matlab:基于RSSI的加权质心定位算法 - 将未知节点接收到来自锚节点的RSSI值转换成...
matlab:基于RSSI的加权质心定位算法 - 将未知节点接收到来自锚节点的RSSI值转换成距离 - 距离未知节点近的锚节点其距离值所占权重大 - 相比于原始质心定位算法提升了定位的精确度 - 注释详细
定位技术里有个经典问题——如何用一堆已知位置的锚节点确定未知设备的位置。今天咱们聊聊MATLAB环境下基于RSSI的加权质心定位,这个法子比传统质心法更会"听声辨位"。先上段核心代码镇楼:
function estimated_pos = weighted_centroid(anchors, rssi_values)
% 参数说明
% anchors: 锚节点坐标矩阵,每行代表一个锚节点的[x,y]
% rssi_values: 对应锚节点的RSSI值数组
d0 = 1; % 参考距离(米)
RSSI0 = -30; % 参考距离下的RSSI值
n = 3.5; % 路径损耗指数
% 将RSSI转换为距离
distances = d0 * 10.^((RSSI0 - rssi_values) / (10 * n));
% 计算权重(距离越近权重越大)
weights = 1 ./ distances.^2; % 平方反比加权
% 加权质心计算
weighted_x = sum(anchors(:,1) .* weights) / sum(weights);
weighted_y = sum(anchors(:,2) .* weights) / sum(weights);
estimated_pos = [weighted_x, weighted_y];
end别急着关页面,咱们先拆开来看。传统质心定位就像在广场上找人——把几个目击者说的位置取平均就完事了。但实际场景中,离目标越近的锚节点测距理应更准,这时候就需要"差别对待"。
代码里那个weights = 1 ./ distances.^2是关键魔法。假设锚节点A报的距离是2米,B报的是10米,那A的权重就是1/4,B只有1/100。相当于让近处的锚节点在计算中有更大的话语权。
RSSI转距离用了对数路径损耗模型:
distances = d0 * 10.^((RSSI0 - rssi_values) / (10 * n));这里n是环境衰减因子,地下室这类复杂环境可以设到4-6,开阔场地可能2-3。调试时如果发现定位总飘,优先检查这个参数准不准。
matlab:基于RSSI的加权质心定位算法 - 将未知节点接收到来自锚节点的RSSI值转换成距离 - 距离未知节点近的锚节点其距离值所占权重大 - 相比于原始质心定位算法提升了定位的精确度 - 注释详细
实际测试时建议搭配这段可视化代码:
% 生成模拟数据
anchors = [0 0; 5 5; 10 0]; % 三个锚节点构成三角形
true_pos = [3, 2]; % 真实位置
noise_level = 3; % RSSI噪声强度
% 生成带噪声的RSSI测量值
real_distances = vecnorm(anchors - true_pos, 2, 2);
rssi_measured = RSSI0 - 10*n*log10(real_distances/d0) + noise_level*randn(size(anchors,1),1);
% 两种算法对比
centroid_pos = mean(anchors); % 原始质心
weighted_pos = weighted_centroid(anchors, rssi_measured);
% 可视化
scatter(anchors(:,1), anchors(:,2), 'filled', 'DisplayName','锚节点');
hold on;
scatter(true_pos(1), true_pos(2), '^', 'DisplayName','真实位置');
scatter(centroid_pos(1), centroid_pos(2), 'x', 'DisplayName','原始质心');
scatter(weighted_pos(1), weighted_pos(2), 's', 'DisplayName','加权质心');
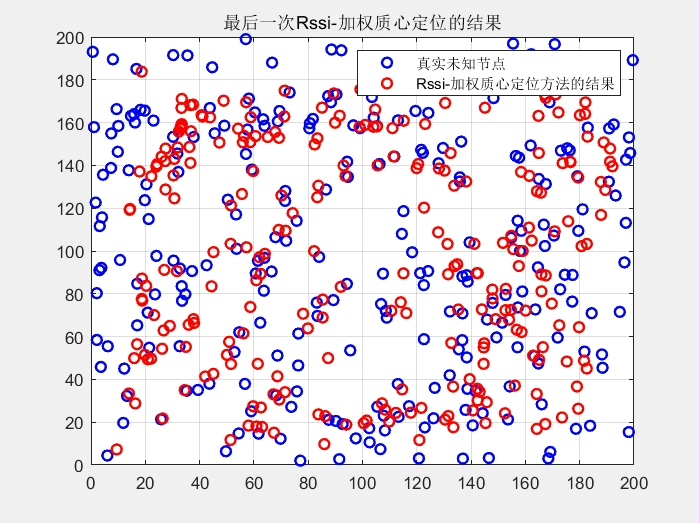
legend; axis equal; grid on;跑几次你会发现,加权算法(方块)总是比原始质心(叉号)更接近真实位置(三角)。特别是在锚节点分布不均匀时,改进效果更明显——比如当多数锚节点集中在某侧时,原始算法会被"带偏",而加权算法能通过距离评估自动平衡。
有个坑得提醒:RSSI值本身容易受多径效应影响,建议在实际应用时结合移动平均滤波。另外阈值的设置也有讲究,遇到RSSI特别弱的锚节点(比如距离超过20米),可以直接剔除避免引入过大误差。
最后留个思考题:如果把权重改成1./distances而不是平方反比,定位误差会变大还是变小?动手改改代码里的权重计算公式,答案可能出乎意料。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 5
5 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)