商用两轮平衡车量产源码方案大揭秘
商用两轮平衡车量产源码方案 源码及方案 一经发出,概不退换~ 可以用于量产~ 可以直接免修改将主板改成无刷电机控制器~ 可加遥控~ 得此源码
嘿,各位技术爱好者们!今天来聊聊超酷的商用两轮平衡车量产源码方案,这可是个好东西,一旦拥有,说不定就能在平衡车市场闯出一片天呢!
源码及方案特性
首先得说,这个源码方案一旦发出,就概不退换啦,不过想想也是,毕竟这可是能直接用于量产的宝贝,背后凝结了不少技术心血。
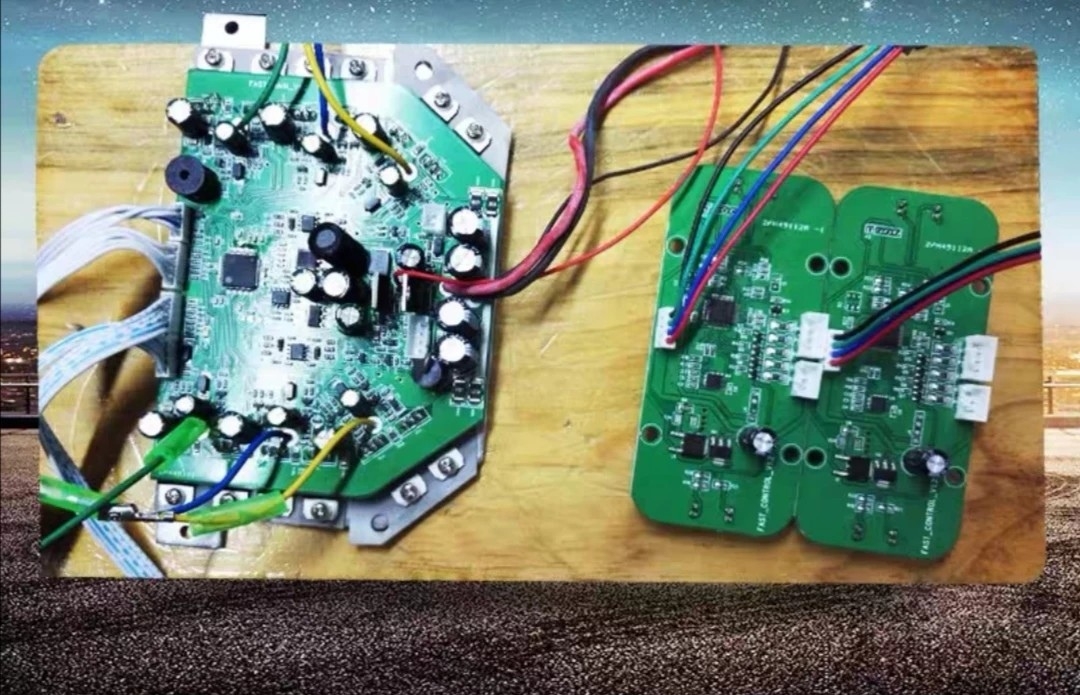
轻松改造主板为无刷电机控制器
这源码厉害的地方在于,可以直接免修改把主板改成无刷电机控制器。在代码层面,这里涉及到对底层硬件控制的一些关键代码。比如在电机驱动部分,假设我们使用的是 C 语言来编写代码,可能会有这样一段初始化无刷电机的代码:
// 定义电机控制引脚
#define IN1_PIN 2
#define IN2_PIN 3
#define IN3_PIN 4
#define IN4_PIN 5
// 初始化无刷电机
void initBrushlessMotor() {
pinMode(IN1_PIN, OUTPUT);
pinMode(IN2_PIN, OUTPUT);
pinMode(IN3_PIN, OUTPUT);
pinMode(IN4_PIN, OUTPUT);
// 这里还可能会有一些设置电机初始速度、方向等的代码
}这段代码就是简单地定义了无刷电机控制所需要的引脚,并将这些引脚设置为输出模式,为后续控制电机的运转做好准备。通过这样简洁的代码设置,就能轻松实现主板向无刷电机控制器的转变,是不是很神奇?
可加遥控功能
另外,这个方案还支持加遥控。从代码角度看,遥控功能的实现往往需要处理无线通信部分。以常见的蓝牙遥控为例,可能会用到蓝牙通信库。假设用 Arduino 平台开发,代码可能是这样的:
#include <SoftwareSerial.h>
// 定义蓝牙模块引脚
SoftwareSerial bluetooth(10, 11); // RX, TX
void setup() {
Serial.begin(9600);
bluetooth.begin(9600);
}
void loop() {
if (bluetooth.available()) {
char command = bluetooth.read();
// 根据接收到的指令执行相应动作,比如控制平衡车前进、后退、转向等
if (command == 'F') {
// 这里添加平衡车前进的代码
} else if (command == 'B') {
// 平衡车后退代码
}
}
}这段代码通过 SoftwareSerial 库来模拟串口通信与蓝牙模块交互。在 setup 函数中初始化串口和蓝牙模块通信,loop 函数里不断检查蓝牙模块是否有数据传来,如果有就读取指令并根据指令执行平衡车相应的动作。通过这样的代码实现,就能轻松为平衡车添加遥控功能啦。
得此源码,就相当于拿到了开启商用两轮平衡车量产大门的钥匙,无论是想在平衡车领域大展身手的创业者,还是单纯热爱技术想深入研究的小伙伴,都不容错过哦!希望大家都能利用这个源码方案,创造出超酷的两轮平衡车产品。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 9
9 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)