Mujoco 仿真棋格盘标定相机内参方法(附代码)
·
视频讲解:https://www.bilibili.com/video/BV1eVNMz5Eku/?vd_source=5ba34935b7845cd15c65ef62c64ba82f
代码仓库:https://github.com/LitchiCheng/mujoco-learning
前面介绍过如何获取相机图片以及apriltag的识别,那么针对apriltag进行位置的获取作为应用,在这之前我们需要考虑相机标定,一般相机分为内参标定和外参标定。没有标定的相机对于位置的提取、识别等的计算都会带来极大的误差,所以标定是必须项。
内参则是相机的光学中心c、焦距f,像素倾斜系数s,畸变系数,一些成品相机厂家都提供了较为准确的值一般形式为3x3的矩阵进行表达
畸变系数(像一些鱼眼相机之类,畸变较严重,中心点和边缘差别很大)
详细的介绍可以看 「链接」 接下来我们将介绍利用 opencv 的标定方法标定mujoco的相机,本质mujoco相机是一个理想相机,其内参可以通过fov进行直接计算,但不妨碍进行对比
这里简化相机为固定实现,使用fixed_camera,可以提前在xml中定义,如下
<camera name="rgb_camera" pos="0.5 0 0.6" euler="0 0 0" fovy="60"/>获取相机图片的方法通过封装,如下一行即可得到cv需要的bgr格式
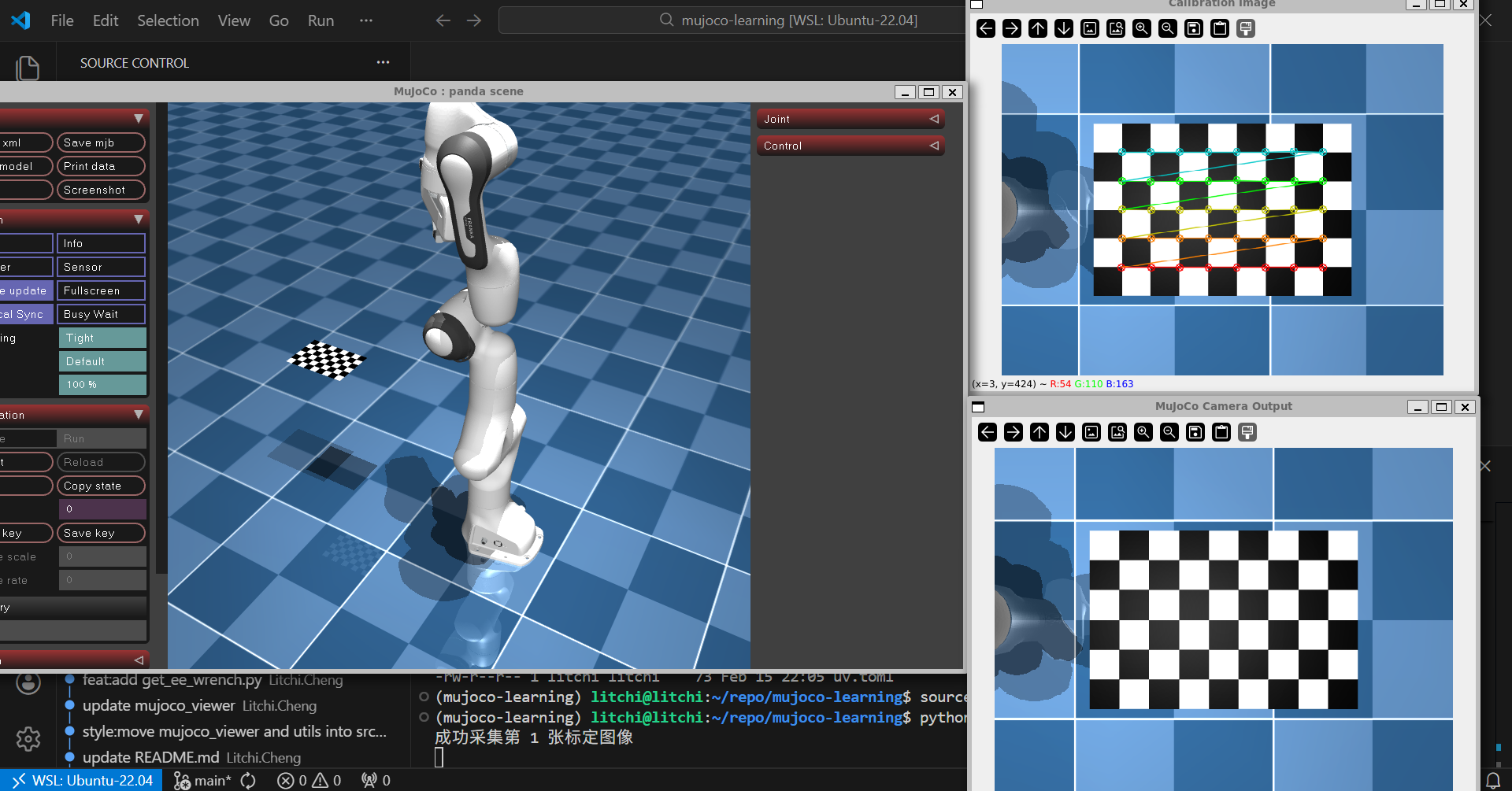
image = self.getFixedCameraImage(fix_elevation=-90, show=True)相机标定方法需要在视野下对于棋盘格checkboard进行前后左右上下以及姿态的旋转,这里可以用两种方式,一个是拖拽,另一个是mocap(前面有视频分享过)然后通过键盘进行控制
if key_states[keyboard.Key.up]:
self.checker_board_z += 0.01
