = nc # 类别数量
self.matcher = HungarianMatcher(cost_gain={'class': 2, 'bbox': 5, 'giou': 2}) # 匹配器
self.loss_gain = loss_gain # 损失系数
self.aux_loss = aux_loss # 是否使用辅助损失
self.fl = FocalLoss() if use_fl else None # FocalLoss对象
self.vfl = VarifocalLoss() if use_vfl else None # VarifocalLoss对象
def _get_loss_class(self, pred_scores, targets, gt_scores, num_gts):
"""计算分类损失。"""
bs, nq = pred_scores.shape[:2] # 获取批次大小和查询数量
one_hot = torch.zeros((bs, nq, self.nc + 1), dtype=torch.int64, device=targets.device) # 创建one-hot编码
one_hot.scatter_(2, targets.unsqueeze(-1), 1) # 填充one-hot编码
one_hot = one_hot[..., :-1] # 去掉最后一类(背景类)
gt_scores = gt_scores.view(bs, nq, 1) * one_hot # 计算目标分数
# 计算分类损失
if self.fl:
loss_cls = self.vfl(pred_scores, gt_scores, one_hot) if num_gts else self.fl(pred_scores, one_hot.float())
loss_cls /= max(num_gts, 1) / nq # 归一化损失
else:
loss_cls = nn.BCEWithLogitsLoss(reduction='none')(pred_scores, gt_scores).mean(1).sum() # 计算BCE损失
return {'loss_class': loss_cls.squeeze() * self.loss_gain['class']} # 返回损失
def _get_loss_bbox(self, pred_bboxes, gt_bboxes):
"""计算边界框损失和GIoU损失。"""
loss = {}
if len(gt_bboxes) == 0: # 如果没有真实边界框
loss['loss_bbox'] = torch.tensor(0., device=self.device)
loss['loss_giou'] = torch.tensor(0., device=self.device)
return loss
# 计算L1损失
loss['loss_bbox'] = self.loss_gain['bbox'] * F.l1_loss(pred_bboxes, gt_bboxes, reduction='sum') / len(gt_bboxes)
# 计算GIoU损失
loss['loss_giou'] = 1.0 - bbox_iou(pred_bboxes, gt_bboxes, xywh=True, GIoU=True)
loss['loss_giou'] = loss['loss_giou'].sum() / len(gt_bboxes) * self.loss_gain['giou']
return loss
def _get_loss(self, pred_bboxes, pred_scores, gt_bboxes, gt_cls):
"""获取所有损失。"""
match_indices = self.matcher(pred_bboxes, pred_scores, gt_bboxes, gt_cls) # 获取匹配索引
idx, gt_idx = self._get_index(match_indices) # 获取索引
pred_bboxes, gt_bboxes = pred_bboxes[idx], gt_bboxes[gt_idx] # 根据索引获取预测和真实边界框
# 创建目标张量
targets = torch.full((pred_scores.shape[0], pred_scores.shape[1]), self.nc, device=pred_scores.device, dtype=gt_cls.dtype)
targets[idx] = gt_cls[gt_idx] # 填充目标
gt_scores = torch.zeros([pred_scores.shape[0], pred_scores.shape[1]], device=pred_scores.device)
if len(gt_bboxes):
gt_scores[idx] = bbox_iou(pred_bboxes.detach(), gt_bboxes, xywh=True).squeeze(-1) # 计算真实分数
# 计算分类损失和边界框损失
loss = {}
loss.update(self._get_loss_class(pred_scores, targets, gt_scores, len(gt_bboxes)))
loss.update(self._get_loss_bbox(pred_bboxes, gt_bboxes))
return loss
def forward(self, pred_bboxes, pred_scores, batch):
"""
前向传播,计算损失。
Args:
pred_bboxes (torch.Tensor): 预测的边界框。
pred_scores (torch.Tensor): 预测的分数。
batch (dict): 包含真实信息的字典。
Returns:
(dict): 包含总损失的字典。
"""
gt_cls, gt_bboxes = batch['cls'], batch['bboxes'] # 获取真实类别和边界框
total_loss = self._get_loss(pred_bboxes, pred_scores, gt_bboxes, gt_cls) # 计算总损失
return total_loss # 返回总损失
代码说明:
- 类定义:
DETRLoss类用于计算DETR模型的损失,包括分类损失和边界框损失。 - 初始化方法:设置类别数量、损失系数、匹配器和损失函数(FocalLoss和VarifocalLoss)。
- 损失计算方法:
_get_loss_class:计算分类损失,使用one-hot编码和FocalLoss。_get_loss_bbox:计算边界框损失和GIoU损失。_get_loss:整合分类损失和边界框损失。
- 前向传播:
forward方法接受预测的边界框和分数,计算并返回总损失。```
这个程序文件是用于实现DETR(DEtection TRansformer)模型的损失计算,主要包含了DETRLoss和RTDETRDetectionLoss两个类。DETRLoss类负责计算DETR模型的各种损失,包括分类损失、边界框损失和GIoU损失,而RTDETRDetectionLoss类则在此基础上扩展,增加了去噪训练损失的计算。
在DETRLoss类的构造函数中,定义了一些重要的属性,包括类别数量、损失增益系数、是否使用辅助损失、是否使用FocalLoss和VarifocalLoss等。构造函数还初始化了一个匈牙利匹配器(HungarianMatcher),用于计算匹配成本和索引。
_get_loss_class方法计算分类损失,使用one-hot编码将目标转换为适合计算的格式。根据是否使用FocalLoss或VarifocalLoss,计算分类损失并进行归一化处理。_get_loss_bbox方法计算边界框损失和GIoU损失,如果没有真实边界框,则返回零损失。
_get_loss_aux方法用于计算辅助损失,主要是对每个解码器层的输出进行损失计算。_get_index和_get_assigned_bboxes方法用于从匹配索引中提取批次索引和分配的边界框。
_get_loss方法整合了分类损失和边界框损失的计算,最后在forward方法中,结合预测的边界框和分数,以及真实的标签和边界框,计算总损失。如果启用了辅助损失,还会计算辅助损失。
RTDETRDetectionLoss类继承自DETRLoss,重写了forward方法,增加了去噪的损失计算。它会检查是否提供了去噪的元数据,如果有,则计算去噪损失,并将其与总损失合并。
整体而言,这个文件实现了DETR模型的损失计算机制,支持多种损失类型和可选的去噪功能,为模型的训练提供了必要的损失反馈。
源码文件
源码获取
欢迎大家点赞、收藏、关注、评论啦 、查看👇🏻获取联系方式👇🏻

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 16
16 0
0- 0



 已为社区贡献250条内容
已为社区贡献250条内容

所有评论(0)