无人车轨迹规划:基于代价函数的最优轨迹探索(Matlab实现)
无人车轨迹规划,利用代价函数求解最优轨迹,matlab程序 这个程序是一个用于车辆导航和避障的示例。它使用了一种基于目标函数和障碍函数的规划方法,通过计算不同方向上的函数值来选择最佳移动方向,并模拟车辆在真实环境中移动的过程。 程序的主要功能是模拟车辆在给定的区域内避开障碍物并达到目标位置。它使用了一些参数来控制规划过程,如步长、感知点数量、感知半径等。程序通过计算障碍函数和目标函数的值来评估每个感知点的优劣,然后选择具有最小函数值的方向作为最佳移动方向。车辆在移动时还考虑到了环境的不确定性,通过扰动最终位置来模拟实际情况。 程序的主要思路是通过优化规划函数来指导车辆的移动,使其在避开障碍物的同时朝着目标位置前进。障碍函数和目标函数的设计是关键,它们可以根据具体的应用场景进行调整和优化。 程序的运行过程如下: 1. 初始化参数和变量。 2. 绘制初始位置、障碍物和目标位置的图形。 3. 计算障碍函数和目标函数的值,并绘制函数图像。 4. 进入主循环,进行规划和移动。 5. 在每次循环中,先进行边界检查,确保车辆位置在搜索区域内。 6. 然后,感知周围的障碍物和目标点,计算函数值。 7. 选择具有最小函数值的方向作为最佳移动方向。 8. 根据最佳方向和步长更新车辆位置,并考虑环境不确定性。 9. 循环执行以上步骤,直到达到最大迭代次数。 10. 绘制车辆的轨迹和避障路径。 程序涉及的知识点包括:基本的数学计算、图形绘制、优化算法和规划方法等。