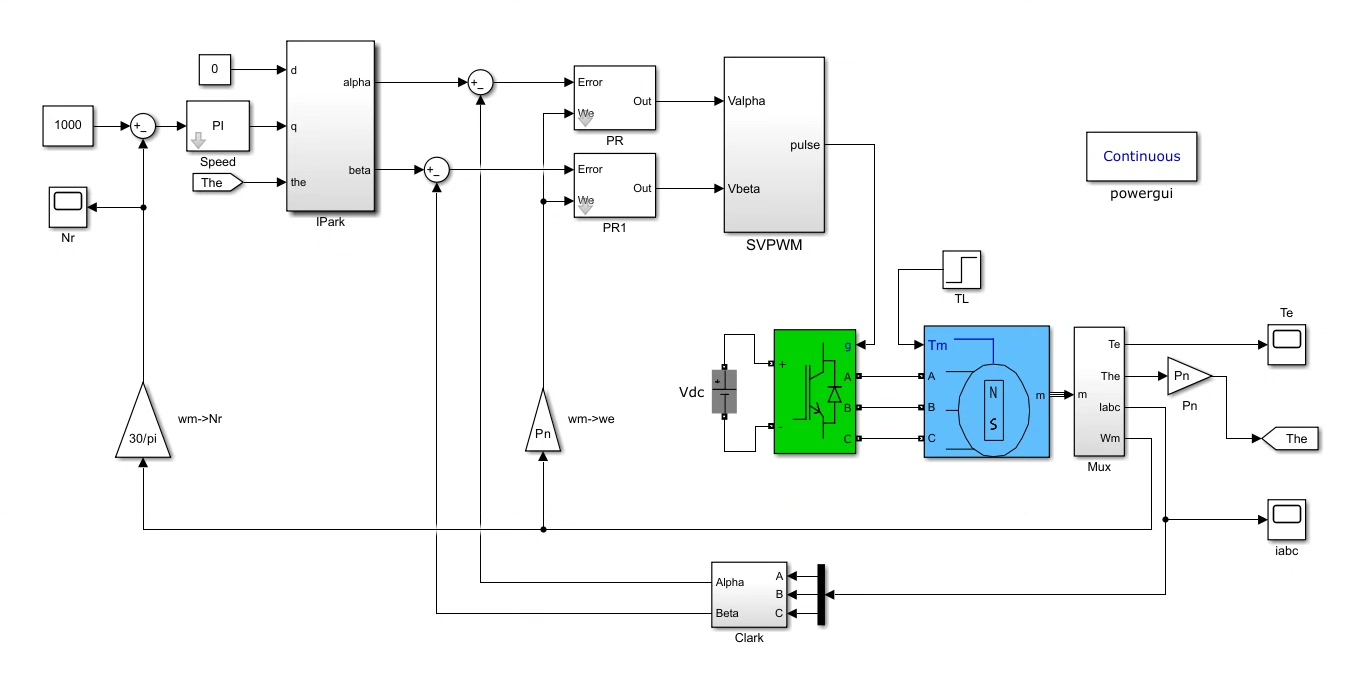
永磁同步电机比例谐振控制(PR)Simulink 仿真:静止坐标系下的 PMSM 矢量控制
永磁同步电机比例谐振控制(PR)simulink仿真静止坐标系下的PMSM矢量控制。 主要模块:逆变器+PR+SVPWM等等。 控制附上各部分模块详细介绍及参考资料。 仿真模型仅用于学习交流使用。
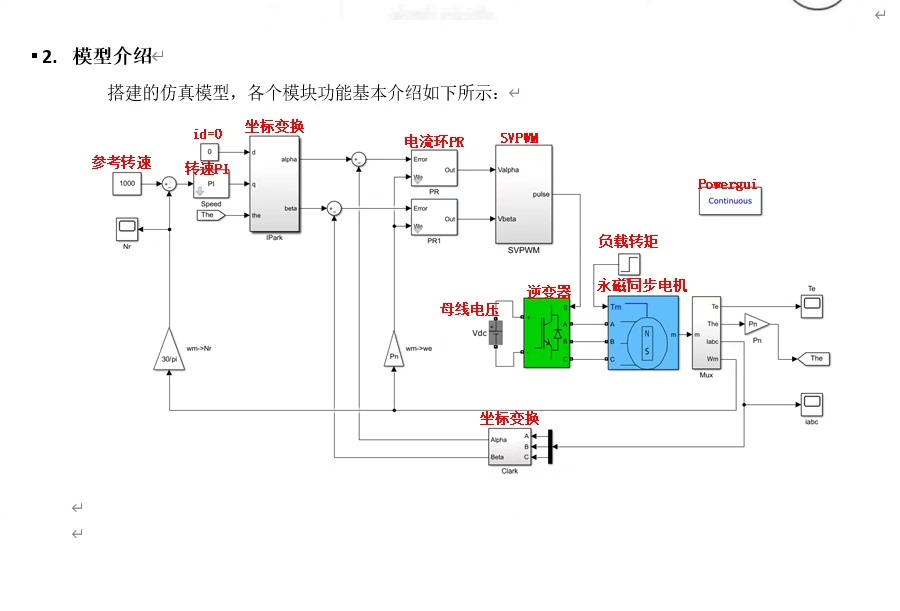
在电机控制领域,永磁同步电机(PMSM)因其高效、高功率密度等优点,广泛应用于工业、汽车等众多领域。今天咱就来讲讲在静止坐标系下,PMSM 的矢量控制,以及基于此的比例谐振控制(PR)在 Simulink 中的仿真实现。
主要模块介绍
逆变器
逆变器在整个系统里起着关键作用,它将直流电源转换为三相交流电源,给 PMSM 供电。在 Simulink 中,我们可以使用“Power Electronics Blockset”里的“Three - Phase Voltage Source Inverter”模块。代码角度来看,虽然 Simulink 是图形化建模,但背后也是有代码逻辑支撑的。这个逆变器模块,会根据输入的控制信号,按照特定的算法(比如脉宽调制算法)来控制开关器件的通断,从而输出期望的三相交流电压。
% 虽然 Simulink 图形化为主,但理解背后代码逻辑有助于深入掌握
% 假设简单逆变器控制逻辑(伪代码示意)
