蚁群算法优化PID控制:探索智能控制的新高度
PID控制器由比例(P)、积分(I)、微分(D)三个环节组成,其控制规律为:\[u(t)=Kp e(t)+Ki \int其中,\(u(t)\) 是控制器的输出,\(e(t)\) 是系统的误差(设定值与实际值之差),\(Kp\) 是比例系数,\(Ki\) 是积分系数,\(Kd\) 是微分系数。这三个参数 \(Kp\)、\(Ki\)、\(Kd\) 的取值,直接影响着控制系统的性能,如图1展示了这三个关
蚁群算法优化pid,图1是pid参数,图2是适应度函数变化(ITAE),图三是最终的跟踪性能。
在自动控制领域,PID控制算法可谓是基石般的存在。它简单有效,广泛应用于各种控制系统中。然而,传统PID控制在面对复杂、时变的系统时,参数整定往往成为一个棘手的问题。这时,智能优化算法便派上了用场,今天咱们就来聊聊蚁群算法如何优化PID。
PID参数简介
PID控制器由比例(P)、积分(I)、微分(D)三个环节组成,其控制规律为:
\[u(t)=Kp e(t)+Ki \int{0}^{t}e(\tau)d\tau + Kd \frac{de(t)}{dt}\]
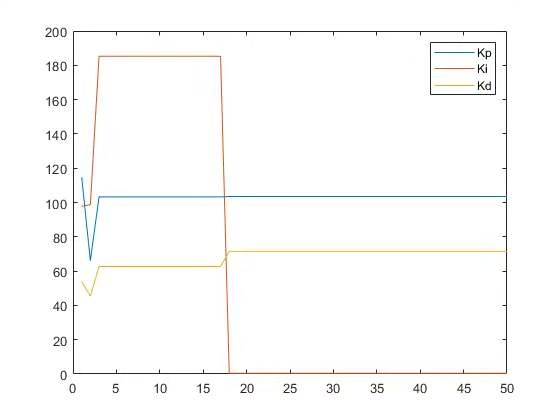
其中,\(u(t)\) 是控制器的输出,\(e(t)\) 是系统的误差(设定值与实际值之差),\(Kp\) 是比例系数,\(Ki\) 是积分系数,\(Kd\) 是微分系数。这三个参数 \(Kp\)、\(Ki\)、\(Kd\) 的取值,直接影响着控制系统的性能,如图1展示了这三个关键参数。合适的参数可以让系统快速响应、稳定运行且具有较小的稳态误差。但确定这些参数却并非易事,传统方法如Ziegler - Nichols法等,在复杂系统中效果往往不尽人意。
蚁群算法优化的思路
蚁群算法模拟了自然界蚂蚁觅食的行为。蚂蚁在寻找食物的过程中,会在路径上留下信息素,信息素浓度高的路径更容易被后续蚂蚁选择。基于此,我们可以将PID的三个参数 \(Kp\)、\(Ki\)、\(K_d\) 看作是蚂蚁要寻找的“最优路径”。
在代码实现中,首先要初始化蚁群算法的一些参数,比如蚂蚁数量、信息素挥发因子、信息素启发因子等。
# 初始化蚁群算法参数
num_ants = 50 # 蚂蚁数量
alpha = 1.0 # 信息素启发因子
beta = 2.0 # 期望启发因子
rho = 0.5 # 信息素挥发因子
Q = 100 # 信息素强度每只蚂蚁会在参数空间中随机生成一组 \(Kp\)、\(Ki\)、\(K_d\) 值,然后根据这些参数值去计算PID控制器在系统中的控制效果。而衡量这个控制效果的,就是适应度函数。
适应度函数(ITAE)
我们选用ITAE(时间与绝对误差积分)作为适应度函数,其表达式为:
蚁群算法优化pid,图1是pid参数,图2是适应度函数变化(ITAE),图三是最终的跟踪性能。
\[ITAE = \int{0}^{tf}t|e(t)|dt\]
\(t_f\) 是仿真结束时间。这个函数综合考虑了误差的大小以及误差存在的时间,值越小说明控制效果越好。在代码中,我们可以这样计算:
import numpy as np
def calculate_itae(error, time):
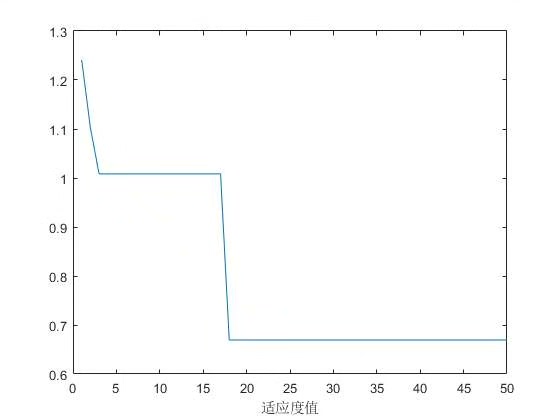
return np.trapz(time * np.abs(error), time)图2展示了在蚁群算法迭代过程中,适应度函数(ITAE)的变化情况。随着迭代次数的增加,ITAE值逐渐减小,意味着蚁群算法在不断寻找更优的PID参数组合。
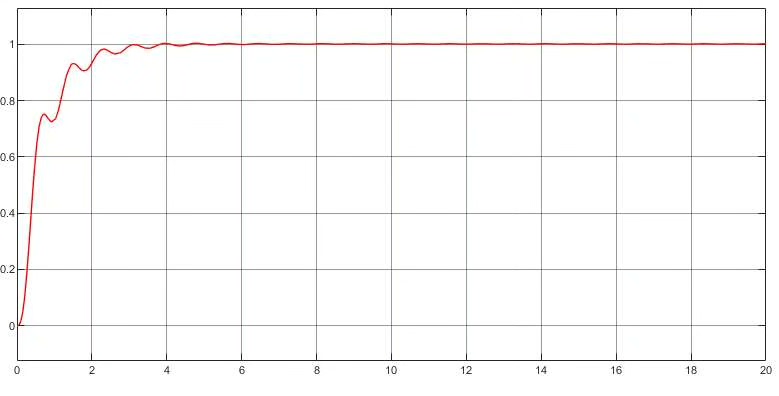
最终的跟踪性能
当蚁群算法经过一定次数的迭代,收敛到一组最优的 \(Kp\)、\(Ki\)、\(K_d\) 参数后,我们将这组参数应用到PID控制器中,来观察系统的跟踪性能,这就是图3所呈现的内容。
以下是一个简单的基于蚁群算法优化PID的控制系统仿真代码框架:
import matplotlib.pyplot as plt
import control
# 定义被控对象传递函数
num = [1]
den = [1, 1, 0]
sys = control.TransferFunction(num, den)
# 蚁群算法优化PID过程(简化示意,实际需更多逻辑)
# 省略具体迭代寻找最优参数过程,假设已得到最优参数
kp_opt = 1.5
ki_opt = 2.0
kd_opt = 0.5
# 构建PID控制器传递函数
kp = kp_opt
ki = ki_opt
kd = kd_opt
num_pid = [kd, kp, ki]
den_pid = [1, 0]
pid = control.TransferFunction(num_pid, den_pid)
# 闭环系统
closed_loop = control.feedback(pid * sys, 1)
# 仿真
t, y = control.step_response(closed_loop)
# 绘图展示跟踪性能
plt.plot(t, y)
plt.xlabel('Time (seconds)')
plt.ylabel('Response')
plt.title('Final Tracking Performance of ACO - Optimized PID')
plt.grid(True)
plt.show()从图3中可以清晰看到,经过蚁群算法优化后的PID控制器,使得系统能够快速且准确地跟踪设定值,具有良好的动态性能和稳态性能。
通过蚁群算法对PID的优化,我们为复杂系统的控制提供了一种更为智能、高效的解决方案,极大地拓展了PID控制在实际应用中的潜力。
以上就是关于蚁群算法优化PID的一些探讨,希望能给各位在控制领域探索的朋友一些启发。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 2
2 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)