if key_states[keyboard.Key.down]:
self.checker_board_z -= 0.01
if key_states[keyboard.Key.left]:
self.checker_board_x -= 0.01
if key_states[keyboard.Key.right]:
self.checker_board_x += 0.01
if key_states[keyboard.Key.page_up]:
self.checker_board_y += 0.01
if key_states[keyboard.Key.page_down]:
self.checker_board_y -= 0.01
self.setMocapPosition("calib_checkerboard", [self.checker_board_x, self.checker_board_y, self.checker_board_z])通过空格进行采集图片识别保存数据,使用cv的方法
def collect_calib_image(self, image: np.ndarray) -> bool:
gray = cv2.cvtColor(image, cv2.COLOR_RGB2GRAY)
gray = cv2.GaussianBlur(gray, (3, 3), 0) # 去抗锯齿噪声
gray = cv2.Canny(gray, 50, 150) # 提取边缘,强化角点
# 查找棋盘格角点
ret, corners = cv2.findChessboardCorners(
gray, CALIB_BOARD_SIZE,
# 允许更快检测,接受边缘模糊的角点
cv2.CALIB_CB_ADAPTIVE_THRESH
+ cv2.CALIB_CB_NORMALIZE_IMAGE
+ cv2.CALIB_CB_FAST_CHECK # 没有角点直接返回,提升速度
)
if ret:
