自动驾驶控制:动力学跟踪误差模型MPC算法路径跟踪仿真探索
自动驾驶控制-动力学跟踪误差模型MPC算法路径跟踪仿真 matlab与simulink联合仿真,动力学跟踪误差模型实现的MPC横向控制,可以跟踪双移线,圆形,五次多项式,以及各种自定义道路,实现横纵向解耦,相比运动学mpc更实用。 跟踪效果完美。 模型可以提供前轮转向/后轮转向/四轮转向三种模型,多套模型打包有优惠。 有两个版本的代码,一个没有考虑模型的干扰项C矩阵,一个考虑了,考虑C矩阵
在自动驾驶领域,路径跟踪是关键技术之一。今天咱们来聊聊基于动力学跟踪误差模型的MPC算法路径跟踪仿真,还涉及到Matlab与Simulink的联合仿真,超有意思。
一、动力学跟踪误差模型MPC横向控制的魅力
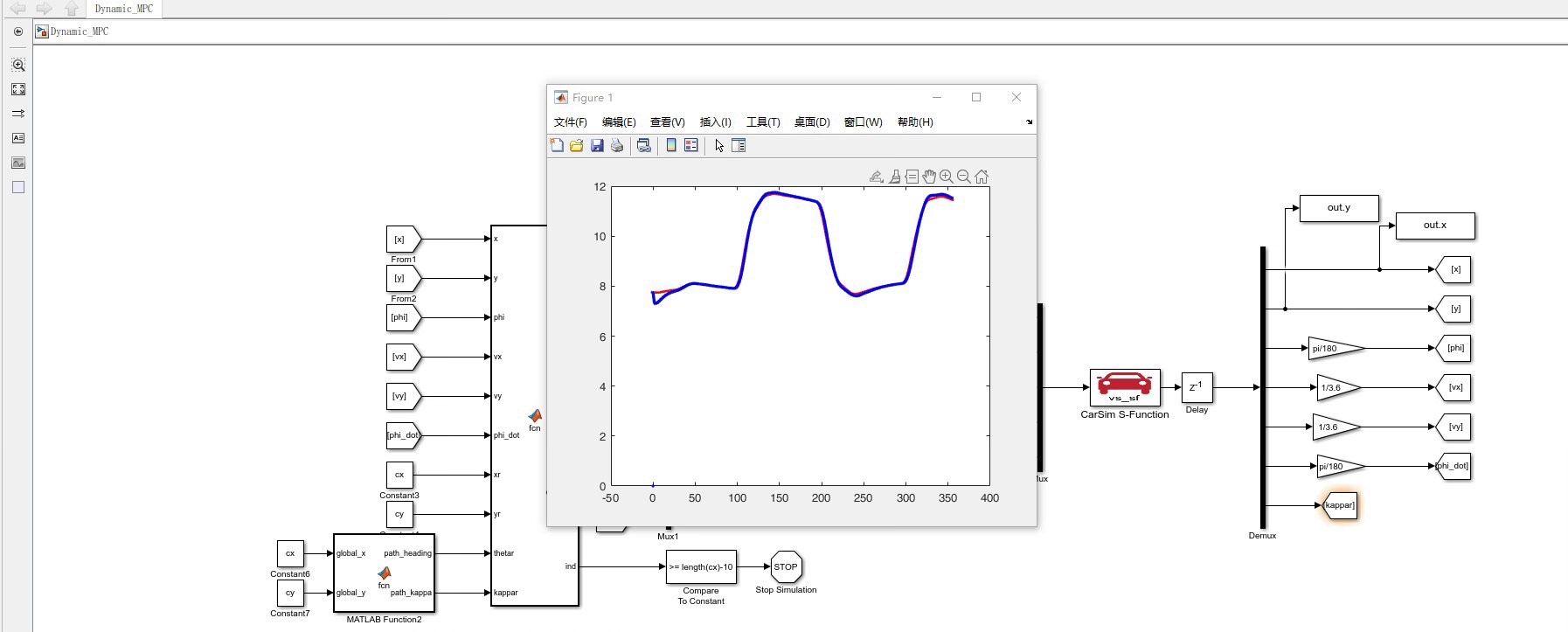
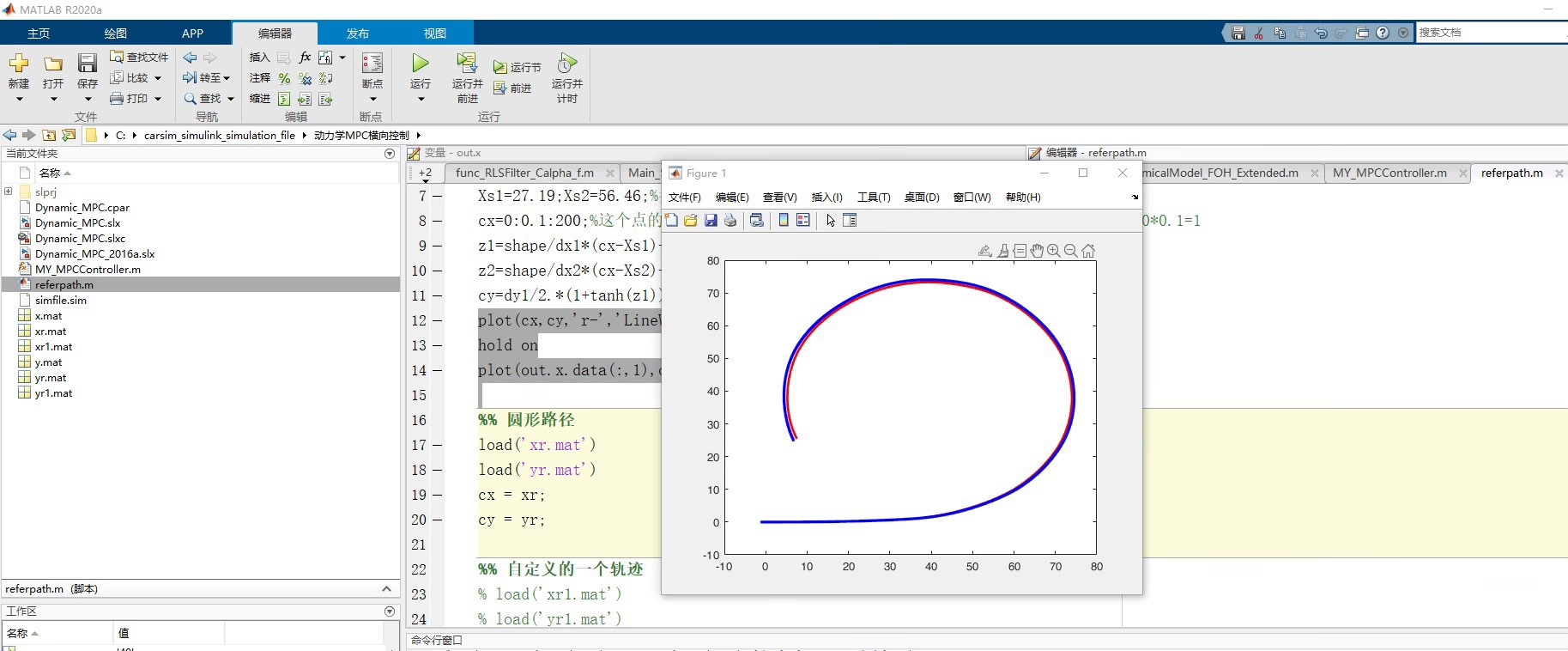