function output_voltage = inverter_control(dc_voltage, control_signals)
% 根据控制信号生成开关状态
switch_states = generate_switch_states(control_signals);
% 根据开关状态和直流电压生成三相交流输出电压
output_voltage = calculate_output_voltage(dc_voltage, switch_states);
end比例谐振控制(PR)
比例谐振控制器主要用于对特定频率的信号进行无静差跟踪和抑制。对于 PMSM 控制,我们希望能对电机电流中的基波分量进行精确控制。PR 控制器在静止坐标系下对交流信号有很好的控制效果。其传递函数一般可表示为:
\[
永磁同步电机比例谐振控制(PR)simulink仿真静止坐标系下的PMSM矢量控制。 主要模块:逆变器+PR+SVPWM等等。 控制附上各部分模块详细介绍及参考资料。 仿真模型仅用于学习交流使用。
G{PR}(s) = Kp + \frac{2Kr \omegac s}{s^2 + 2\omegac s + \omega0^2}
\]
其中,\(Kp\) 是比例系数,\(Kr\) 是谐振系数,\(\omegac\) 是截止频率,\(\omega0\) 是谐振频率。在 Simulink 中搭建 PR 控制器,可以用传递函数模块来实现上述公式。
% 假设在 Matlab 里实现简单 PR 控制器的离散化(简化示意)
omega0 = 2*pi*50; % 假设谐振频率 50Hz