对于零基础的程序员来说,可以通过理解程序的结构和每个部分的功能来逐步学习和理解相关知识。 程序中还包含了两个子函数:goalfunction和obstaclefunction。goalfunction用于计算目标函数的值,它根据车辆当前位置和目标位置之间的距离来评估函数值。obstaclefunction用于计算障碍函数的值,它根据感知点与障碍物之间的距离来评估函数值。这两个函数的设计可以根据具体需求进行修改和优化。 总之,这个程序是一个简单的车辆导航和避障示例,通过规划和优化方法来指导车辆的移动。它可以应用在自动驾驶、机器人导航等领域,帮助车辆避开障碍物并达到目标位置。
在无人车领域,轨迹规划是核心问题之一。今天咱就聊聊利用代价函数求解最优轨迹的Matlab程序,这可是车辆导航与避障的一个实用示例。
这个程序的思路是基于目标函数和障碍函数的规划方法,计算不同方向函数值,选最佳移动方向,模拟车辆真实移动过程。
程序主要功能与运行过程
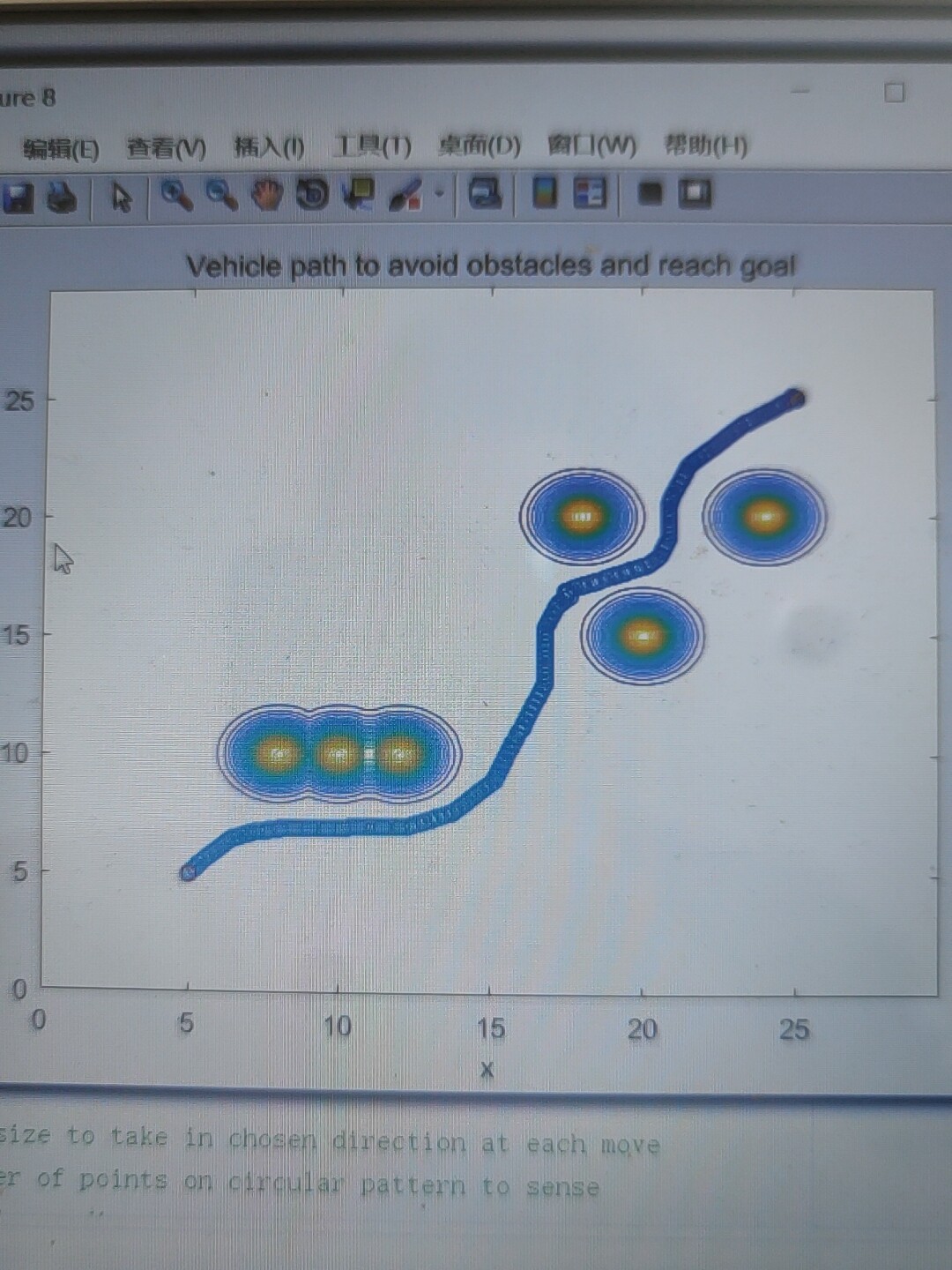
它的主要功能是让车辆在给定区域避开障碍物,成功抵达目标位置。这里面用到不少参数,像步长、感知点数量、感知半径等,来控制规划进程。通过算障碍函数和目标函数值,评估每个感知点好坏,挑函数值最小方向作为最佳移动方向,同时还考虑环境不确定性,扰动最终位置模拟实际。
具体运行过程如下:
1. 初始化参数和变量
% 初始化参数
step_size = 0.1; % 步长