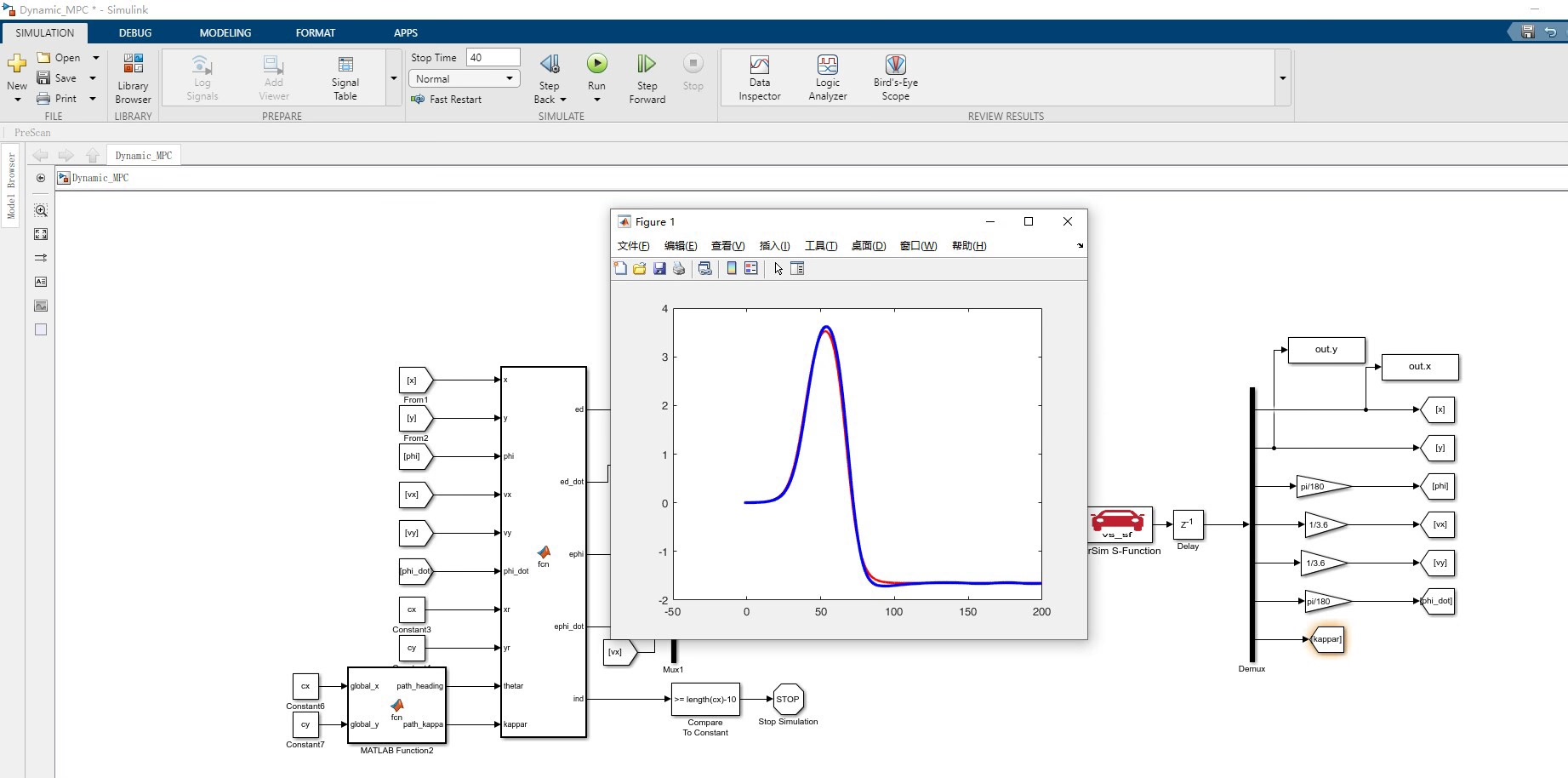
动力学跟踪误差模型实现的MPC横向控制,可不是吃素的。它厉害在能够跟踪双移线、圆形、五次多项式以及各种自定义道路,这适应性简直杠杠的。而且它还实现了横纵向解耦,相比运动学MPC,在实际应用中更具实用性,最终呈现出的跟踪效果堪称完美。
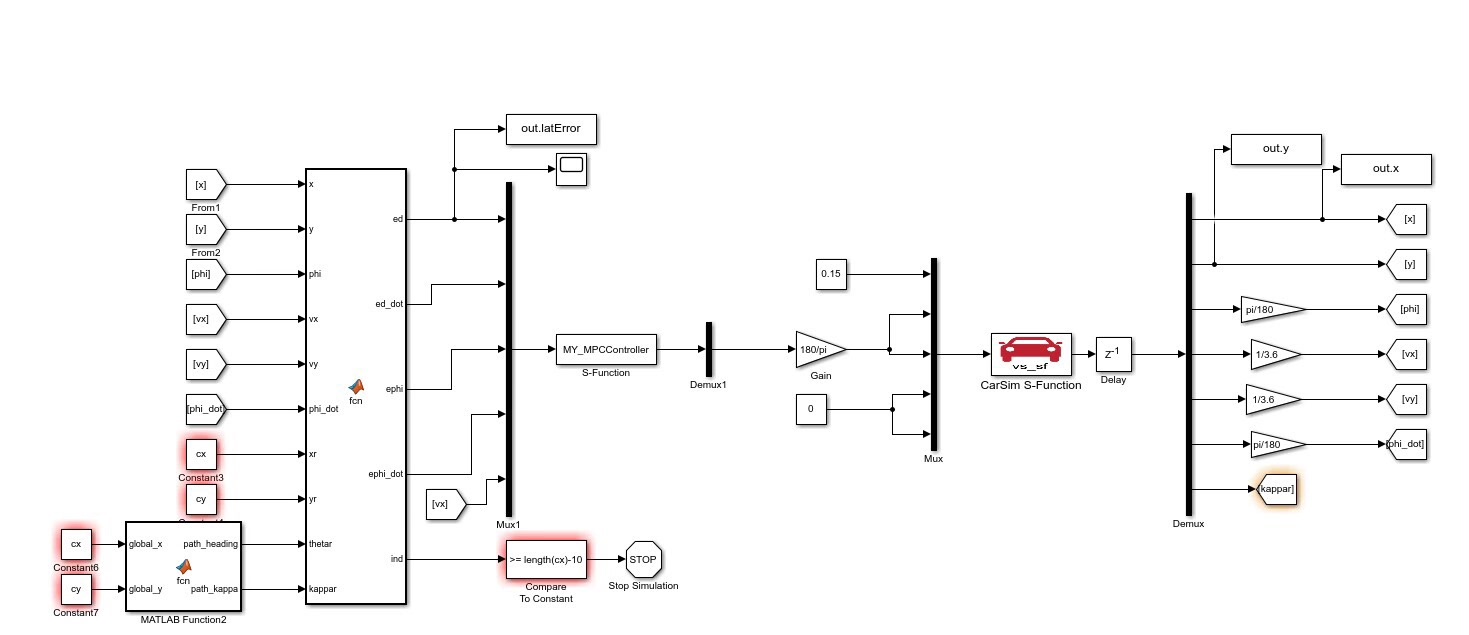
二、Matlab与Simulink联合仿真
Matlab和Simulink联合起来,那就是仿真界的“王炸”组合。在这个项目里,通过它们俩的配合,能将动力学跟踪误差模型MPC算法的优势发挥得淋漓尽致。咱们可以在Matlab里编写核心的算法代码,比如MPC的参数设置、目标函数的定义等。
% 定义MPC参数
Np = 10; % 预测时域
Nu = 2; % 控制时域
Q = [10 0; 0 1]; % 状态权重矩阵
R = 0.1; % 控制输入权重矩阵
