LoRaWAN工业温控器实战:从代码到量产的那些事儿
lorawan 工业温控器量产版源代码 stm32l073+sx1278 支持iap固件升级 温度采集,湿度采集 两路继电器控制 1路外部5v模拟输入 1路加热板工况状态监测 lorawan网关后台远程控制,周期上报

最近在折腾一款基于STM32L073和SX1278的LoRaWAN工业温控器,支持IAP固件升级、温湿度采集、继电器控制,还能远程操控。今天简单聊聊量产版代码设计里几个有意思的点,顺带贴点关键代码。
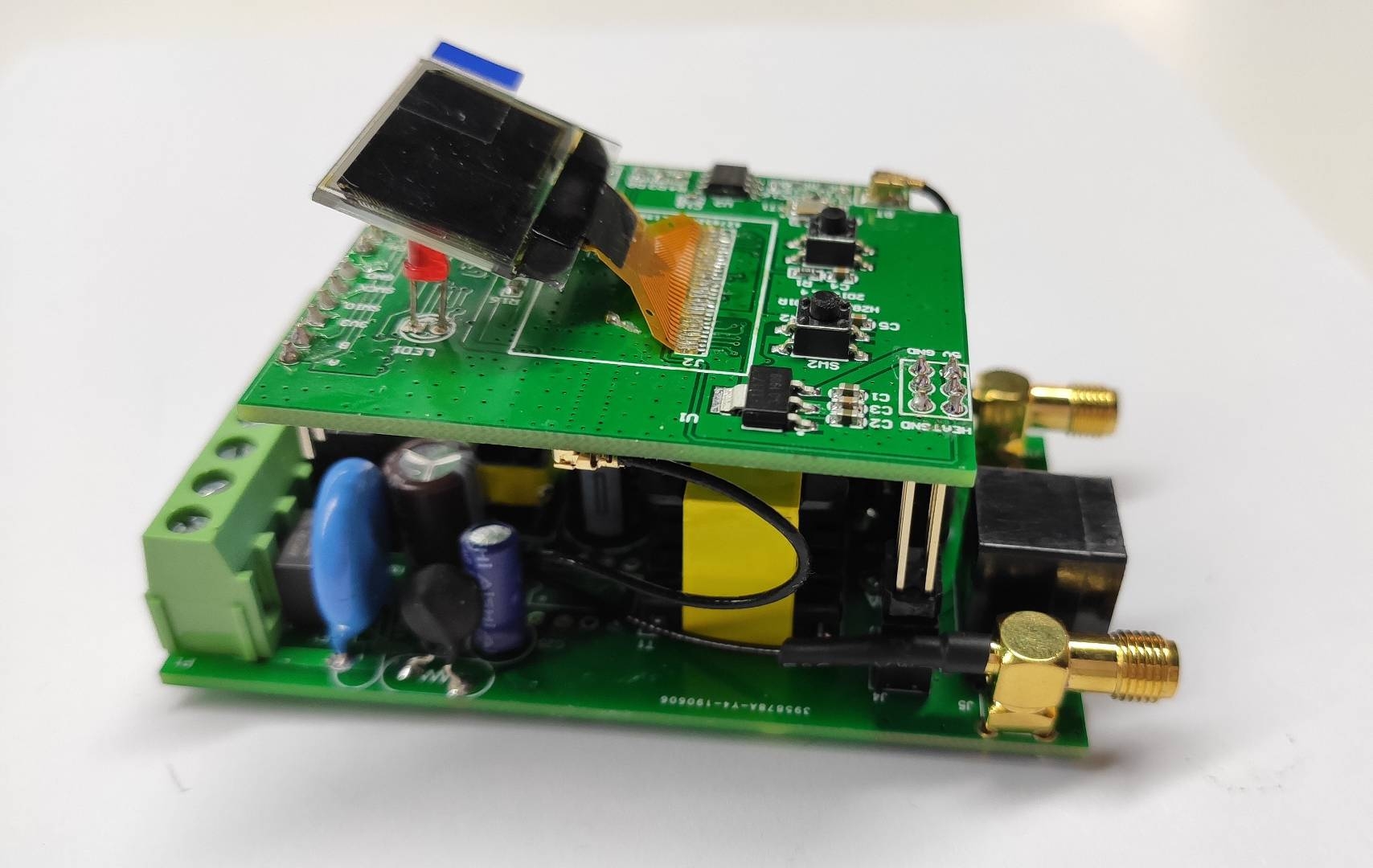
硬件架构与基础配置
主控是STM32L073,低功耗+LoRa模组SX1278的经典组合。底层驱动直接用HAL库,但针对低功耗做了优化。比如SX1278的SPI初始化,需要关中断防止时序被打断:
void SX1278_SPI_Init() {
__HAL_SPI_DISABLE(&hspi1); // 先停掉SPI
hspi1.Instance->CR1 = SPI_BAUDRATEPRESCALER_8 | SPI_DIRECTION_2LINES
| SPI_POLARITY_LOW | SPI_PHASE_1EDGE;
__HAL_SPI_ENABLE(&hspi1); // 重新使能
}这里手动配置SPI的寄存器而不是全用HAL,主要是为了减少函数调用层级,降低功耗。
IAP升级实战:空中更新固件
工业场景下,远程升级是刚需。我们的IAP方案把Flash分为Bootloader区(0x08000000-0x08003FFF)和APP区。升级流程:
- 网关下发加密固件包;
- 设备接收后写入外部Flash缓存;
- 校验通过后跳转Bootloader搬运代码。
关键代码是跳转函数:
void JumpToBootloader() {
void (*SysMemBootJump)(void) = (void (*)(void))(*((uint32_t*)0x1FF00004));
