opencv 表识别 工业表智能识别 数字式表盘识别,指针式表盘刻度识别,分为表检测,表盘纠正...
包括不同网格尺寸(4x4、5x5、6x6、7x7)和不同标记数量的组合。每个字典都经过优化设计,确保标记间的汉明距离最大化,减少误识别概率。
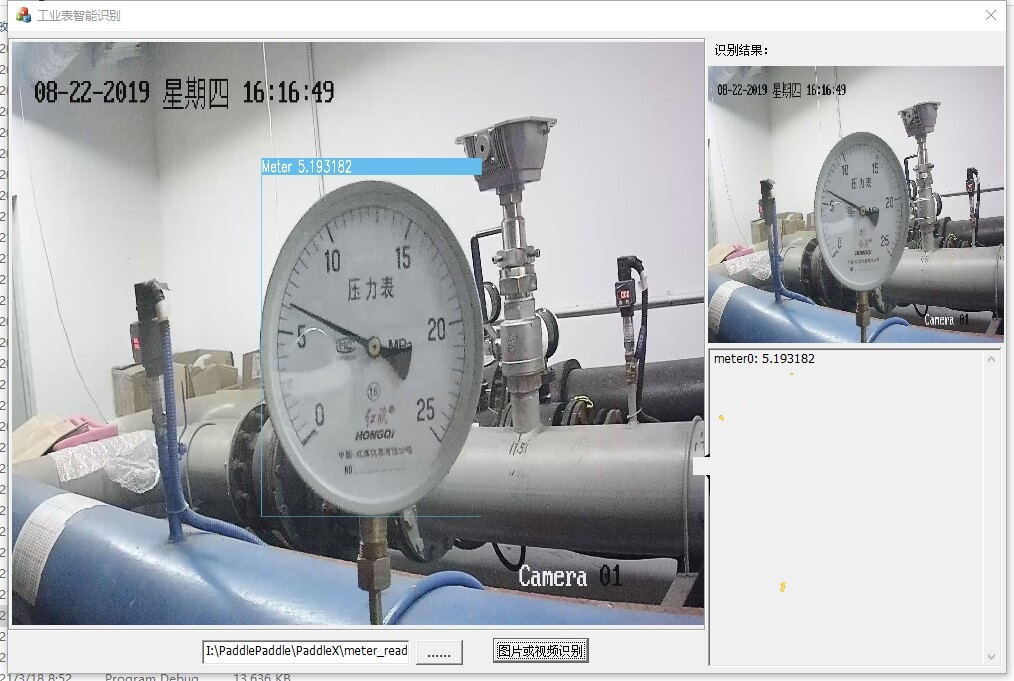
opencv 表识别 工业表智能识别 数字式表盘识别,指针式表盘刻度识别,分为表检测,表盘纠正,刻度分割,刻度拉直识别 第一,检测表盘 第二,然后,把表盘区域 ROI 出来 第三,然后,送到分割模型中 把表盘中的指针和时刻,分割出来,然后,把圆形表盘,拉直,拉成一条线,看当时时刻在 哪条线,把表盘中的指针和时刻,分割出来,分割出来的是圆形的,分割出来的,只有刻度 和指针,但是是圆形的,拉成直线,圆,变换成直线,然后,看当前指针指到哪个刻度
引言
在当代软件开发领域,配置文件的解析与计算机视觉应用已成为不可或缺的组成部分。本文将对两个重要的 C++ 库——YAML-CPP 和 OpenCV ArUco 模块进行深入的功能分析,重点探讨其架构设计、核心机制以及在实际应用中的功能表现。
YAML-CPP 库功能深度剖析
核心架构与设计理念
YAML-CPP 采用了一种分层的、面向对象的架构设计,将 YAML 文档的解析、表示和序列化过程进行了清晰的职责分离。
文档表示层是整个库的基础,通过节点(Node)系统来建模 YAML 文档结构。该系统精心设计了五种节点类型:未定义类型(Undefined)、空值类型(Null)、标量类型(Scalar)、序列类型(Sequence)和映射类型(Map)。每种类型都有其特定的数据存储和行为特征。
在内存管理方面,库实现了引用计数的智能指针机制,确保节点数据的生命周期得到妥善管理。同时,节点间的依赖关系通过专门的跟踪系统维护,保证了数据一致性。
解析引擎工作机制
YAML-CPP 的解析系统采用事件驱动的设计模式。解析器在读取 YAML 文档时,会生成一系列结构化事件,这些事件精确对应文档中的各个元素:
- 文档开始和结束事件
- 标量值发现事件
- 序列和映射的起始与终止事件
- 锚点和别名引用事件
事件处理器接口为开发者提供了处理这些事件的统一方式,使得解析过程具有高度的可定制性。这种设计允许在解析过程中进行实时数据处理,而不需要等待整个文档加载完成。
数据发射功能实现
与解析功能相对应,发射器(Emitter)系统负责将内存中的节点结构序列化为 YAML 格式文本。该系统支持多种输出风格:
- 块样式:使用缩进表示层次结构
- 流样式:使用方括号和花括号的紧凑表示
- 自定义样式:允许开发者控制具体元素的格式化方式
发射器还提供了丰富的格式控制选项,包括缩进设置、标量引用风格、序列和映射的布局控制等,确保生成的 YAML 文档既符合标准又具有良好的可读性。
类型安全与转换系统
类型转换是 YAML-CPP 的一个重要功能特性。库通过模板元编程技术实现了类型安全的数值转换机制:
- 基础数据类型转换:支持整数、浮点数、布尔值等基础类型的双向转换
- 字符串处理:自动处理字符串的编码和转义序列
- 容器类型支持:为 std::vector、std::map 等标准容器提供原生支持
- 自定义类型适配:通过模板特化允许用户自定义类型的序列化和反序列化
转换系统在运行时进行类型验证,确保数据类型的正确性,同时在编译期提供类型安全检查。
错误处理与健壮性设计
YAML-CPP 实现了全面的异常处理机制,能够捕获和处理各种解析和转换错误:
- 语法错误检测:精确报告 YAML 文档中的语法问题位置
- 类型转换异常:当数据类型不匹配时提供详细的错误信息
- 递归深度保护:防止恶意或错误格式的文档导致栈溢出
- 内存分配保护:优雅处理内存不足等系统级错误
OpenCV ArUco 模块功能深度解析
标记检测算法流程
ArUco 模块的标记检测功能采用多阶段的处理流水线,每个阶段都经过精心优化以确保检测的准确性和效率。
图像预处理阶段首先对输入图像进行自适应阈值处理。该过程使用滑动窗口技术,根据局部像素强度分布动态计算阈值,有效应对不均匀光照条件。算法支持可配置的窗口大小范围和步进参数,允许在不同应用场景下进行优化调整。
轮廓提取与筛选阶段从二值化图像中提取所有可能的轮廓候选。系统应用多种几何约束来筛选出符合标记特征的轮廓:
- 周长比例约束:排除过大或过小的轮廓
- 凸性检查:确保轮廓形状合理
- 角点数量验证:筛选出四边形或近似四边形的轮廓
- 距离阈值:避免过于接近的重复检测
位模式解码阶段对通过筛选的候选区域进行透视校正,将其转换为规范的正方形图像。然后提取内部的二进制模式,并与预定义的字典进行匹配。解码过程包含错误检测和纠正机制,能够处理部分遮挡或图像噪声的情况。
标记字典管理系统
ArUco 模块提供了完善的标记字典管理功能,支持多种预定义字典和自定义字典:
预定义字典分类包括不同网格尺寸(4x4、5x5、6x6、7x7)和不同标记数量的组合。每个字典都经过优化设计,确保标记间的汉明距离最大化,减少误识别概率。
自定义字典生成功能允许用户根据特定需求创建专用标记集。生成算法基于最大汉明距离原则,确保新生成的标记与现有标记以及彼此之间具有良好的区分度。系统支持基于现有字典的扩展生成,保持向后兼容性。
姿态估计算法实现
姿态估计是 ArUco 模块的核心功能之一,基于计算机视觉中的透视 n 点(PnP)问题解决方案。
opencv 表识别 工业表智能识别 数字式表盘识别,指针式表盘刻度识别,分为表检测,表盘纠正,刻度分割,刻度拉直识别 第一,检测表盘 第二,然后,把表盘区域 ROI 出来 第三,然后,送到分割模型中 把表盘中的指针和时刻,分割出来,然后,把圆形表盘,拉直,拉成一条线,看当时时刻在 哪条线,把表盘中的指针和时刻,分割出来,分割出来的是圆形的,分割出来的,只有刻度 和指针,但是是圆形的,拉成直线,圆,变换成直线,然后,看当前指针指到哪个刻度
单标记姿态估计使用每个标记的四个角点作为特征点,结合已知的标记物理尺寸和相机内参,计算标记相对于相机的三维位置和方向。算法输出旋转向量和平移向量,可以直接用于增强现实等应用中的虚拟物体定位。
多标记姿态估计通过标记板(Board)的概念,将多个标记组合使用,提高姿态估计的精度和稳定性。当单个标记可能被部分遮挡时,系统可以利用其他可见标记的信息来维持稳定的姿态跟踪。
ChArUco 混合标记板
ChArUco 是 ArUco 模块的一个重要扩展,将棋盘格角点的精度优势与 ArUco 标记的识别可靠性相结合:
角点插值机制利用检测到的 ArUco 标记位置,通过几何关系推断出棋盘格角点的精确位置。这种方法的角点定位精度远高于传统的角点检测算法。
标定应用特别适用于相机标定任务。ChArUco 板提供了大量高精度的角点,能够生成更准确的相机内参和畸变系数估计。
检测参数优化系统
ArUco 模块提供了丰富的检测参数配置选项,允许用户根据具体应用场景进行精细调优:
- 自适应阈值参数:控制二值化过程的敏感度
- 轮廓筛选阈值:调整标记大小的接受范围
- 角点细化方法:选择不同的角点定位精度优化策略