mpcobj = mpc(Q,R,Np,Nu);这段代码简单定义了MPC的一些基本参数,预测时域 Np 决定了我们往后看多远来预测系统状态,控制时域 Nu 表示控制输入在多少步内进行优化。状态权重矩阵 Q 和控制输入权重矩阵 R 则平衡了对状态跟踪精度和控制输入变化幅度的要求。
然后在Simulink里搭建系统的模型架构,将车辆的动力学模型、路径生成模块以及MPC控制器等有机结合起来。通过这种联合仿真方式,能更直观、准确地看到整个路径跟踪系统的运行情况。
三、多转向模型的优势
这里提供了前轮转向、后轮转向、四轮转向三种模型,这可太贴心了。不同的转向模型适用于不同的场景和车辆类型。比如前轮转向模型在一般的乘用车上应用广泛,后轮转向在一些特殊的工业车辆或者高性能跑车上能发挥独特优势,四轮转向则能提供更灵活、更精准的转向控制。
自动驾驶控制-动力学跟踪误差模型MPC算法路径跟踪仿真 matlab与simulink联合仿真,动力学跟踪误差模型实现的MPC横向控制,可以跟踪双移线,圆形,五次多项式,以及各种自定义道路,实现横纵向解耦,相比运动学mpc更实用。 