# 降低精度要求,加快速度
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 20, 0.01)
corners2 = cv2.cornerSubPix(gray, corners, (5, 5), (-1, -1), criteria)
self.calib_object_points.append(objp)
self.calib_image_points.append(corners2)
self.calib_images.append(image)
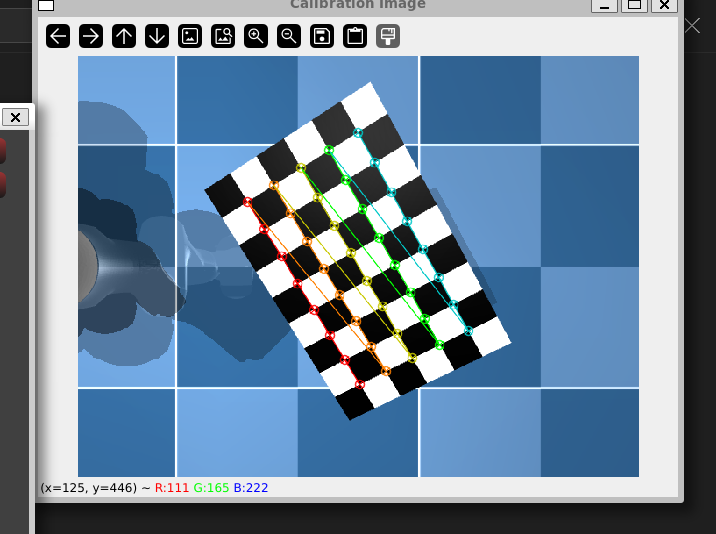
img_with_corners = cv2.drawChessboardCorners(image.copy(), CALIB_BOARD_SIZE, corners2, ret)
cv2.imshow('Calibration Image', img_with_corners)
cv2.waitKey(300)
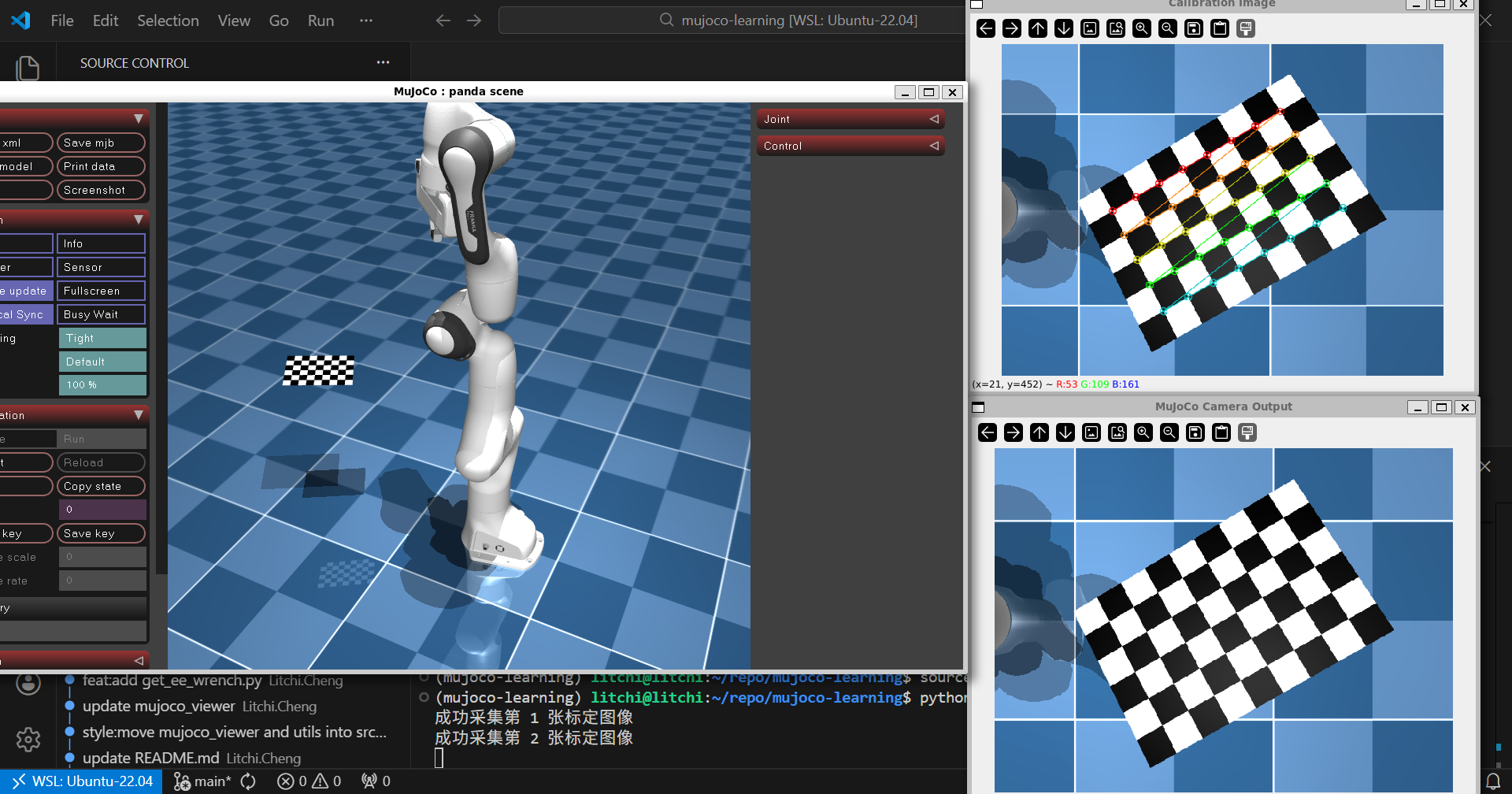
print(f"成功采集第 {len(self.calib_images)} 张标定图像")
return True
else:
# 调试:显示当前灰度图
cv2.imshow('Calibration Image', gray)
cv2.waitKey(100)
print("未检测到角点,请调整棋盘格位置/视角")
return False收集的图片越多越好,这里设定大于5张,回车进行内参计算
def calibrate_camera(self) -> Tuple[np.ndarray, np.ndarray]:
if len(self.calib_images) < 5:
print(f"标定图像数量不足(当前{len(self.calib_images)}张,建议至少5张)")
return None, None
print("\n开始相机标定...")
