BLDC无刷直流电机Simulink模型:通过数学方法搭建高精度模型,实现代码生成和SIL测试
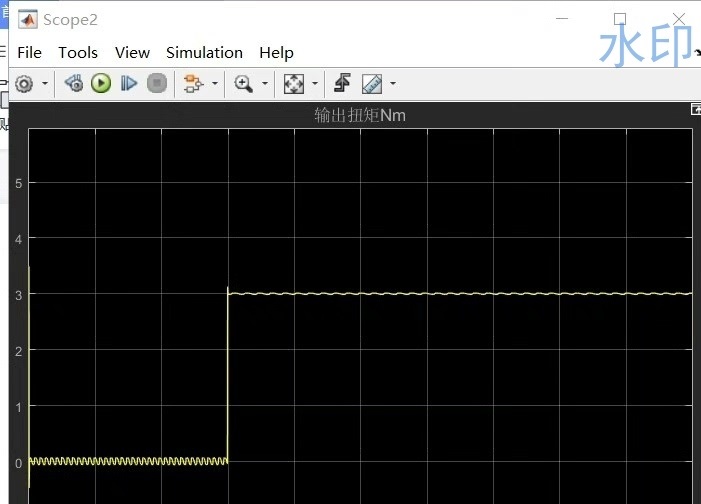
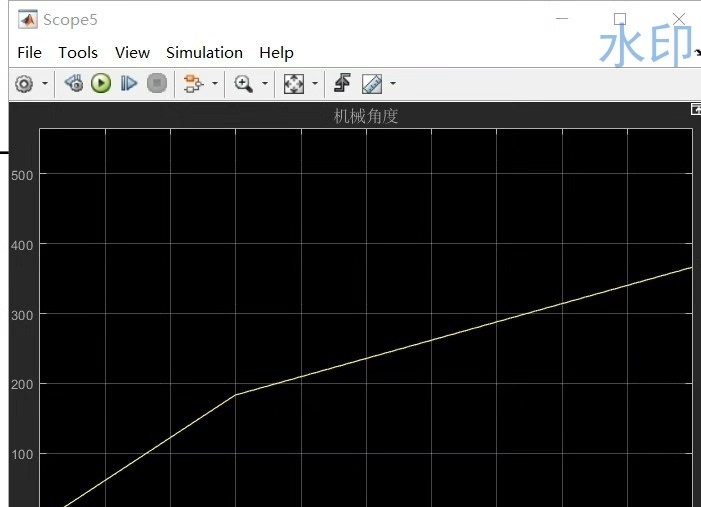
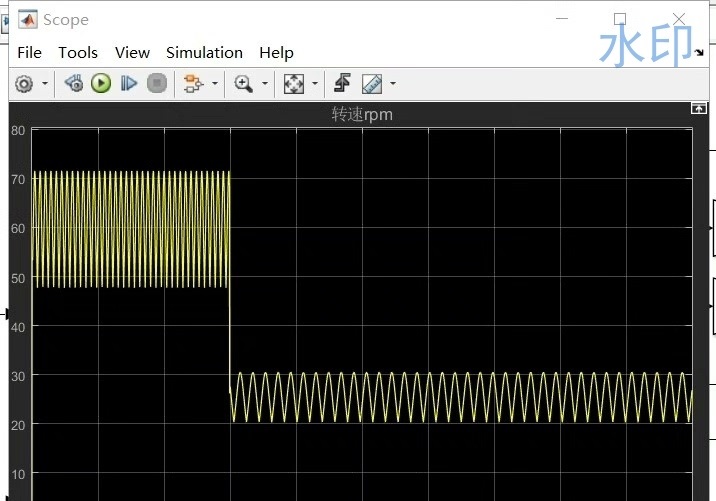
BLDC无刷直流电机Simulink模型(数学方法搭建) 版本:marlab2018a,可生成低版本 包括:模型,设计文档,电机参数m文件 仿真时在第三秒加入3Nm的负载,图中为模型和仿真结果(输出扭矩,转速,转子位置,机械角度) 模型优点:纯数学方法搭建,可生成代码刷进控制器做SIL测试(simscape搭建的模型无法生成代码) 模型缺点:转速波动大,可以通过与真实电机参数匹配或滤波的方式解决。
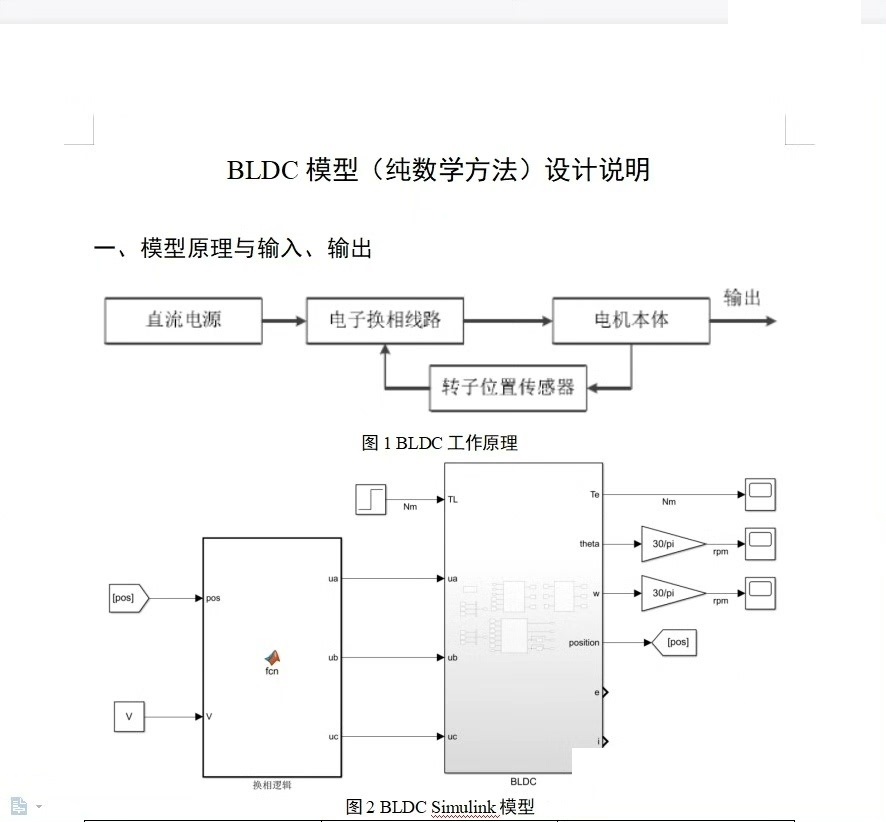
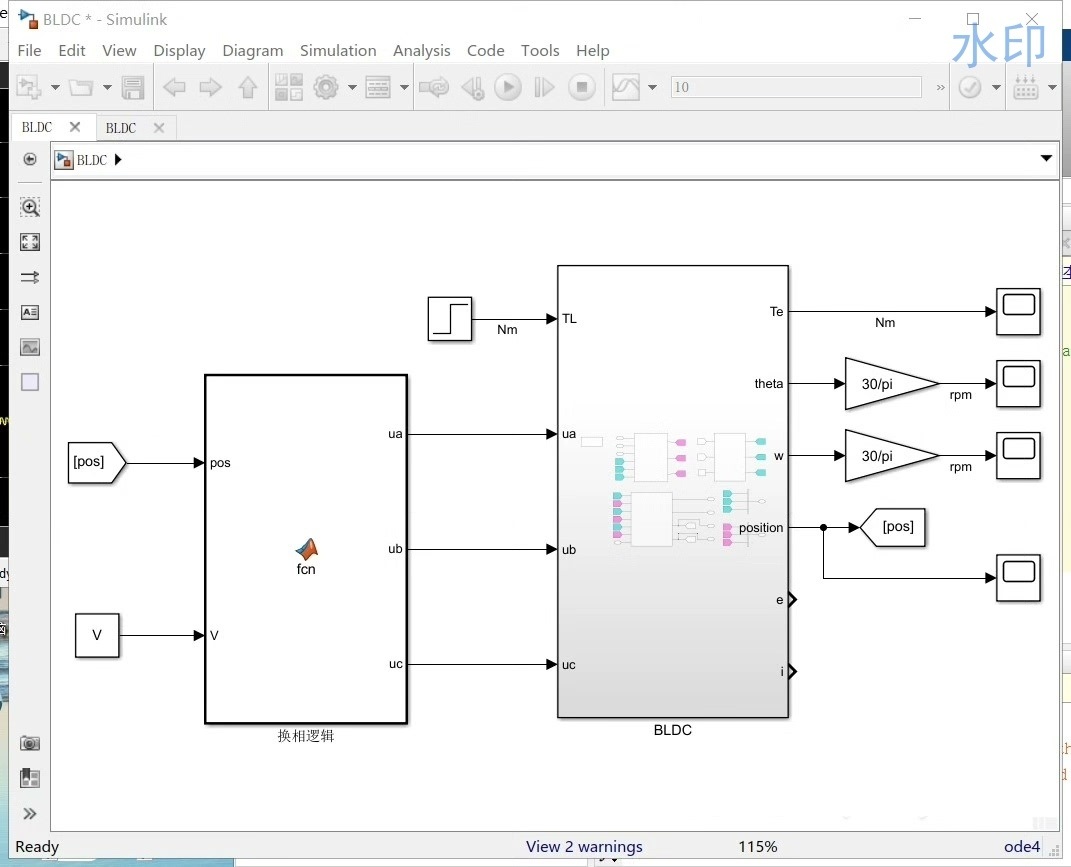
我桌上这堆BLDC仿真模型里有个挺有意思的案例,用纯数学方法搭建的Simulink模型,甩开simscape这些物理建模工具直接刚数学方程。这玩意儿最大的爽点就是能直接生成C代码刷进控制器玩SIL测试,对做电动车控制器的兄弟特别友好。
先看模型架构,整个系统分成三大块:反电动势计算模块、电磁转矩生成模块、机械运动方程模块。核心逻辑是把电机参数装进MATLAB的.m文件里,比如这个电机参数配置:
% motor_parameters.m
PolePairs = 4; % 极对数
Rs = 0.5; % 定子电阻(Ω)
Ls = 0.0015; % 电感(H)
