基于边缘形状的快速模板匹配:旋转操作与金属工件测试
基于边缘形状的快速模板匹配,有现成代码支持旋转操作 基于C++和opencv编写的。 并且可以提供部分金属工件数据进行测试。
在计算机视觉领域,模板匹配是一项常用的技术,用于在一幅图像中寻找与给定模板最匹配的区域。今天咱聊聊基于边缘形状的快速模板匹配,这一过程不仅支持旋转操作,而且是用C++ 和OpenCV实现的,还有金属工件数据可供测试,超有意思。
代码实现与分析
基础设置
首先,包含必要的头文件:
#include <opencv2/opencv.hpp>
#include <iostream>这里opencv2/opencv.hpp是OpenCV的核心头文件,包含了各种图像处理、计算机视觉算法等功能。iostream用于标准输入输出,方便我们在控制台打印一些调试信息。
读取图像
cv::Mat srcImage = cv::imread("source_image.jpg");
cv::Mat templateImage = cv::imread("template_image.jpg");
if (srcImage.empty() || templateImage.empty()) {
std::cout << "Could not open or find the images" << std::endl;
return -1;
}cv::imread函数用于读取图像,将源图像和模板图像分别读入srcImage和templateImage。如果读取失败,图像会为空,此时打印错误信息并返回 -1,结束程序。
边缘检测
cv::Mat srcEdges, templateEdges;
cv::Canny(srcImage, srcEdges, 50, 200);
cv::Canny(templateImage, templateEdges, 50, 200);采用Canny边缘检测算法,这是一种经典的边缘检测方法。cv::Canny函数的后两个参数是阈值,用于控制边缘检测的灵敏度。较低的阈值用于连接边缘,较高的阈值用于检测明显的边缘。对源图像和模板图像分别进行边缘检测,得到边缘图像srcEdges和templateEdges,这样在后续匹配时可以减少干扰,提高匹配的准确性。
旋转操作支持
要支持旋转操作,这里采用极坐标变换等一些技巧。虽然代码实现稍复杂,但思路很清晰。先定义旋转角度范围和步长:
const double angleStep = 10.0;
for (double angle = 0; angle < 360; angle += angleStep) {
cv::Mat rotatedTemplate;
cv::Point2f center(templateImage.cols / 2.0, templateImage.rows / 2.0);
cv::Mat rotMat = cv::getRotationMatrix2D(center, angle, 1.0);
