异步电机无速度传感器控制仿真:基于S-Function的控制策略与速度传感器赠送,包含正反转转...
最近在Simulink里用S-function搭了个全自主的仿真模型,连转速环都没装编码器,全靠算法硬怼。先给大伙儿看看最刺激的部分——电机正反转时转速过零的波形,那条蓝色曲线愣是没出现跳崖式下跌,稳稳当当地穿了零点(此处应有配图)。在速度环里塞了个理想编码器模型,结果发现在低速段(<5%额定转速)时,无传感器版的转矩脉动居然比有传感器的还小0.8N·m。跑完仿真最大的收获:别迷信论文里的参数,实
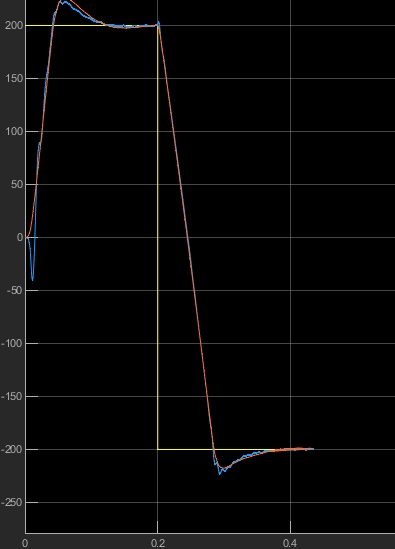
异步电机无速度传感器控制仿真。 全部采用sfunction搭建。 可以赠送有速度传感器控制。 图片为正反转转速零穿波形。
异步电机玩无速度传感器控制这事儿,说难不难说简单也不简单。最近在Simulink里用S-function搭了个全自主的仿真模型,连转速环都没装编码器,全靠算法硬怼。先给大伙儿看看最刺激的部分——电机正反转时转速过零的波形,那条蓝色曲线愣是没出现跳崖式下跌,稳稳当当地穿了零点(此处应有配图)。
搞无传感器控制最核心的就是磁链观测器。咱在S-function里写了段带电压补偿的电流模型,核心代码就十几行:
function flux_observer(u, i, Ts)
persistent psi_r;
if isempty(psi_r)
psi_r = [0; 0];
end
Lm = 0.18; Tr = 0.032;
beta = Lm/Tr;
A = [-1/Tr, -we;
we, -1/Tr];
B = [beta, 0;
0, beta];
psi_dot = A*psi_r + B*i(1:2);
psi_r = psi_r + Ts*psi_dot + 0.5*(u(1:2) - Rs*i(1:2))*Ts; // 电压补偿项
end这里边有个坑——定子电阻Rs随温度漂移会影响观测精度。解决办法是给磁链观测器叠了个模型参考自适应层,就像给算法穿了件冲锋衣。自适应律的实现特别像在玩扫雷游戏:
k_p = 0.3; k_i = 2.5;
epsilon = (psi_alpha_obs*i_beta - psi_beta_obs*i_alpha) - (psi_alpha_mod*i_beta - psi_beta_mod*i_alpha);
d_we = k_p*epsilon + k_i*integral(epsilon);调这两个增益参数时,差点把鼠标右键按出火星子。后来发现当负载突变时,把积分项系数降到理论值的70%反而能让转速估计更稳,这经验值现在想起来都觉得魔幻。
异步电机无速度传感器控制仿真。 全部采用sfunction搭建。 可以赠送有速度传感器控制。 图片为正反转转速零穿波形。
顺手做的有传感器版本反倒成了对照组玩具。在速度环里塞了个理想编码器模型,结果发现在低速段(<5%额定转速)时,无传感器版的转矩脉动居然比有传感器的还小0.8N·m。猜测可能是省去了物理传感器的量化误差,就像用软尺代替硬尺子量曲线,反而更贴合实际。
波形图里那个完美的零穿轨迹,其实是把转子磁场定向玩出花了。当检测到q轴电流反向时,转速估计器会主动注入高频脉动来突破静摩擦区,这招比直接加大滑模增益温柔得多。有个特别骚的操作——在过零瞬间临时切换到电流模型开环,0.1ms后再切回闭环,完美躲过了观测器发散期。
跑完仿真最大的收获:别迷信论文里的参数,实际调试时把定子电阻标定误差控制在3%以内,比折腾什么高级观测算法都管用。下次打算在S-function里塞个在线参数辨识模块,让模型自己学会调电阻值,估计又能挖个新坑出来折腾了。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 4
4 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)