跟踪效果完美。 模型可以提供前轮转向/后轮转向/四轮转向三种模型,多套模型打包有优惠。 有两个版本的代码,一个没有考虑模型的干扰项C矩阵,一个考虑了,考虑C矩阵
想象一下,要是把这多套模型打包,不仅在功能上更全面,还能享受优惠,对于开发者和研究人员来说,简直是性价比之选。
四、考虑干扰项C矩阵的代码版本差异
项目中有两个版本的代码,一个没考虑模型的干扰项C矩阵,另一个考虑了。咱们先看看没考虑C矩阵时的状态空间模型部分代码。
% 不考虑C矩阵的状态空间模型
A = [0 1; 0 0];
B = [0; 1];
sys = ss(A,B,[1 0],0);这里简单构建了一个状态空间模型, A 矩阵描述了系统状态的变化, B 矩阵则体现了控制输入对系统状态的影响。
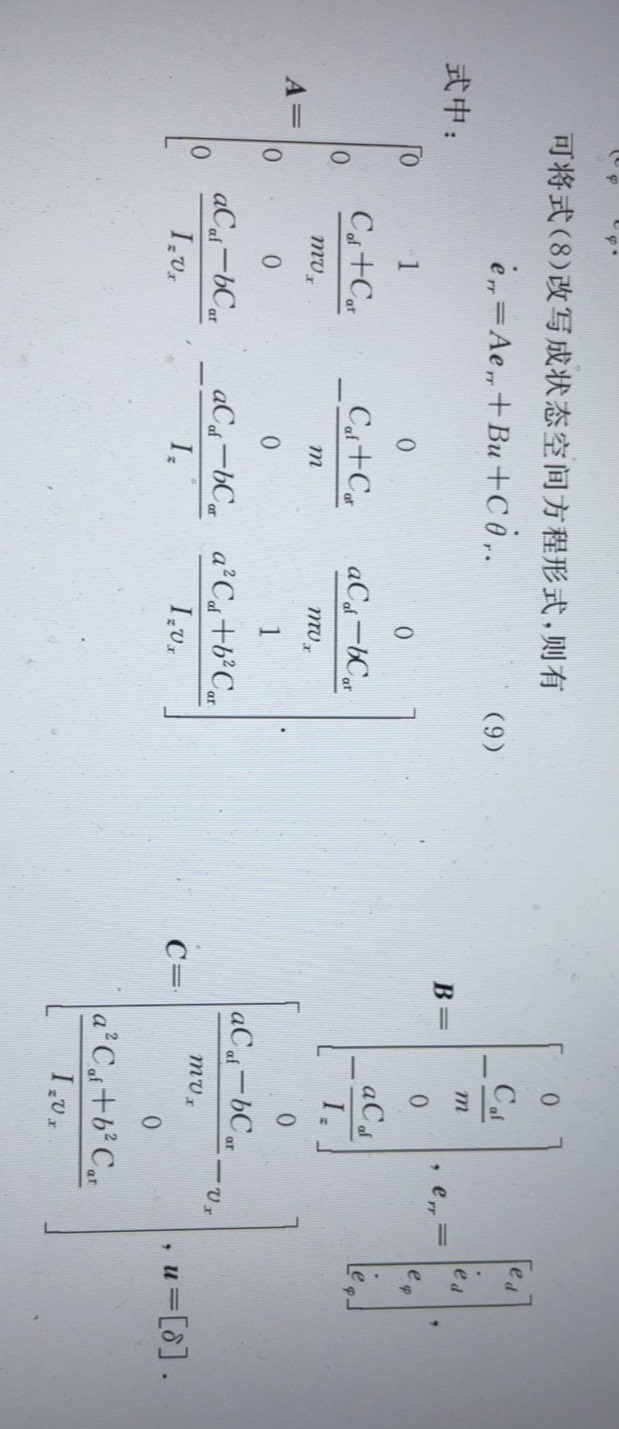
而考虑C矩阵的版本,代码如下:
% 考虑C矩阵的状态空间模型
A = [0 1; 0 0];
B = [0; 1];
C = [0.1 0]; % 干扰项C矩阵
sys = ss(A,B,C,0);这里多了个 C 矩阵,它描述了干扰对系统输出的影响。在实际的自动驾驶场景中,车辆会受到各种外界干扰,考虑C矩阵能让模型更加贴近真实情况,虽然增加了模型的复杂度,但能大大提高控制算法的鲁棒性和准确性。
总之,基于动力学跟踪误差模型的MPC算法路径跟踪仿真,结合Matlab与Simulink联合仿真,再加上多转向模型以及考虑干扰项的不同代码版本,为自动驾驶路径跟踪技术的研究和开发提供了丰富且实用的资源。无论是科研探索还是工程应用,都有很大的参考价值。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 4
4 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)