技术学习新篇章:C#海康VM算法模板程序样例及Labview通用视觉框架源码介绍
C#海康VM算法模板程序样例Labview通用视觉框架源码包含与各类PLC通讯的子函数,【注意:每个VM算法样例有视频讲解!】适合从零基础到高级的一整套学习源码加资料!

海康VM的算法模板在工业视觉开发中一直挺难啃的,特别是新手看着SDK文档发懵的时候。我最近倒腾他们的C#模板程序发现个有意思的配置方式——通过XML动态加载算法参数。比如这个图像二值化的阈值设置,代码里直接调用了他们的HkAlgorithm类:
var thresholdAlgo = new HkAlgorithm("ThresholdProc");
thresholdAlgo.SetParam("GrayThreshold", 128);
thresholdAlgo.Execute(ref imageData);这里有个坑要注意,SetParam的第二个参数其实是个object类型。你要是传了个int进去,运行时会直接崩掉。正确姿势是强制类型转换,像这样:
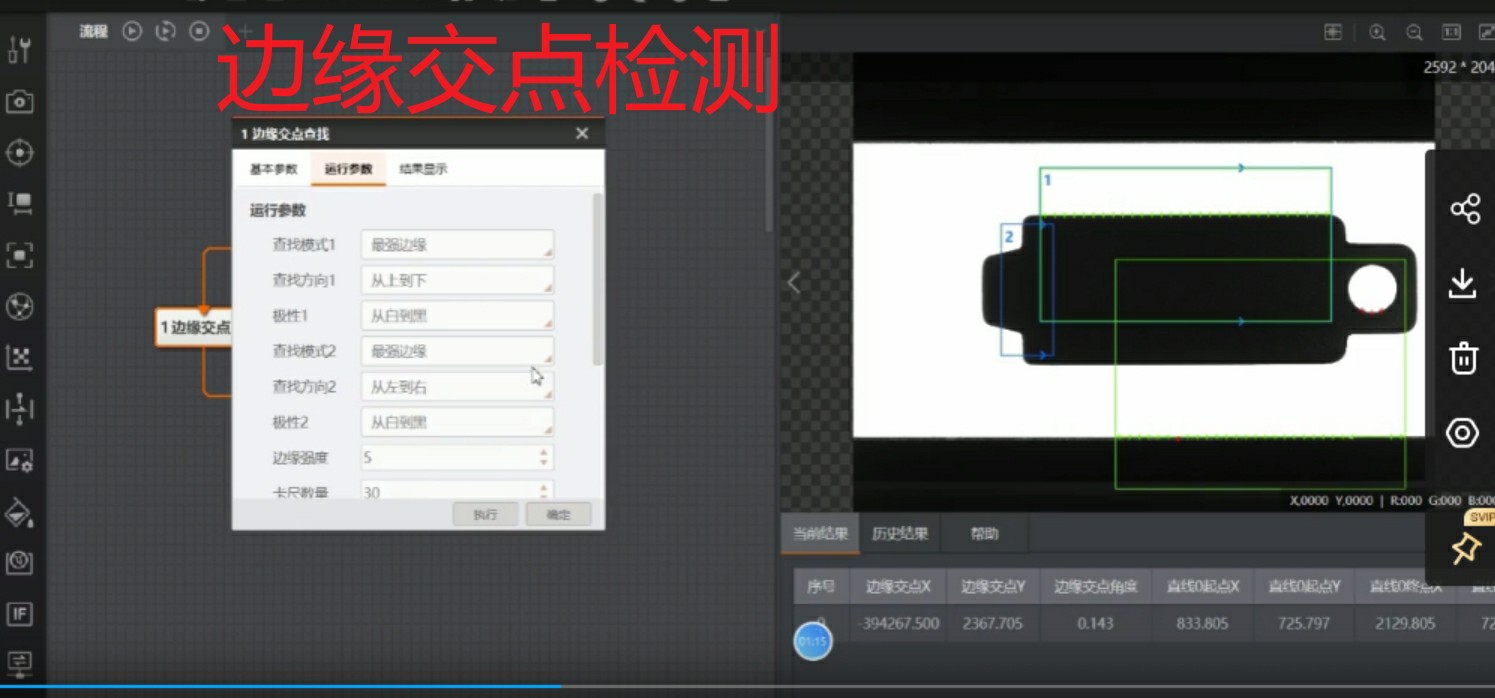
thresholdAlgo.SetParam("GrayThreshold", (byte)128);视频教程里那个定位模板匹配的案例更实用。他们用RegionOfInterest类做搜索区域限制的时候,坐标系转换很容易翻车。看这段坐标映射代码:
var basePoint = visionJob.TransformCoord(cameraX, cameraY, CoordType.CameraToWorld);
plc.SendCommand($"MOVJ P[{basePoint.X:F2},{basePoint.Y:F2}]");特别是当机械手坐标系和相机坐标系存在旋转夹角时,得先做旋转矩阵换算再发指令给PLC,不然抓取位置绝对偏移。有个学员在视频弹幕里吐槽说"明明标定好了还是歪",八成就是栽在这个点上了。
说到PLC通讯,项目里封装的OmronFins协议处理类确实省事。比如读取D寄存器的代码:
var fins = new OmronFinsCommunicator("192.168.1.10", 9600);
short currentValue = fins.ReadDM(210);
if(currentValue > threshold)
{
visionJob.TriggerAlarm(AlarmCode.Overflow);
}但要注意他们的超时机制默认是3秒,在高速流水线上得改成500ms才跟得上节拍。底层用的是Socket原生通信,抓包看过数据帧,格式倒是标准的Fins/TCP。

