7自由度整车模型动力学研究与模拟应用:深化解析汽车行驶中的运动学特性与动力响应规律
·
7自由度整车模型动力学模型
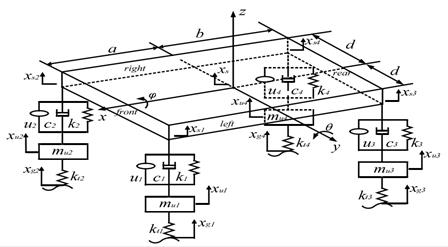
踩下油门的瞬间车身微微下沉,转向时悬挂系统像芭蕾舞演员的肌肉般绷紧。今天我们玩点硬核的——用Python搭建能模拟这些细节的7自由度整车模型。别被自由度吓到,其实就是把车辆拆成车身垂荡(上下)、侧倾(左右倾斜)、横摆(转向旋转)四个车轮各自的垂直跳动,总共七个运动维度。
先来点直观感受,看看悬架系统怎么在代码里蹦迪:
class Suspension:
def __init__(self, k=25000, c=1500):
self.k = k # 悬架刚度 N/m
self.c = c # 阻尼系数 N·s/m
def force(self, displacement, velocity):
return -self.k * displacement - self.c * velocity这个类就像悬架的DNA,刚度k决定了弹簧有多硬,阻尼c控制着减震器回弹速度。当车轮压过坑洼时,displacement是弹簧压缩量,velocity是压缩速度,输出的力直接影响车身姿态。
接下来构建核心动力学方程,这里用矩阵形式更带感:
import numpy as np
def vehicle_dynamics(t, states):
m_sprung = 1200 # 簧载质量
I_roll = 450 # 侧倾转动惯量
I_yaw = 2000 # 横摆转动惯量
# 组装质量矩阵
M = np.diag([m_sprung, I_roll, I_yaw, 40, 40, 40, 40]) # 最后四个是车轮质量
# 构造刚度矩阵(简化版)
K = np.zeros((7,7))
K[0,0] = 4*25000 # 四个悬架刚度总和
K[1,1] = 25000*1.5**2*2 # 悬架横向间距1.5m
# 阻尼矩阵同理
# ...
# 求解加速度
acceleration = np.linalg.solve(M, -K @ states)
return acceleration质量矩阵M对角线上的数值就像七个运动方向的"惯性阻力",刚度矩阵K的非零项揭示了悬架系统如何耦合不同自由度。注意K[1,1]里的1.5m是轮距一半,平方后体现侧倾刚度与轮距的关系。
用Scipy求解微分方程时会出现有趣的现象:
from scipy.integrate import solve_ivp
# 模拟紧急变道工况
result = solve_ivp(vehicle_dynamics, [0, 5],
[0, 0, 0, 0, 0, 0, 0], # 初始状态全为零
method='RK45',
events=jump_event) # 可添加车轮离地事件当给初始横摆角速度一个扰动时,解算器会自动处理各自由度间的能量传递。曾有个bug让我调了三天——忘记车轮质量单位换算,导致求解器步长失控,数值解像脱缰野马般发散。
最后来个炫酷的可视化:
import matplotlib.pyplot as plt
plt.figure(figsize=(10,6))
plt.plot(result.t, result.y[1]*180/np.pi, label='侧倾角')
plt.plot(result.t, result.y[3], '--', label='左前轮位移')
plt.title('麋鹿测试模拟')
plt.legend()
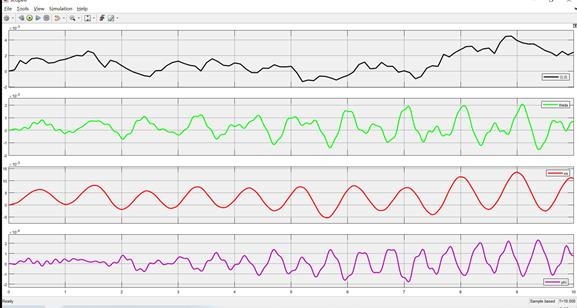
plt.show()运行后会看到侧倾角如何随着车轮位移变化,就像观看车辆在虚拟空间跳机械舞。那些波峰波谷里藏着悬架调校的秘密——阻尼系数增大10%,车身回正速度会加快但可能牺牲舒适性。
这个模型虽然比游戏引擎的简化版复杂,但比专业仿真软件更透明。下次调参时可以大胆尝试:把前悬刚度提高20%,后悬阻尼降低15%,看看会不会让车辆入弯更敏捷。毕竟在代码世界里,翻车也只是堆栈溢出而已。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 6
6 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)