num_sensors = 10; % 感知点数量
sensor_radius = 1; % 感知半径
max_iterations = 100; % 最大迭代次数
% 初始化车辆位置、目标位置和障碍物位置
vehicle_position = [0, 0];
goal_position = [1, 1];
obstacles = [0.5, 0.5]; 这里定义了一系列关键参数,步长决定每次移动距离,感知点数量影响对周围环境感知精度,感知半径划定感知范围,最大迭代次数限制程序运行时长。同时设定车辆、目标和障碍物初始位置。
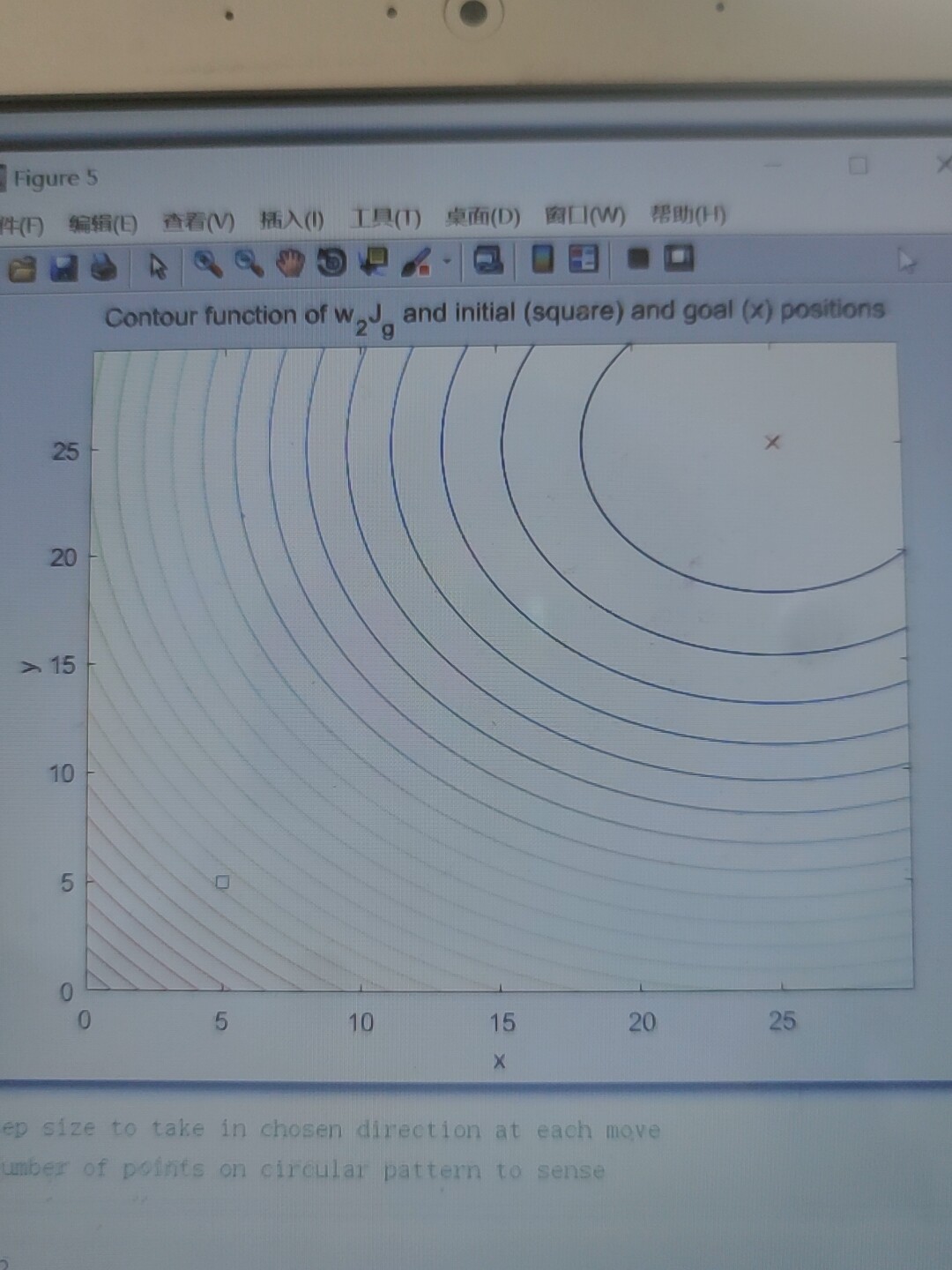
2. 绘制初始位置、障碍物和目标位置的图形
figure;
hold on;
plot(vehicle_position(1), vehicle_position(2), 'ro', 'DisplayName', 'Vehicle');
plot(goal_position(1), goal_position(2), 'go', 'DisplayName', 'Goal');
plot(obstacles(:, 1), obstacles(:, 2), 'ko', 'DisplayName', 'Obstacles');
axis([-2, 2, -2, 2]);
grid on;
legend;利用Matlab绘图函数,把车辆、目标和障碍物位置在坐标系上展示出来,方便直观查看初始状态。
