自动驾驶控制:二/三自由度动力学MPC实现任意路径跟踪的奇妙之旅
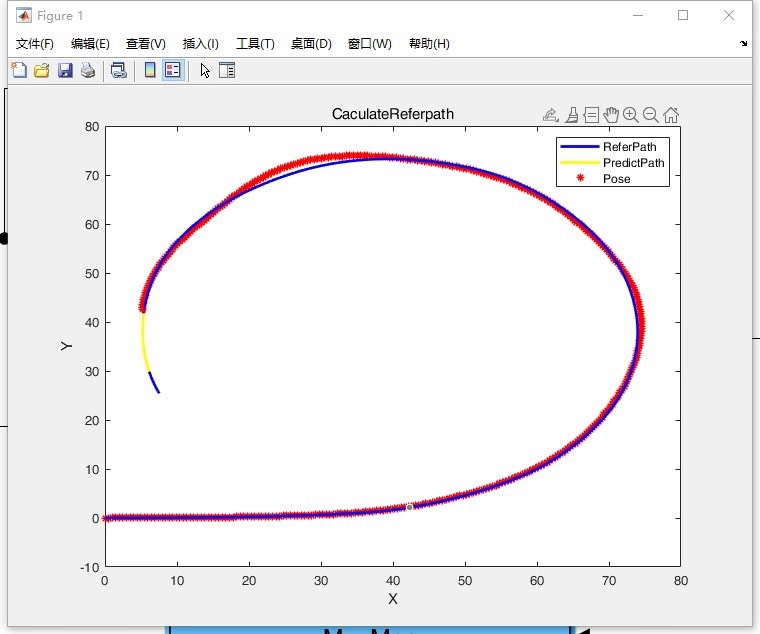
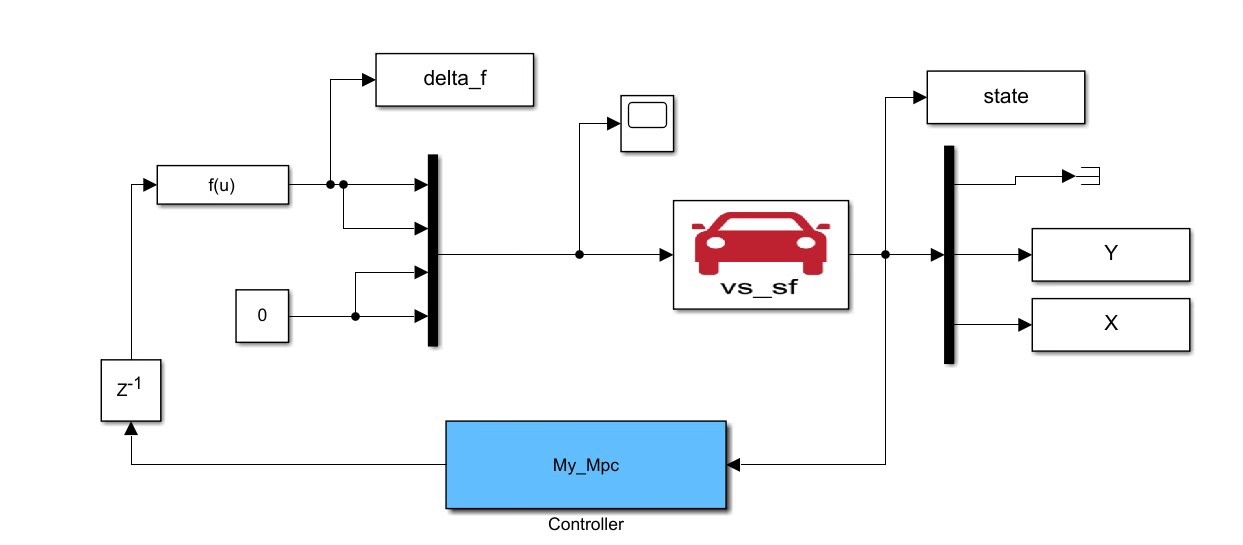
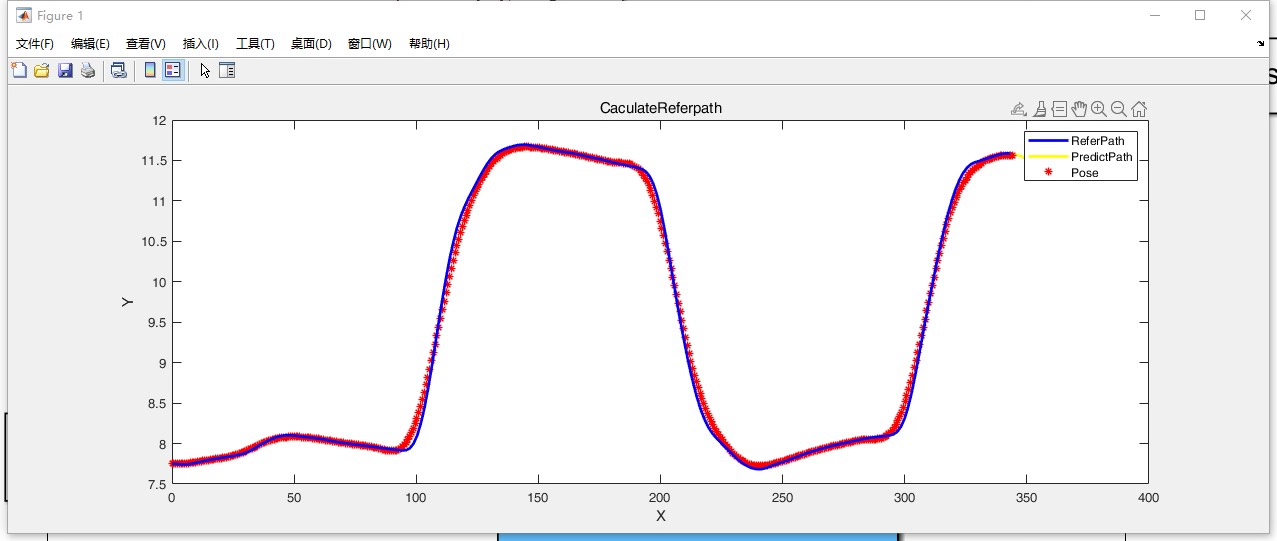
自动驾驶控制-二/三自由度动力学MPC任意路径跟踪 是可以跟踪各种自定义路径,可以自己更改参考路径的 carsim和simulink联合仿真,基于车辆二自由度动力学模型的mpc跟踪任意路径。 蓝色为全局参考路径,黄色为预测时域内的 参考路径,红色为车辆行驶轨迹。
在自动驾驶领域,路径跟踪是核心任务之一。今天咱们就来聊聊基于车辆二自由度动力学模型,借助MPC(模型预测控制)实现任意路径跟踪,并且通过Carsim和Simulink联合仿真来验证这一过程。
可自定义的神奇路径跟踪
我们的目标是让车辆能够跟踪各种自定义路径,并且可以随心所欲地更改参考路径。想象一下,无论是蜿蜒曲折的山路,还是城市中复杂的街道布局,车辆都能精准按照设定路径行驶,这背后的技术魅力十足。
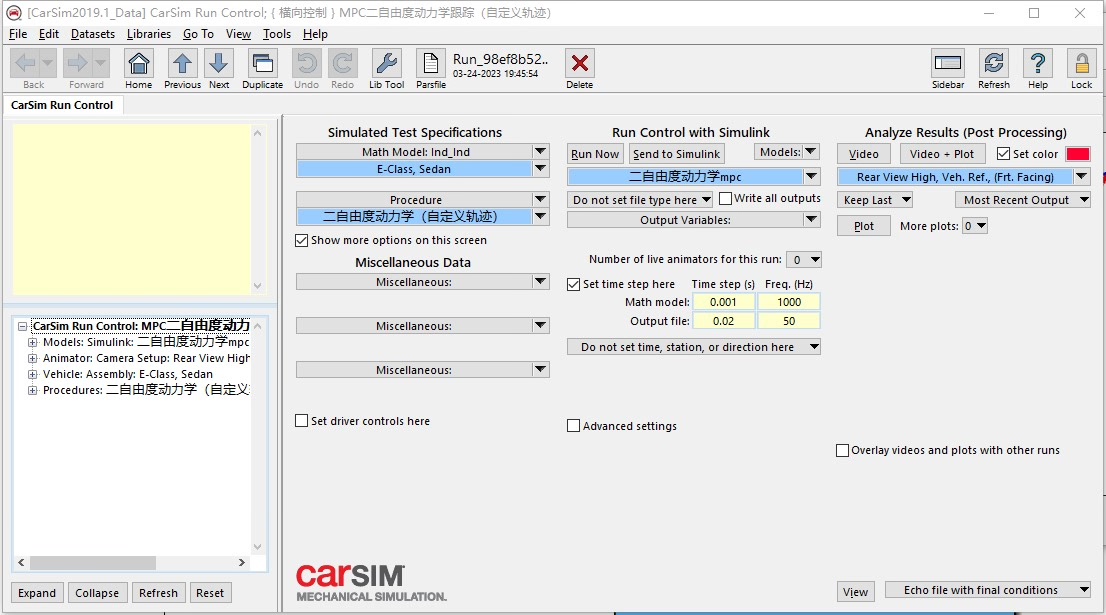
Carsim与Simulink联合仿真
Carsim 擅长高精度的车辆动力学建模,Simulink则在控制系统设计与仿真方面表现出色。二者联合,简直是天作之合。通过这种联合方式,我们能更真实地模拟车辆在实际行驶中的各种状况。
基于二自由度动力学模型的MPC
二自由度动力学模型简介
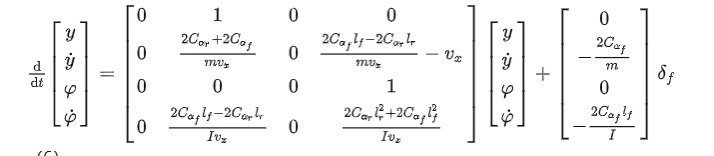
车辆的二自由度动力学模型主要考虑车辆的侧向运动和横摆运动。简单来说,它把车辆简化成一个在平面内运动的刚体,主要关注侧向力和横摆力矩对车辆运动状态的影响。以下是一个简单示意性的二自由度动力学模型的状态方程代码示例(以Python为例,实际应用可能更复杂且结合专业库):
import numpy as np
# 车辆参数
m = 1500 # 车辆质量(kg)
lf = 1.2 # 前轴到质心的距离(m)
lr = 1.5 # 后轴到质心的距离(m)