Labview那边有个视觉框架源码特别适合快速搭方案。它的状态机架构把图像采集、处理、结果判断分成不同Case,新手别乱改执行顺序。有个叫"视觉结果队列"的移位寄存器设计得很妙,能防止多线程处理时的资源竞争。不过他们的错误处理簇有点反人类,得按这个结构展开:
Cluster:
ErrorCode (I32)
IsError (Bool)
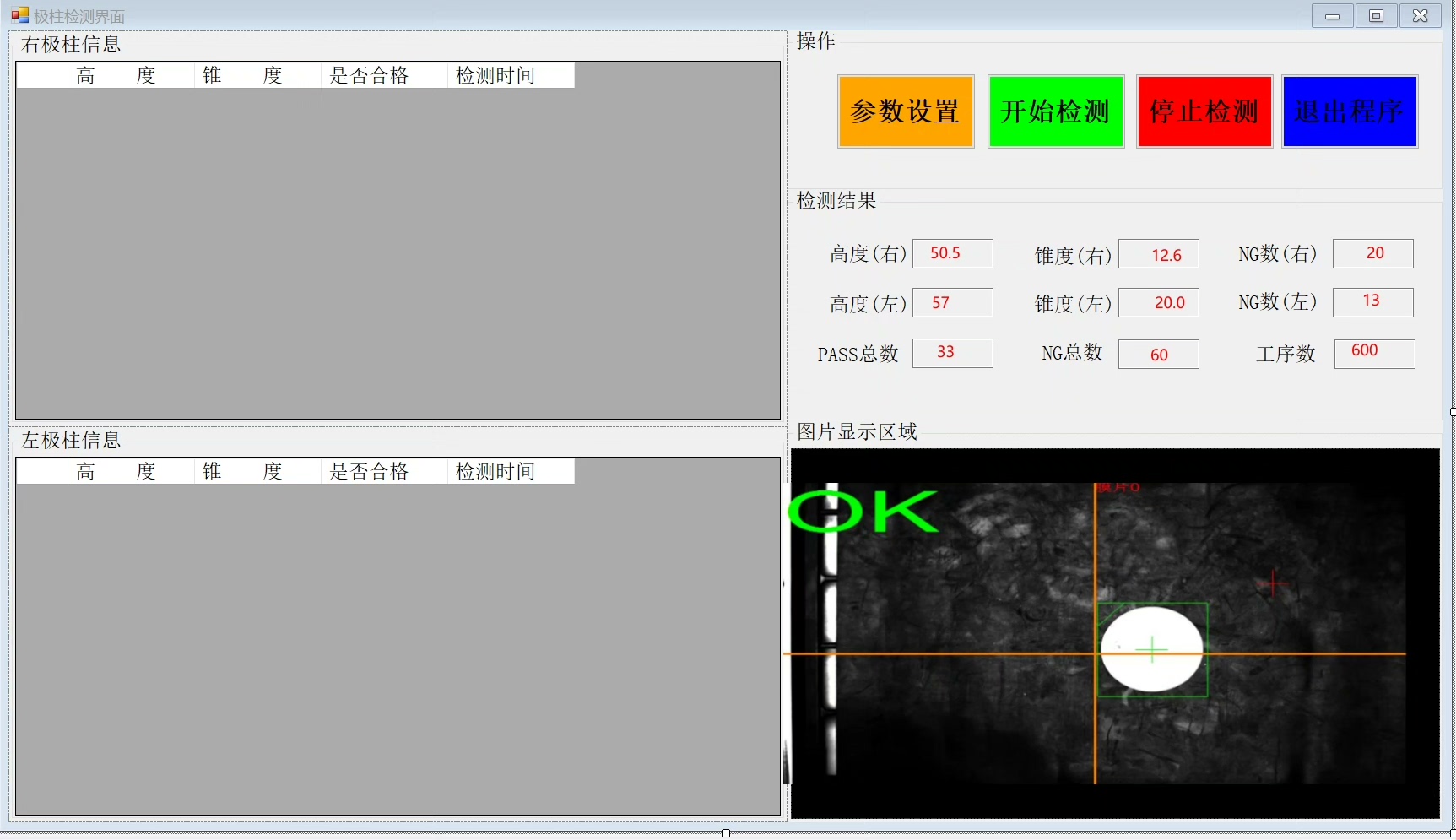
ErrorMsg (String)最近有个做锂电池检测的学员说模板匹配速度慢,后来发现是没启用ROI预处理。在Labview里把搜索区域从全图缩小到1/4面积后,处理时间直接从800ms降到120ms。所以算法优化真不一定是代码层面的,工程配置技巧更重要。
C#海康VM算法模板程序样例Labview通用视觉框架源码包含与各类PLC通讯的子函数,【注意:每个VM算法样例有视频讲解!】适合从零基础到高级的一整套学习源码加资料!
视频教程里有个彩蛋——第7集的4分23秒,讲师演示怎么绕过海康的算法加密狗做临时测试。虽然不推荐生产环境用,但对调试帮助挺大。话说回来,他们的深度学习模块训练出来的模型,部署时要注意输入图像的归一化方式,有个学员用OpenCV做预处理结果不准,后来发现海康的归一化是除以255再减0.5,和常规做法不一样。

整套资料里最值钱的是那套通讯故障排查手册,像三菱PLC的FX5U偶尔会报"无法建立连接",手册里写着要改GX Works3里的以太网模块参数,把TCP保持连接时间从默认120秒改成0(无限)。这些小经验省去了至少两周的踩坑时间。
(想看具体实现细节的话,每个算法样例配套的视频讲解里有现场演示,比看文档直观多了。特别是定位抓取的坐标系标定部分,建议开0.5倍速反复看)


腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 3
3 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)