用霍夫变换HoughLines检测直线3
书名:OpenCV计算机视觉编程攻略(第3版)
作者:[加]罗伯特·拉戈尼尔
译者:相银初
出版社:人民邮电出版社
出版时间:2018-05
ISBN:9787115480934
一、实现原理
1、累加器
-
霍夫变换的目的是在二值图像中找出全部直线,并且这些直线必须穿过足够多的像素点。
它的处理方法是,检查输入的二值分布图中每个独立的像素点,识别出穿过该像素点的所有可能直线。
如果同一条直线穿过很多像素点,就说明这条直线明显到足以被认定。 -
为了统计某条直线被标识的次数,霍夫变换使用了一个二维累加器。
累加器的大小依据(ρ, θ)的步长确定,其中(ρ, θ)参数用来表示一条直线。
为了说明霍夫变换的功能,我们建立一个180×200的矩阵(对应θ的步长为π/180, ρ的步长为1):
// 创建霍夫累加器
// 这里的图像类型为uchar;实际使用时应该用int
cv::Mat acc(200,180, CV_8U, cv::Scalar(0));
- 累加器是不同于(ρ, θ)值的映射表。
因此,矩阵的每个入口都对应一条特定的直线。
现在假定某个像素点的坐标为(50,30),这样就能通过循环遍历所有可能的θ值(步长π/180),并计算对应的(四舍五入)ρ值,标识出穿过这个像素点的全部直线:
// 选取一个像素点
int x=50, y=30;
// 循环遍历所有角度
for (int i=0; i<180; i++) {
double theta= i*PI/180.;
// 找到对应的rho值
double rho= x*std::cos(theta)+y*std::sin(theta);
// j对应-100~100 的rho
int j= static_cast<int>(rho+100.5);
std::cout << i << ", " << j << std::endl;
// 增值累加器
acc.at<uchar>(j, i)++;
}
-
每次计算得到(ρ, θ)对后,其对应的累加器入口的数值就会增加,表示对应的直线穿过了图像中的某个像素点(或者说每个像素点为一批候选直线投票)。
如果把累加器作为图像显示(翻转过来,并乘以100,以便数字1能显示),结果如下所示。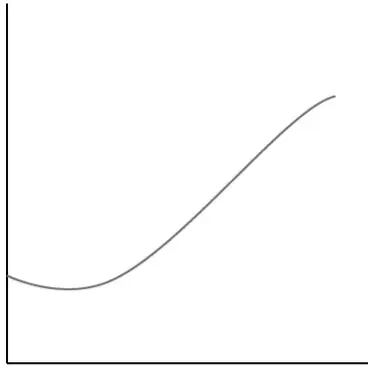
-
上面的曲线表示穿过这个点的所有直线的集合。现在用像素点(30, 10)重复上述过程,得到的累加器如下所示。
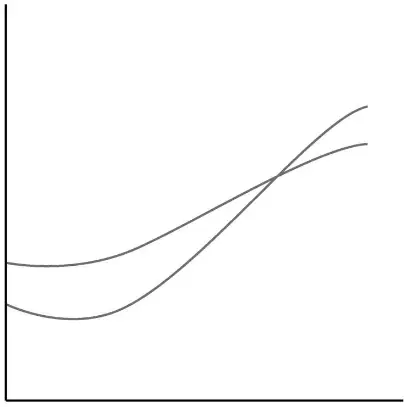
-
可以看到,这两条曲线在一个位置相交,这个位置表示对应的直线通过了这两个像素点。累加器的对应入口收到了两次投票,表明有两个像素点在这条直线上。
-
如果对二值分布图中的所有像素点重复上述过程,那么同一条直线上的像素点会使累加器的同一个入口增长很多次。
最后,为了检测图像中的直线(即像素点对齐的位置),只需要标识出累加器中的局部限值,该累加器用于接收大量投票数。
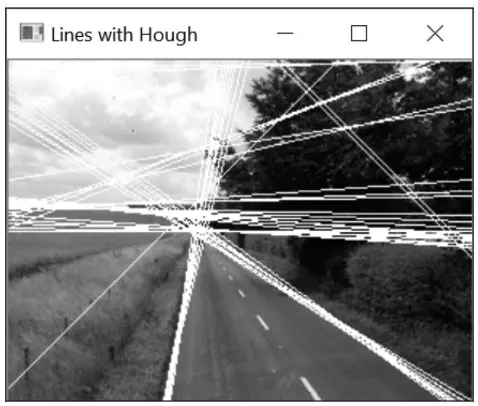
cv::HoughLines函数的最后一个参数表示最低投票数,只有不低于这个数的直线才会被检测到。这表明最低投票数越小,检测到的直线数量就越多。 -
如果把例子中的数值降为50,检测到的直线就如下图所示。
2、概率霍夫变换
- 概率霍夫变换对基本算法做了一些修正。
首先,概率霍夫变换在二值分布图上随机选择像素点,而不是系统性地逐行扫描图像。一旦累加器的某个入口达到了预设的最小值,就沿着对应的直线扫描图像,并移除在这条直线上的所有像素点(包括还没投票的像素点)。
这个扫描过程还检测可以接受的线段长度。
为此,算法定义了两个额外的参数:一个是允许的线段最小长度,另一个是组成连续线段时允许的最大像素间距。
这个额外的步骤增加了算法的复杂度,但也得到了一定的补偿——由于在扫描直线的过程中已经清除了部分像素点,因此减少了投票过程中用到的像素点。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 13
13 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)