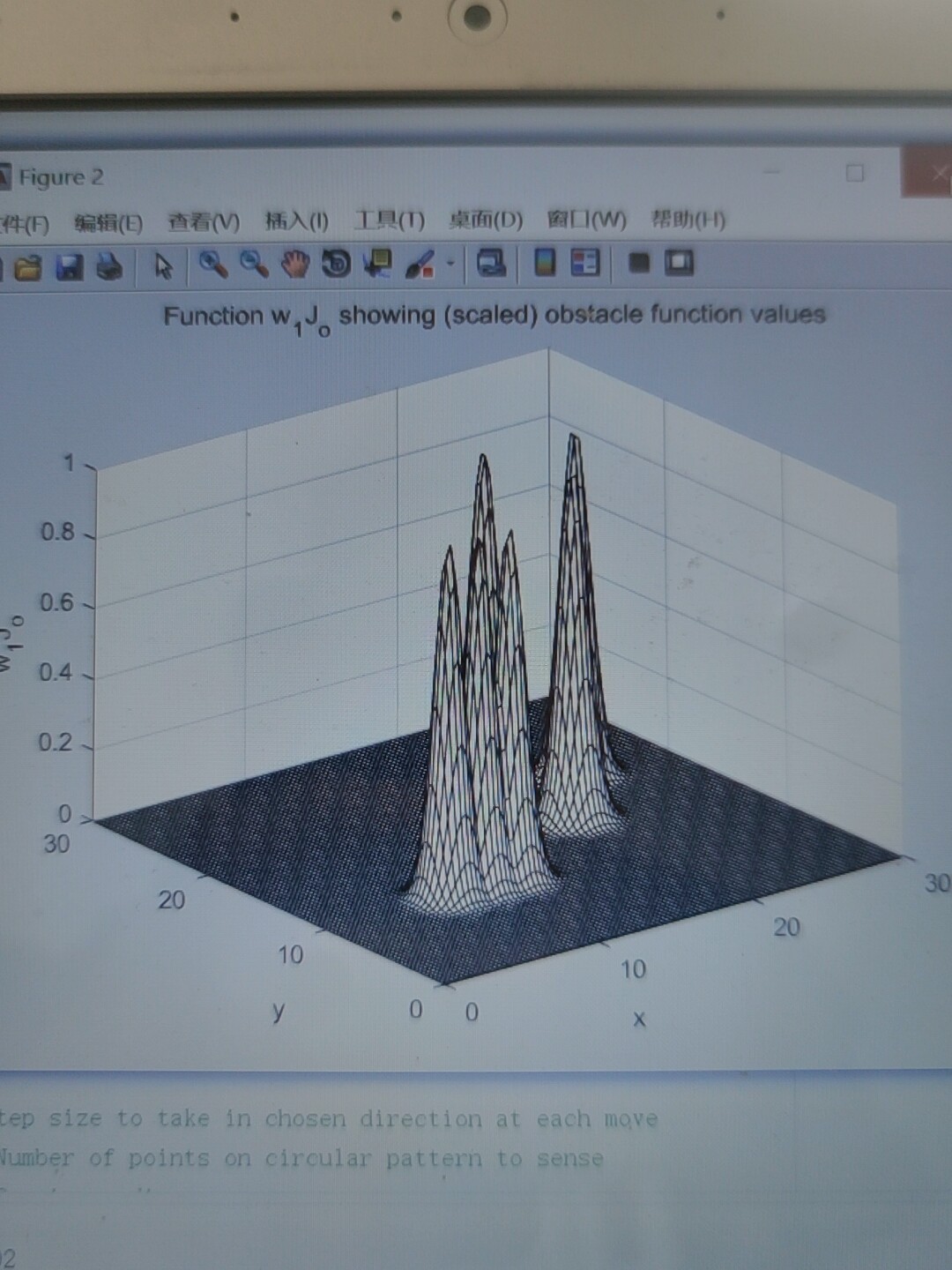
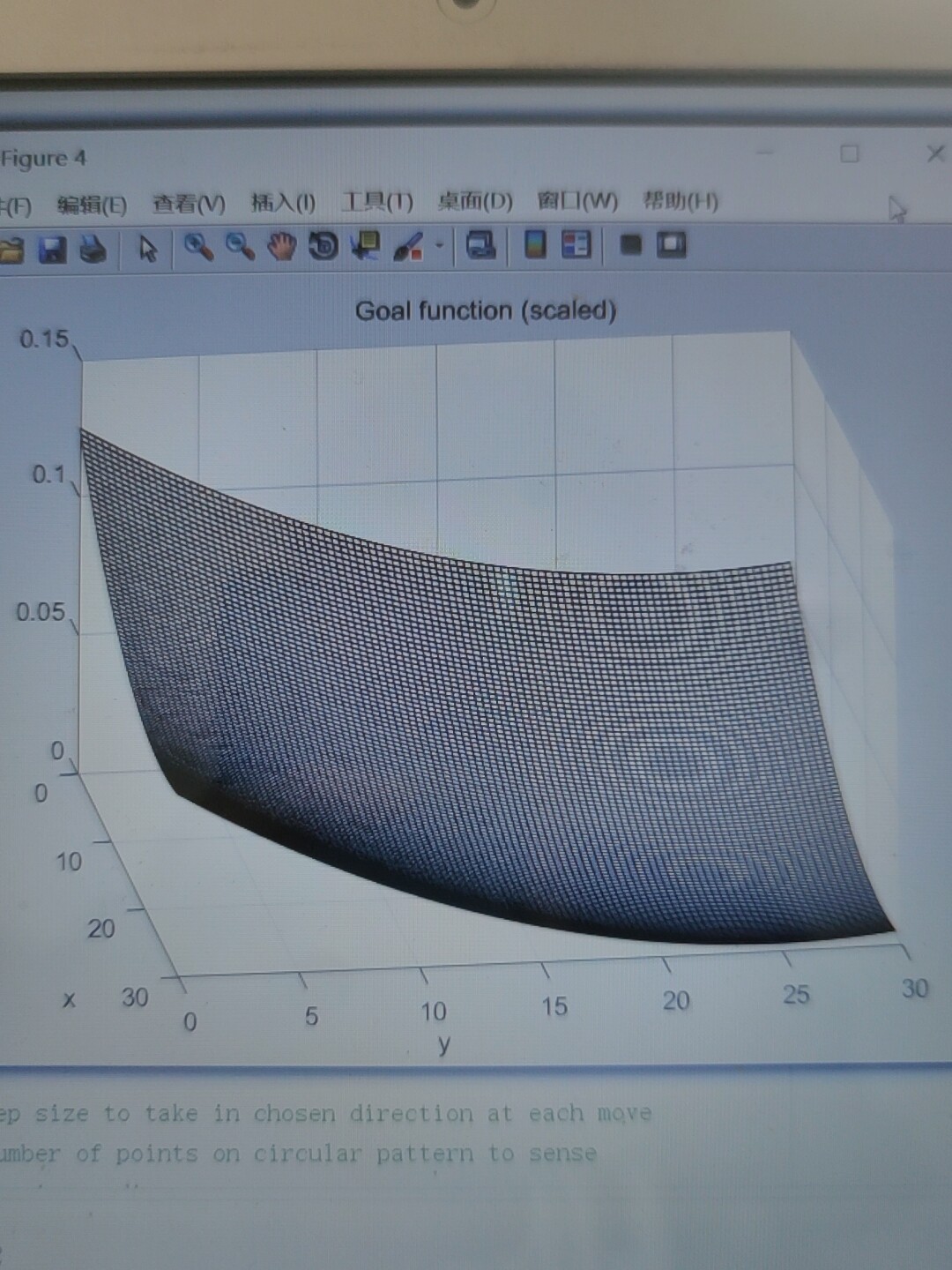
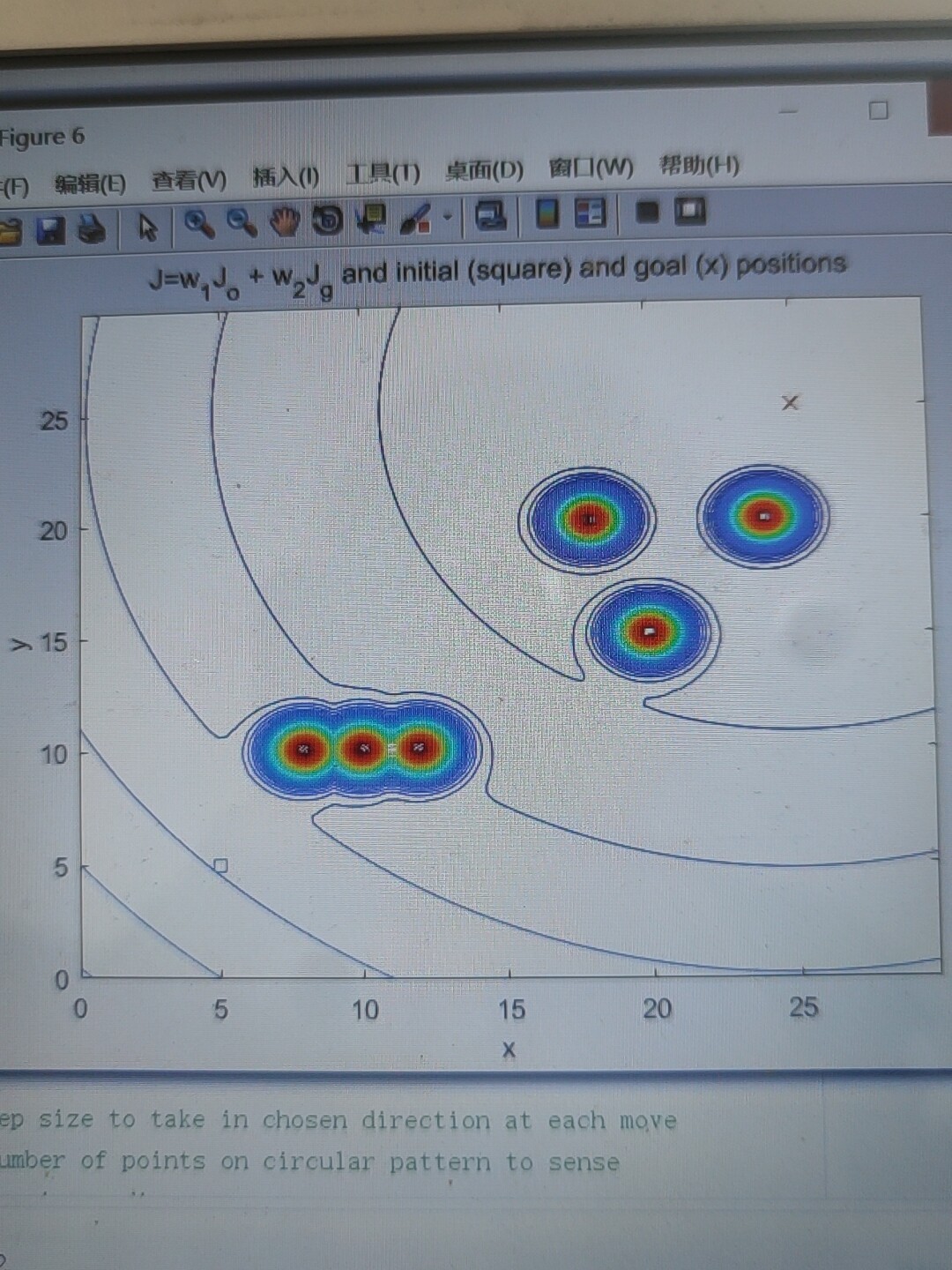
3. 计算障碍函数和目标函数的值,并绘制函数图像
% 这部分代码可根据实际情况在函数内添加绘图逻辑
% 比如在obstaclefunction和goalfunction函数中
% 以obstaclefunction为例
function obstacle_value = obstaclefunction(sensor_point, obstacles)
distances = sqrt((sensor_point(1) - obstacles(:, 1)).^2 + (sensor_point(2) - obstacles(:, 2)).^2);
obstacle_value = sum(1./distances);
% 这里可以添加绘图代码,比如绘制距离与障碍函数值关系图
end通过自定义的obstaclefunction和goalfunction函数分别计算障碍函数和目标函数值,这里简单示意了obstaclefunction函数,它通过计算感知点与障碍物距离来确定障碍函数值。
4. 进入主循环,进行规划和移动
trajectory = zeros(max_iterations, 2);
for iter = 1:max_iterations