Iz = 2500 # 车辆绕z轴的转动惯量(kg·m²)
Cf = 60000 # 前轮侧偏刚度(N/rad)
Cr = 70000 # 后轮侧偏刚度(N/rad)
def two_dof_model(x, u, dt):
# x 状态变量 [y, psi, vy, r]
# y 侧向位移(m)
# psi 横摆角(rad)
# vy 侧向速度(m/s)
# r 横摆角速度(rad/s)
# u 输入变量 [delta, a]
# delta 前轮转角(rad)
# a 纵向加速度(m/s²)
y = x[0]
psi = x[1]
vy = x[2]
r = x[3]
delta = u[0]
a = u[1]
beta = np.arctan2(vy, a + 0.0001) # 质心侧偏角,避免除零
Fyf = -Cf * (delta - np.arctan2(vy + lf * r, a + 0.0001))
Fyr = -Cr * (-np.arctan2(vy - lr * r, a + 0.0001))
d_y = vy * np.cos(psi) - a * np.sin(psi)
d_psi = r
d_vy = (Fyf * np.cos(delta) + Fyr - m * a * beta) / m
d_r = (lf * Fyf * np.cos(delta) - lr * Fyr) / Iz
new_x = np.array([y + d_y * dt, psi + d_psi * dt, vy + d_vy * dt, r + d_r * dt])
return new_x
这段代码定义了一个简单的二自由度动力学模型函数twodofmodel,它接收当前状态x、输入u和时间步长dt,返回下一时刻的状态。通过这个模型,我们能预测车辆在不同输入下的运动状态。
MPC实现路径跟踪原理
MPC的核心思想是在每个采样时刻,基于当前系统状态,预测未来一段时间(预测时域)内系统的输出,并通过求解一个优化问题,得到当前时刻的最优控制输入。在路径跟踪中,我们要让车辆行驶轨迹尽可能接近参考路径。