omegac = 2*pi*1; % 截止频率
Kp = 0.5;
Kr = 10;
num = [2*Kr*omegac, 0];
den = [1, 2*omegac, omega0^2];
sys_PR = tf(num, den);
sys_discrete_PR = c2d(sys_PR, 0.001, 'zoh'); % 离散化,采样时间 0.001s这段代码首先定义了 PR 控制器的参数,然后根据传递函数公式创建了连续系统的传递函数 sys_PR,最后通过 c2d 函数将其离散化,以便在离散控制系统中使用。
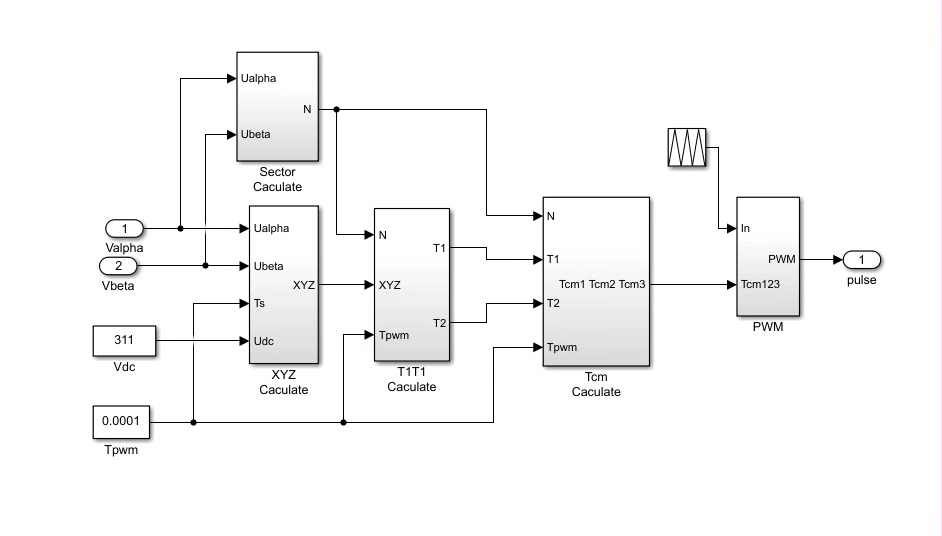
空间矢量脉宽调制(SVPWM)
SVPWM 是一种高效的脉宽调制技术,用于逆变器的控制。它通过控制逆变器开关状态的作用时间,合成期望的空间电压矢量,从而提高直流电压利用率,减少谐波。在 Simulink 中,可以自己搭建 SVPWM 模块,也可以使用一些已有库中的模块。以自行搭建为例,其基本步骤如下:
- 根据给定的三相电压参考值,计算合成的空间电压矢量。
- 判断该空间电压矢量所在的扇区。
- 计算每个开关状态的作用时间。
% 简单 SVPWM 算法实现(部分关键代码示意)
function [t1, t2, t0] = svpwm_calculation(Vref)
% 计算 Vref 的幅值和角度
magnitude = norm(Vref);