% 5. 边界检查
if any(vehicle_position < [-2, -2]) || any(vehicle_position > [2, 2])
disp('Vehicle out of search area!');
break;
end
% 6. 感知周围障碍物和目标点,计算函数值
sensor_angles = linspace(0, 2*pi, num_sensors);
sensor_points = repmat(vehicle_position, num_sensors, 1) + sensor_radius * [cos(sensor_angles); sin(sensor_angles)]';
goal_values = zeros(num_sensors, 1);
obstacle_values = zeros(num_sensors, 1);
for i = 1:num_sensors
goal_values(i) = goalfunction(sensor_points(i, :), goal_position);
obstacle_values(i) = obstaclefunction(sensor_points(i, :), obstacles);
end
total_values = goal_values + obstacle_values;
% 7. 选择具有最小函数值的方向作为最佳移动方向
[~, best_index] = min(total_values);
best_direction = sensor_points(best_index, :) - vehicle_position;
% 8. 更新车辆位置并考虑环境不确定性
new_position = vehicle_position + step_size * best_direction / norm(best_direction);
% 考虑环境不确定性,这里简单加个小扰动
new_position = new_position + 0.05 * randn(1, 2);
vehicle_position = new_position;
trajectory(iter, :) = vehicle_position;
end主循环里,先检查车辆是否在搜索区域内,然后通过设定不同角度感知周围情况,计算各感知点目标函数和障碍函数值,相加得到总函数值,找出最小值对应的方向作为最佳移动方向。更新位置时,除了按最佳方向和步长移动,还加个小扰动模拟环境不确定性,同时记录轨迹。
9. 循环执行以上步骤,直到达到最大迭代次数
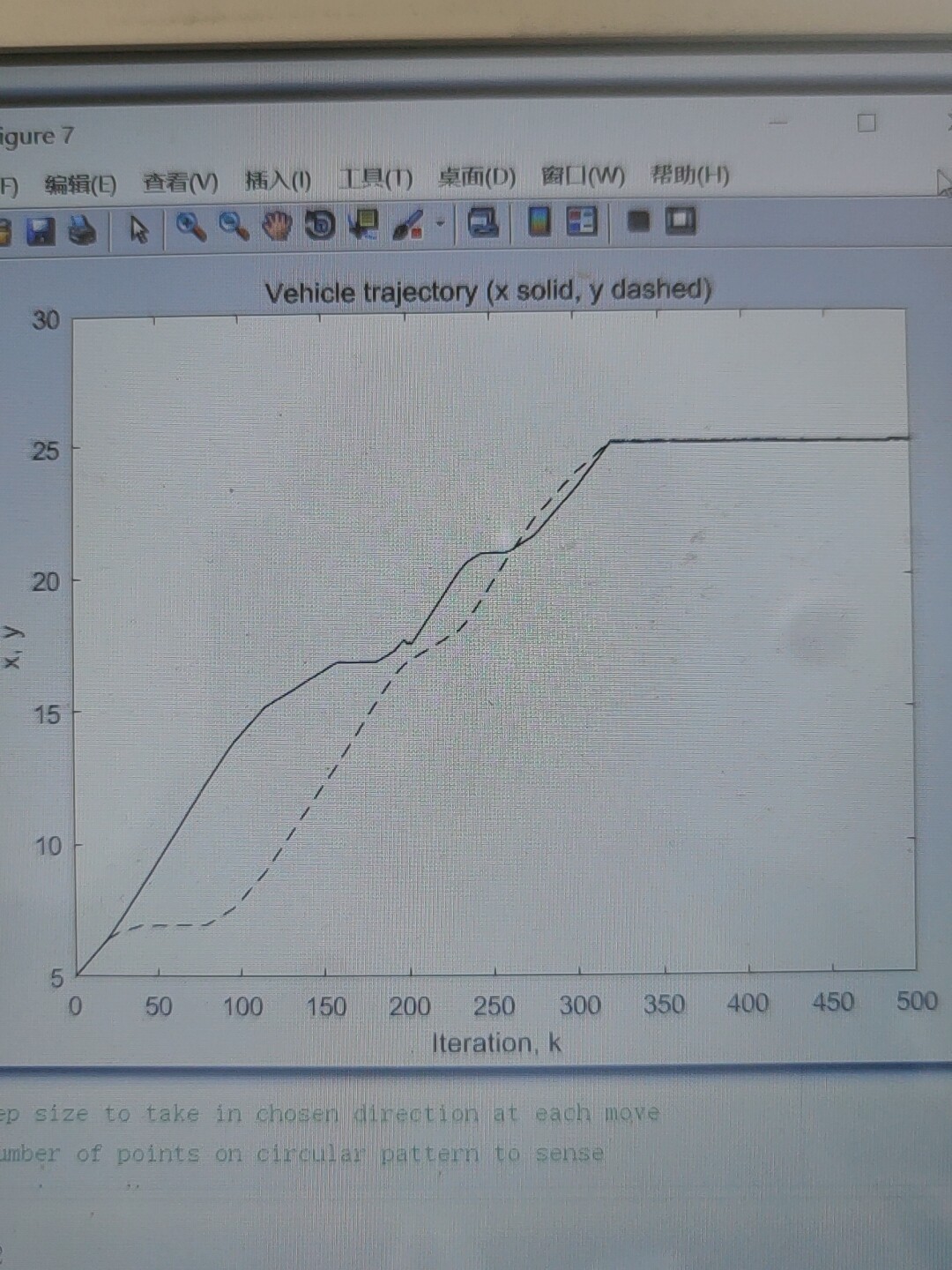
10. 绘制车辆的轨迹和避障路径
plot(trajectory(:, 1), trajectory(:, 2), 'b--', 'DisplayName', 'Trajectory');
hold off;循环结束后,绘制出车辆的行驶轨迹。