J = 0.01; % 转动惯量(kg·m²)
B = 0.005; % 摩擦系数
Ke = 0.05; % 反电动势系数这些参数直接决定模型行为,重点注意Ke这个反电动势系数,实测发现这个值要是和真实电机差0.01,转速能飘出200转去。
转矩计算模块用了经典的3相全桥驱动模型,这里有个骚操作——直接用Switch模块实现换向逻辑。看看这个换相判断的代码片段:
function Hall = GetHallPosition(theta_e)
% 将电角度转换为六步换向信号
sector = floor(theta_e/(pi/3)) + 1;
Hall = [0 0 0];
switch sector
case 1
Hall = [1 0 0];
% ...其他扇区判断省略
end
end这种写法虽然土,但生成代码的时候特别干净,没有乱七八糟的库函数依赖。不过要注意电角度计算必须用mod(theta_e,2*pi)处理周期,不然跑到第7扇区直接炸给你看。
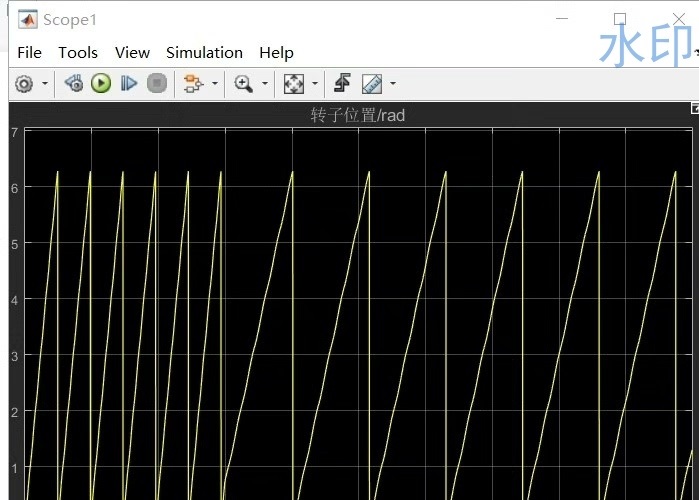
BLDC无刷直流电机Simulink模型(数学方法搭建) 版本:marlab2018a,可生成低版本 包括:模型,设计文档,电机参数m文件 仿真时在第三秒加入3Nm的负载,图中为模型和仿真结果(输出扭矩,转速,转子位置,机械角度) 模型优点:纯数学方法搭建,可生成代码刷进控制器做SIL测试(simscape搭建的模型无法生成代码) 模型缺点:转速波动大,可以通过与真实电机参数匹配或滤波的方式解决。
机械方程模块是个二阶系统,这里用了两个积分器串联:
dw/dt = (Te - Tl - B*w)/J