以MPC的目标函数为例,在Python中简单表示如下:
import numpy as np
def mpc_objective(x, ref_path, Q, R):
# x 当前状态
# ref_path 参考路径
# Q 状态权重矩阵
# R 控制输入权重矩阵
cost = 0
for i in range(len(ref_path)):
y_error = x[0] - ref_path[i][0]
psi_error = x[1] - ref_path[i][1]
cost += np.dot(np.array([y_error, psi_error]), np.dot(Q, np.array([y_error, psi_error]).T))
# 假设控制输入为 [delta, a]
u = np.array([x[4], x[5]])
cost += np.dot(u, np.dot(R, u.T))
return cost
这个函数mpcobjective计算了当前状态x与参考路径refpath之间的误差代价,并且考虑了控制输入的权重。在实际应用中,我们会通过优化算法(比如二次规划)来求解使得这个目标函数最小的控制输入,从而让车辆更好地跟踪参考路径。
仿真结果可视化
在仿真结果中,蓝色的是全局参考路径,就像我们给车辆设定的远方目标。黄色表示预测时域内的参考路径,它更聚焦于车辆短期内要跟随的轨迹段。而红色的车辆行驶轨迹则展示了车辆实际跑出来的路线。理想情况下,红色轨迹应该紧紧贴着蓝色和黄色路径,这就证明了我们的MPC算法在路径跟踪上的有效性。
通过这样的二/三自由度动力学MPC方法,结合Carsim和Simulink联合仿真,我们在自动驾驶路径跟踪技术上又迈出了坚实的一步,为未来自动驾驶车辆更安全、高效地行驶奠定了基础。后续还可以进一步优化模型和算法,探索更多复杂场景下的路径跟踪应用。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 13
13 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)