子函数解析
程序里有俩重要子函数:goalfunction和obstaclefunction。
无人车轨迹规划,利用代价函数求解最优轨迹,matlab程序 这个程序是一个用于车辆导航和避障的示例。它使用了一种基于目标函数和障碍函数的规划方法,通过计算不同方向上的函数值来选择最佳移动方向,并模拟车辆在真实环境中移动的过程。 程序的主要功能是模拟车辆在给定的区域内避开障碍物并达到目标位置。它使用了一些参数来控制规划过程,如步长、感知点数量、感知半径等。程序通过计算障碍函数和目标函数的值来评估每个感知点的优劣,然后选择具有最小函数值的方向作为最佳移动方向。车辆在移动时还考虑到了环境的不确定性,通过扰动最终位置来模拟实际情况。 程序的主要思路是通过优化规划函数来指导车辆的移动,使其在避开障碍物的同时朝着目标位置前进。障碍函数和目标函数的设计是关键,它们可以根据具体的应用场景进行调整和优化。 程序的运行过程如下: 1. 初始化参数和变量。 2. 绘制初始位置、障碍物和目标位置的图形。 3. 计算障碍函数和目标函数的值,并绘制函数图像。 4. 进入主循环,进行规划和移动。 5. 在每次循环中,先进行边界检查,确保车辆位置在搜索区域内。 6. 然后,感知周围的障碍物和目标点,计算函数值。 7. 选择具有最小函数值的方向作为最佳移动方向。 8. 根据最佳方向和步长更新车辆位置,并考虑环境不确定性。 9. 循环执行以上步骤,直到达到最大迭代次数。 10. 绘制车辆的轨迹和避障路径。 