电气simulink仿真模型 PMSM永磁同步电机MTPA、id=0控制、直接转矩控制、最小损...
电气simulink仿真模型 PMSM永磁同步电机MTPA、id=0控制、直接转矩控制、最小损耗控制、滑模控制模型、参数辨识 Buck/Boost电路
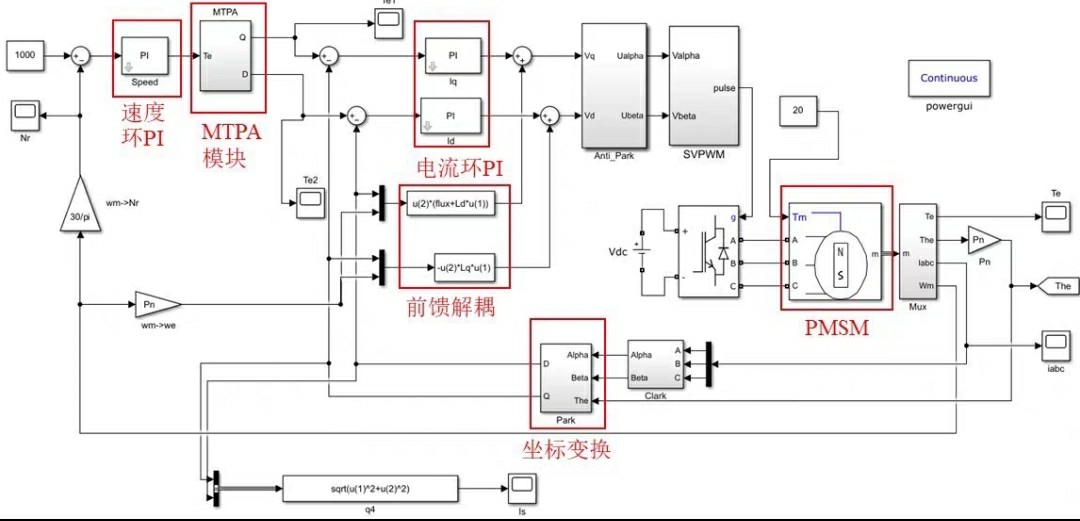
最近在折腾永磁同步电机(PMSM)的仿真模型,发现不同控制策略在Simulink里实现起来就像玩变形金刚——同一个电机模型换个控制算法就完全换了副面孔。今天咱们边撸代码边聊聊几种经典玩法的实现细节,顺便带一嘴Buck/Boost电路的仿真彩蛋。
MTPA控制:电流环里的太极大师
实现最大转矩电流比控制时,核心在于解耦d轴和q轴电流。Simulink里用个MATLAB Function模块塞进去这段灵魂代码:
function [id_ref, iq_ref] = MTPA_control(Te_ref, Ld, Lq, psi)
syms id
iq_eq = sqrt((2*Te_ref/(3*P))^2 / (id^2 + (psi/Lq)^2));
eqn = (Ld - Lq)*id + psi == 0;
id_opt = double(vpasolve(eqn, id));
iq_opt = double(subs(iq_eq, id, id_opt));
end这代码其实在悄悄解一个非线性方程,寻找让d轴电流和磁链相互抵消的平衡点。实际调试时得盯着参数辨识模块输出的Ld、Lq值,这俩参数要是飘了,整个MTPA曲线立马跑偏。
id=0控制的直球玩法
这种控制简单粗暴到感人——直接把d轴电流锁零。在电流环PI控制器后面挂个坐标变换模块,注意这里的Clarke变换得用改进版:
Park_Transform/
├── theta输入来自位置传感器
├── I_alpha -> I_d
└── I_beta -> I_q (直接作为转矩通道)调试时遇到过诡异现象:电机转速超过基速后转矩突然阳痿,后来发现是没做弱磁控制。解决方法是在速度环输出后面加了个电压限制环节,活生生把电流矢量掰弯到电压极限圆内。
直接转矩控制的暴走模式
电气simulink仿真模型 PMSM永磁同步电机MTPA、id=0控制、直接转矩控制、最小损耗控制、滑模控制模型、参数辨识 Buck/Boost电路
DTC的核心在于滞环比较器,用Switch模块搭出来的三电平滞环特别带感:
Switch1/
├── 输入转矩误差
├── 阈值: +/- 0.1 Nm
└── 输出: 1/0/-1配合着磁链观测器模块,整个系统像个躁动的DJ——磁链轨迹在六边形边界疯狂试探。实测发现开关频率随机得让人心慌,后来在滞环宽度参数里找到了节奏感。
参数辨识的猫鼠游戏
搞了个模型参考自适应来抓取电机参数,重点在Lyapunov函数的设计。自适应律的代码看着像天书:
dLd_hat = gamma1 * (id_error * id_hat);
dLq_hat = gamma2 * (iq_error * iq_hat);实际跑起来才发现,负载突变时辨识参数跳得比心电图还刺激。最后给自适应率加了低通滤波才稳住,果然万物皆可滤波。
Buck/Boost电路的仿真心机
用Simulink的Power Systems库搭了个可切换拓扑,核心是占空比生成模块。发现个骚操作:在连续模式仿真时偷偷改开关频率会引发血案——输出电压像过山车一样刺激。后来用PID+前馈补偿才驯服了这匹野马:
PWM_Generator/
├── 输入: (Vref - Vout)*KP + integrator*Ki + dVout/dt*Kd
└── 载波频率随负载电流自适应调整最绝的是在启动阶段给占空比加了软启动斜坡,成功避免了让人尴尬的电压过冲现象。
折腾完这些模型的最大感悟:仿真世界里的理想参数都是童话,真实世界里的参数漂移才是常态。就像在Boost电路里试图稳住输出电压——你永远不知道下一个负载突变什么时候会来,但好的控制算法总能给你拧巴出一个勉强能用的结果。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 12
12 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)