- 误检抑制参数:降低错误检测的概率
实际应用场景分析
YAML-CPP 的应用领域
在配置管理系统中,YAML-CPP 提供了可靠的配置文件读写能力。其类型安全特性和错误处理机制确保了配置数据的完整性。在数据序列化场景中,库支持复杂数据结构的持久化存储,便于应用程序的状态保存和恢复。此外,在跨平台数据交换应用中,YAML 格式的良好可读性使得 YAML-CPP 成为理想的数据中间件。
OpenCV ArUco 的应用实现
在增强现实领域,ArUco 模块提供了稳定的标记检测和姿态跟踪功能,为虚拟物体在真实环境中的定位和渲染奠定基础。机器人导航系统中利用 ArUco 标记作为视觉信标,实现机器人的精确定位和路径规划。工业检测应用则利用标记的高精度定位特性,进行产品质量检测和尺寸测量。
性能特征与优化建议
YAML-CPP 性能考量
解析性能方面,事件驱动的解析模式使得 YAML-CPP 能够高效处理大型文档,内存占用与文档复杂度呈线性关系。在序列化过程中,发射器的流式输出机制减少了内存缓冲需求,提高了大文档的生成效率。
优化建议包括重用解析器和发射器实例以减少对象创建开销,合理设置解析深度限制防止资源耗尽,以及在频繁访问的场景中使用节点引用避免不必要的复制操作。
ArUco 模块性能优化
检测速度方面,算法的多阶段流水线设计允许早期淘汰不合格候选,减少不必要的计算。通过参数调优可以在检测率和处理速度之间找到最佳平衡点。
内存使用方面,模块采用原地处理技术,最小化中间图像的存储需求。对于实时应用,建议使用适当的图像分辨率,在检测精度和计算负载之间取得平衡。
错误处理与可靠性设计
YAML-CPP 的健壮性保障
库实现了分层次的错误处理策略。在语法层面,解析器能够精确识别和报告 YAML 格式错误,提供详细的位置信息和错误描述。在语义层面,类型转换系统确保数据的一致性和正确性,防止无效的类型转换导致程序异常。
ArUco 模块的容错机制
检测过程中,模块采用多重验证机制确保检测结果的可靠性。每个检测阶段都设有质量检查点,淘汰不符合要求的候选。在姿态估计阶段,算法包含内部一致性检查,识别和排除异常估计结果。
集成与扩展能力
YAML-CPP 的扩展接口
库提供了完善的扩展机制,允许用户自定义数据类型的行为。通过模板特化,开发者可以为其自定义类型实现专用的序列化和反序列化逻辑, seamlessly 集成到现有的 YAML 处理流程中。
ArUco 模块的算法扩展
模块设计支持检测算法的扩展和定制。用户可以通过继承基础类并重写关键方法来实现自定义的检测逻辑。同时,参数系统的灵活性允许针对特定应用场景进行深度优化。
结论
YAML-CPP 和 OpenCV ArUco 模块分别在其专业领域内提供了强大而可靠的功能实现。YAML-CPP 通过精心的架构设计和类型安全机制,为配置文件处理和数据序列化提供了工业级的解决方案。OpenCV ArUco 模块则凭借其先进的计算机视觉算法和丰富的功能特性,在标记检测和姿态估计领域展现出卓越的性能。
这两个库的成功不仅在于其核心功能的完善实现,更在于其提供的扩展性和定制能力,使得开发者能够根据具体需求进行深度优化和功能扩展。通过深入理解其内部机制和功能特性,开发者能够更好地利用这些工具,构建出更加稳定、高效的软件系统。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 11
11 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)