程序涉及的知识点包括:基本的数学计算、图形绘制、优化算法和规划方法等。对于零基础的程序员来说,可以通过理解程序的结构和每个部分的功能来逐步学习和理解相关知识。 程序中还包含了两个子函数:goalfunction和obstaclefunction。goalfunction用于计算目标函数的值,它根据车辆当前位置和目标位置之间的距离来评估函数值。obstaclefunction用于计算障碍函数的值,它根据感知点与障碍物之间的距离来评估函数值。这两个函数的设计可以根据具体需求进行修改和优化。 总之,这个程序是一个简单的车辆导航和避障示例,通过规划和优化方法来指导车辆的移动。它可以应用在自动驾驶、机器人导航等领域,帮助车辆避开障碍物并达到目标位置。
goalfunction计算目标函数值,根据车辆当前位置和目标位置距离评估,距离越近函数值越小,说明越接近目标。
obstaclefunction计算障碍函数值,依据感知点与障碍物距离评估,距离障碍物越远函数值越小,代表该方向越安全。这俩函数设计很关键,可按具体应用场景调整优化。
总之,这个程序虽简单,但通过规划和优化方法指导车辆移动,在自动驾驶、机器人导航等领域能发挥大作用,帮车辆避开障碍到达目标。对零基础程序员,从理解程序结构和各部分功能入手,能逐步掌握相关知识。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 17
17 0
0- 0



 已为社区贡献18条内容
已为社区贡献18条内容

所有评论(0)