gray = cv2.cvtColor(self.calib_images[0], cv2.COLOR_RGB2GRAY)
h, w = gray.shape[:2]
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(
self.calib_object_points,
self.calib_image_points,
(w, h),
None,
None
)
if ret:
new_mtx, roi = cv2.getOptimalNewCameraMatrix(mtx, dist, (w, h), 1, (w, h))
# 计算重投影误差
total_error = 0
for i in range(len(self.calib_object_points)):
img_points2, _ = cv2.projectPoints(
self.calib_object_points[i], rvecs[i], tvecs[i], mtx, dist
)
error = cv2.norm(self.calib_image_points[i], img_points2, cv2.NORM_L2) / len(img_points2)
total_error += error
mean_error = total_error / len(self.calib_object_points)
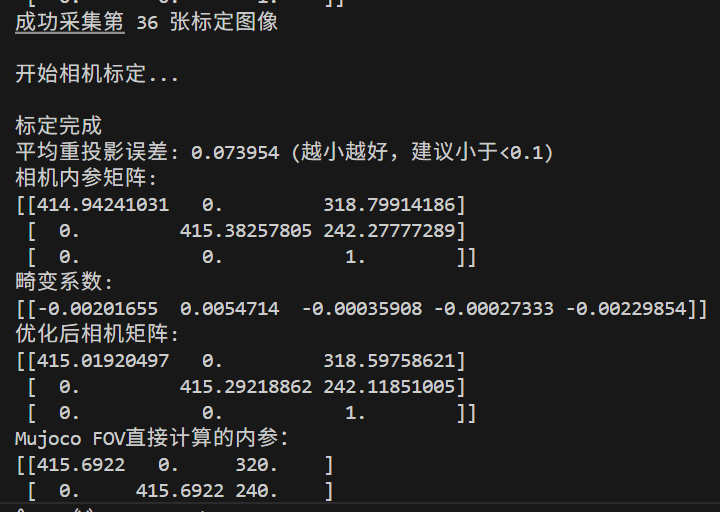
print("\n标定完成")
print(f"平均重投影误差: {mean_error:.6f} (越小越好,建议小于<0.1)")
print(f"相机内参矩阵:\n{mtx}")
print(f"畸变系数:\n{dist}")
print(f"优化后相机矩阵:\n{new_mtx}")
self.camera_matrix = new_mtx
self.dist_coeffs = dist
self.calib_done = True
return new_mtx, dist
else:
print("标定失败")
return None, None其中我们可以和直接用fov计算的对比
camera_id = mujoco.mj_name2id(self.model, mujoco.mjtObj.mjOBJ_CAMERA, "rgb_camera")
fovy = self.model.cam_fovy[camera_id]
width = 640
height = 480
f = 0.5 * height / math.tan(fovy * math.pi / 360)
CAMERA_MATRIX = np.array([
[f, 0, width / 2],
[0, f, height / 2],
[0, 0, 1]
], dtype=np.float32)
DIST_COEFFS = np.zeros(5, dtype=np.float32) # 虚拟相机无畸变
print("Mujoco FOV直接计算的内参:")
print(CAMERA_MATRIX)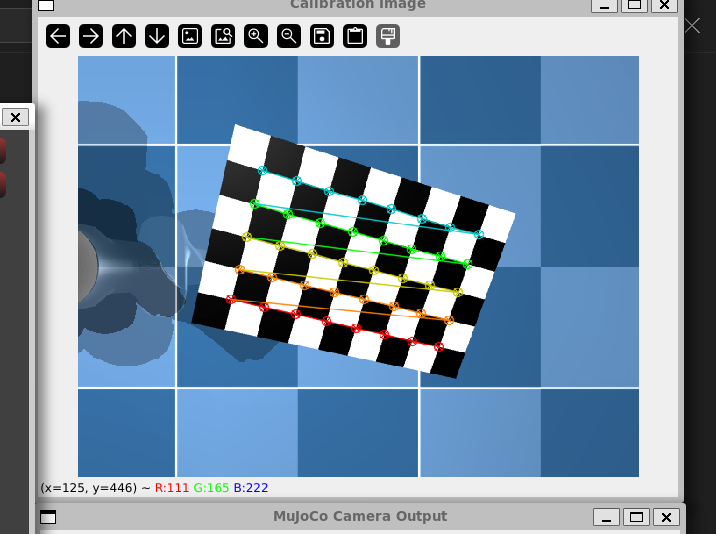
标定和直接计算的结果对比

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 5
5 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)