cv::warpAffine(templateImage, rotatedTemplate, rotMat, templateImage.size());
// 对旋转后的模板进行边缘检测
cv::Mat rotatedEdges;
cv::Canny(rotatedTemplate, rotatedEdges, 50, 200);
// 进行模板匹配操作
cv::Mat result;
cv::matchTemplate(srcEdges, rotatedEdges, result, cv::TM_CCOEFF_NORMED);
double minVal, maxVal;
cv::Point minLoc, maxLoc;
cv::minMaxLoc(result, &minVal, &maxVal, &minLoc, &maxLoc);
if (maxVal > 0.8) {
// 匹配成功,绘制结果
cv::rectangle(srcImage, maxLoc, cv::Point(maxLoc.x + templateImage.cols, maxLoc.y + templateImage.rows), cv::Scalar(0, 255, 0), 2);
}
}这里以angleStep为步长,从0度到360度对模板图像进行旋转。cv::getRotationMatrix2D函数获取旋转矩阵,cv::warpAffine函数实现仿射变换,完成图像旋转。每次旋转后对模板图像进行边缘检测,再与源图像的边缘进行模板匹配(cv::matchTemplate)。匹配结果通过cv::minMaxLoc获取最大值和位置,如果匹配度(maxVal)大于0.8,认为匹配成功,在源图像上绘制矩形标记出匹配区域。
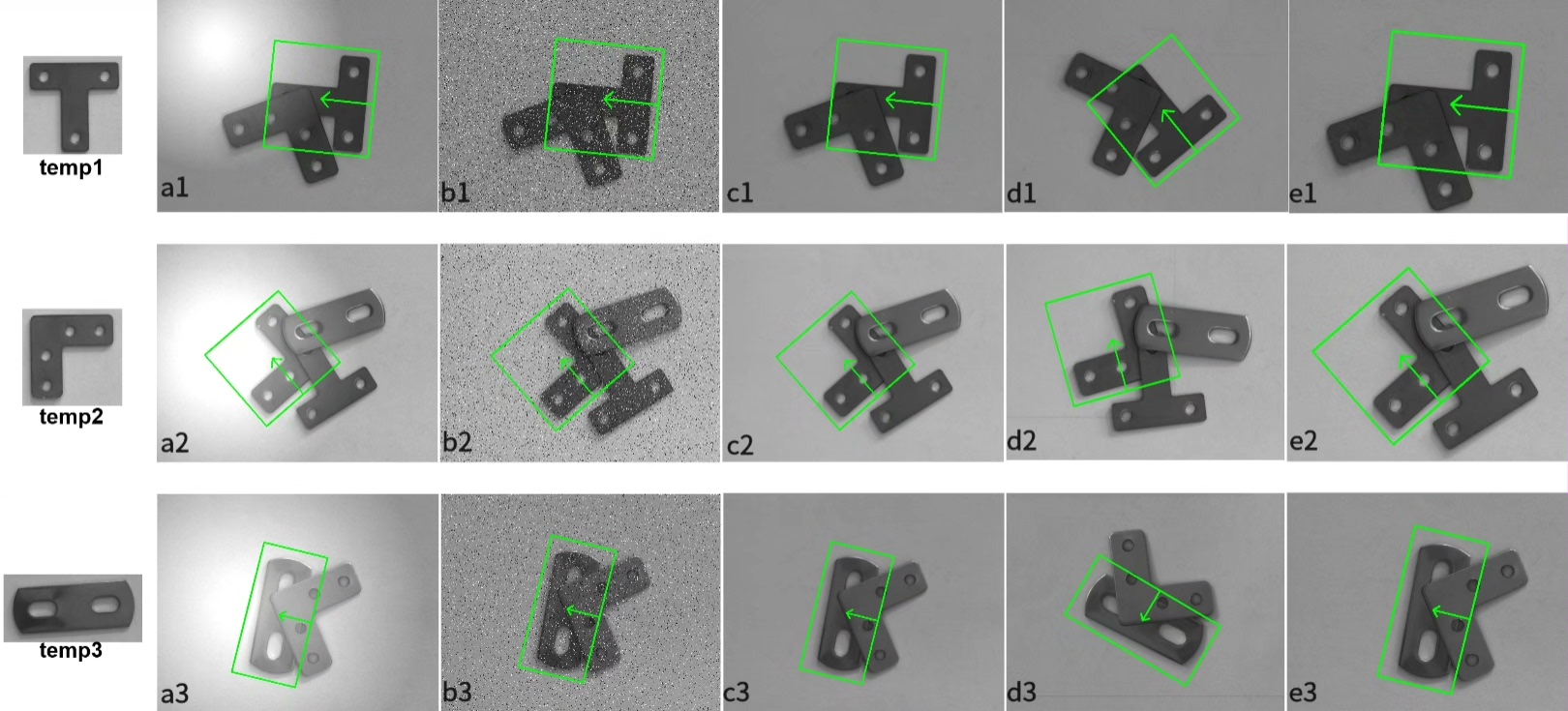
金属工件数据测试
手上有部分金属工件数据,用这些数据进行测试非常直观。把金属工件的图像作为源图像,对应的模板图像也准备好。运行上面的代码,就能看到在不同旋转角度下,模板与金属工件图像的匹配情况。这对于工业生产中检测金属工件是否符合标准形状等应用场景很有帮助。通过不断调整边缘检测阈值、旋转步长等参数,可以优化匹配效果,使其更适合实际的金属工件检测需求。
基于边缘形状的快速模板匹配,有现成代码支持旋转操作 基于C++和opencv编写的。 并且可以提供部分金属工件数据进行测试。
基于边缘形状的快速模板匹配,结合旋转操作,在C++ 和OpenCV的支持下,无论是在理论研究还是实际应用(如金属工件检测)上,都展现出了强大的功能和潜力,感兴趣的小伙伴不妨深入研究一下,搞不好能在自己的项目中发挥大作用呢。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 0
0 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)