__disable_irq(); // 关中断
HAL_RCC_DeInit();
HAL_DeInit();
SysTick->CTRL = 0;
SysTick->LOAD = 0;
SysTick->VAL = 0;
__set_MSP(*(__IO uint32_t*)0x08000000); // 重置栈指针
SysMemBootJump();
}坑点:跳转前必须彻底复位外设,否则可能因残留状态导致Bootloader异常。
温湿度采集与滤波
传感器用的是SHT30,I2C通信。但工业环境干扰大,采集数据要做滑动平均滤波:
#define FILTER_LEN 5
static float temp_history[FILTER_LEN] = {0};
float GetFilteredTemp() {
// 采集新数据并插入数组
for(int i=FILTER_LEN-1; i>0; i--){
temp_history[i] = temp_history[i-1];
}
temp_history[0] = SHT30_ReadTemp();
// 计算平均值
float sum = 0;
for(int i=0; i<FILTER_LEN; i++){
sum += temp_history[i];
}
return sum / FILTER_LEN;
}注意:滤波长度不宜过长,否则响应延迟会影响控温精度,实测5次平均效果最佳。
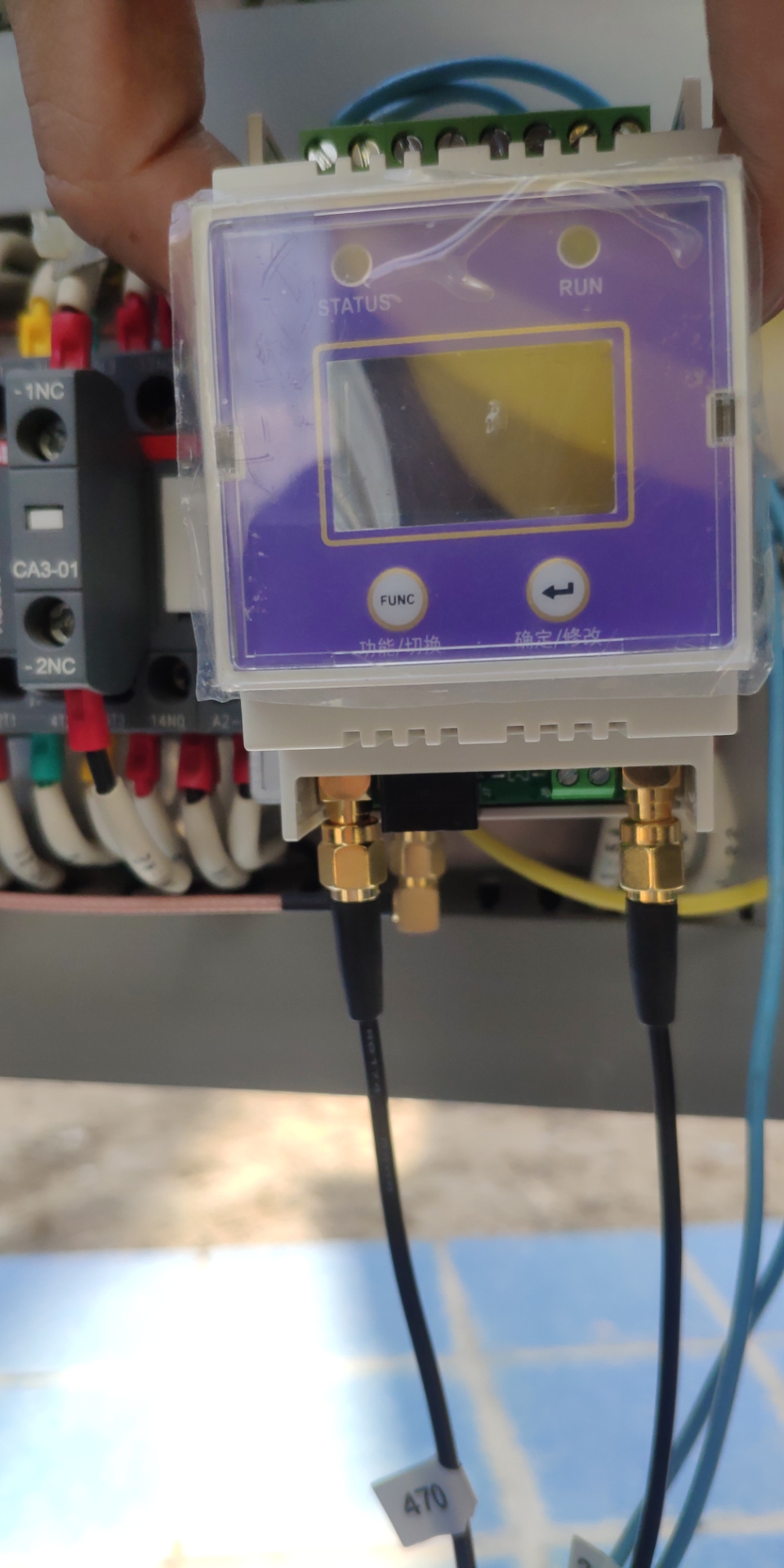
控制与监测:继电器与工况检测
两路继电器控制加热/制冷设备,代码简单但硬件有讲究:
void Relay_SetState(int ch, bool state) {
if(ch == 1) HAL_GPIO_WritePin(RELAY1_GPIO_Port, RELAY1_Pin, state?GPIO_PIN_SET:GPIO_PIN_RESET);