angle = atan2(Vref(2), Vref(1));
% 判断扇区
sector = determine_sector(angle);
% 根据扇区计算开关状态作用时间
if sector == 1
t1 = T * magnitude * sin(pi/3 - angle) / Vdc;
t2 = T * magnitude * sin(angle) / Vdc;
t0 = T - t1 - t2;
% 其他扇区类似计算...
end
end上述代码只是 SVPWM 算法中的关键部分,实际完整实现还需要更多的逻辑和处理。
参考资料
- 《永磁同步电机调速系统控制技术》,这本书对 PMSM 的矢量控制原理、PR 控制等都有详细的理论阐述和案例分析,是深入学习的好帮手。
- MathWorks 官方文档,关于 Simulink 中各种电机控制模块以及电力电子模块的使用说明,能让你快速上手搭建仿真模型。
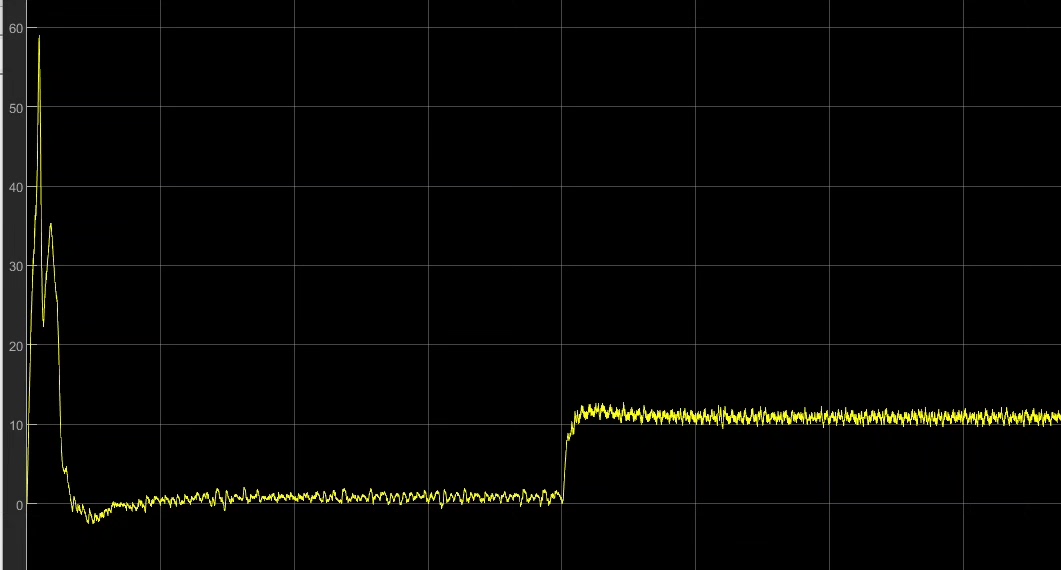
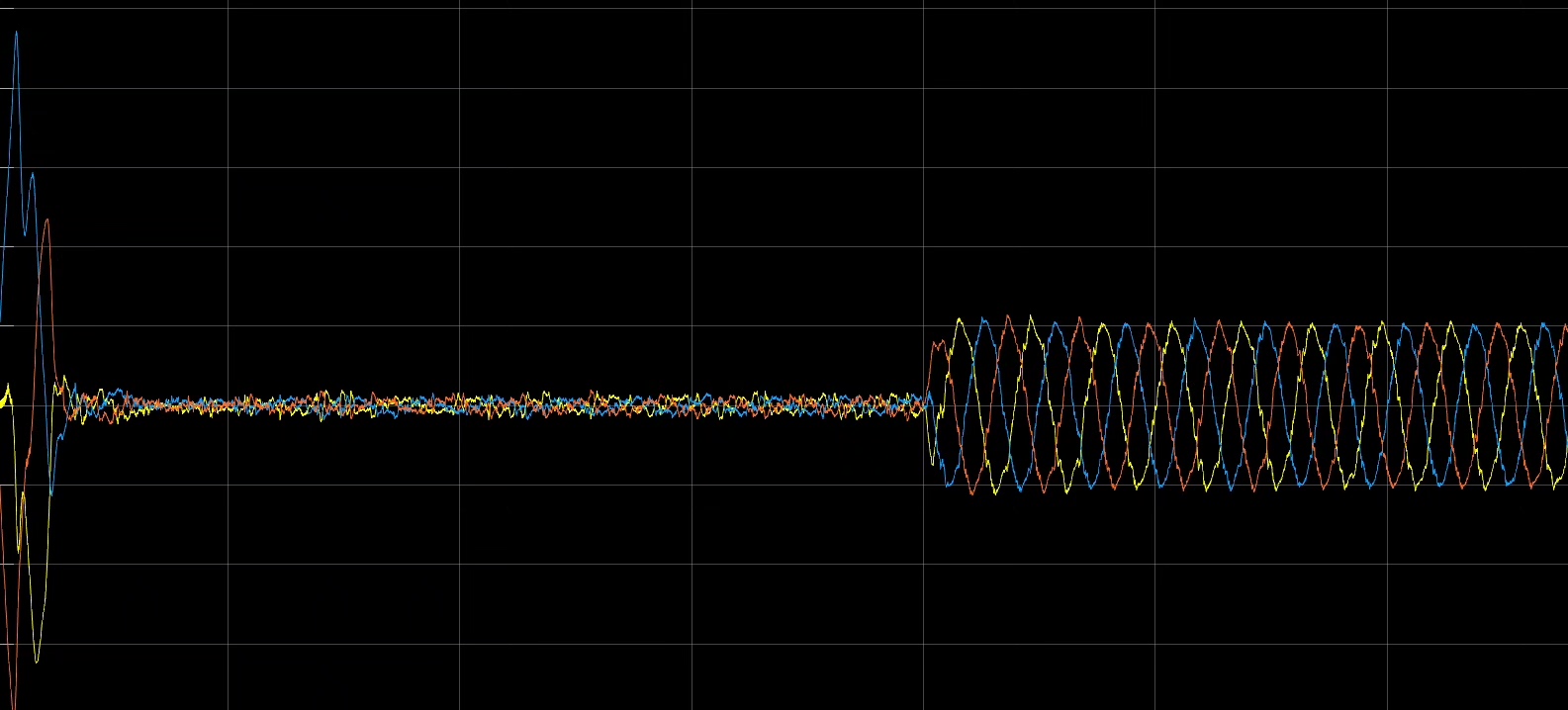
最后要强调的是,本次分享的仿真模型仅用于学习交流使用,希望大家能通过这个模型,对静止坐标系下 PMSM 的矢量控制和 PR 控制有更深入的理解。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 9
9 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)