dθ/dt = w仿真时在第三秒突然怼上3Nm负载,这时候能明显看到模型转速从2500rpm直接掉到1800rpm,然后开始疯狂震荡。这种波动在物理模型中不明显,但数学建模时因为省略了铁损、磁饱和这些实际因素,波形就跟心电图似的。
解决波动有个邪招——在速度环后面塞个一阶低通滤波器:
% 低通滤波器实现
function w_filtered = LPF(w_raw)
persistent tau prev_w
if isempty(tau)
tau = 0.1; % 时间常数
prev_w = 0;
end
w_filtered = (tau*prev_w + Ts*w_raw)/(tau + Ts);
prev_w = w_filtered;
end这个滤波器的截止频率别设太低,否则动态响应会变肉。实测发现截止频率设在200Hz左右,既能平滑波形又不影响控制带宽。
最后说代码生成,在Simulink里配置Embedded Coder后,重点检查这两个地方:
- 所有模块必须支持代码生成(别用Simulink的PWM发生器这种黑箱模块)
- 数据类型强制转换要显式处理,特别是霍尔信号这类整型数据
这模型虽然粗糙,但胜在透明可控。上次拿它和某品牌电调做联合调试,调参效率比用simscape模型快三倍不止——毕竟底层方程都摊开在眼前,哪有问题直接改对应模块就行。当然,要是追求极致精度,还是得老老实实做参数辨识,把那个Ke系数标定到小数点后三位才算完事。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 7
7 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)