else if(ch == 2) HAL_GPIO_WritePin(RELAY2_GPIO_Port, RELAY2_Pin, state?GPIO_PIN_SET:GPIO_PIN_RESET);
// 添加状态回读校验
if(Relay_GetState(ch) != state) {
Error_Handler(); // 硬件异常处理
}
}硬件坑:继电器线圈必须加反向二极管吸收反电动势,否则MCU的GPIO容易烧!
LoRaWAN通信:周期上报与远程控制
使用Class A模式,每10分钟上报一次数据。重点在Payload编码优化:
uint8_t EncodePayload(float temp, float humidity) {
uint8_t buf[6];
int16_t temp_int = (int16_t)(temp * 10); // 精度0.1℃
uint16_t humidity_int = (uint16_t)(humidity * 10);
memcpy(buf, &temp_int, 2);
memcpy(buf+2, &humidity_int, 2);
// 附加模拟输入和工况状态
buf[4] = ReadAnalogInput();
buf[5] = GetHeaterStatus();
return buf;
}网关下发指令时,通过FPort区分控制类型(如FPort=1控制继电器,FPort=2设置上报间隔)。
结语
这套系统已经在几个工厂跑了大半年,稳定性达标。代码层面最大的教训是:低功耗和实时性需要精细平衡。比如温控逻辑中,如果为了省电频繁进入Stop模式,可能导致继电器动作延迟。最终方案是动态调整采集频率——温度越接近设定阈值,采集越频繁。


腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 15
15 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)