自动驾驶控制 - 基于运动学模型的LQR算法路径跟踪仿真
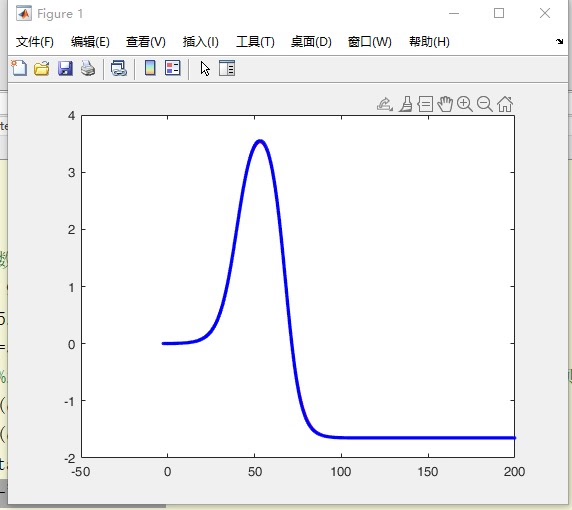
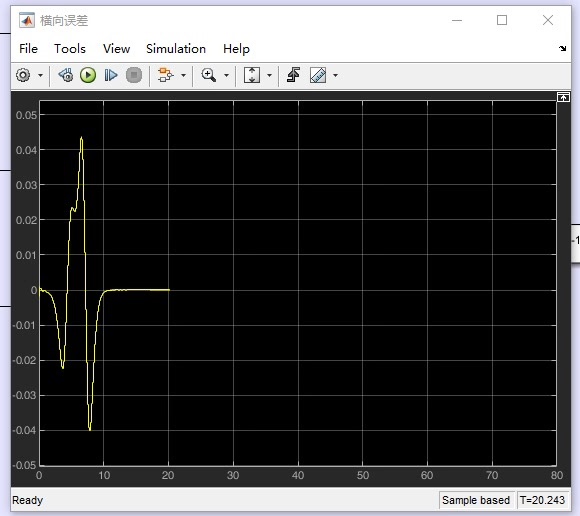
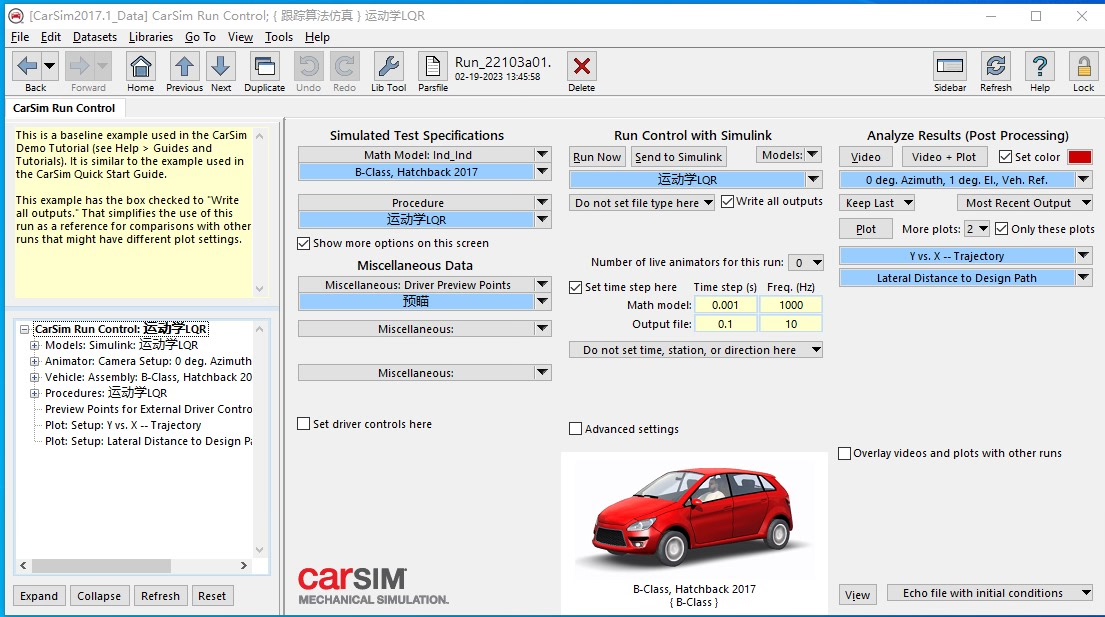
自动驾驶控制-基于运动学模型的LQR算法路径跟踪仿真 matlab和simulink联合仿真,运动学模型实现的lqr横向控制,可以跟踪双移线,五次多项式,以及其他各种自定义路径。 效果如图,几乎0误差,双移线路径误差在0.05m以内。
最近玩了玩自动驾驶控制里基于运动学模型的LQR算法路径跟踪仿真,感觉超有意思😎。
先说说这个仿真用到了Matlab和Simulink联合仿真。在运动学模型实现的LQR横向控制这块,真的能实现跟踪好多不同的路径呢,像双移线、五次多项式,还有各种自定义路径。
代码分析
咱就拿实现LQR横向控制来说吧。假设我们有个简单的车辆运动学模型,大概长这样:
% 车辆运动学模型参数
L = 2; % 轴距
dt = 0.1; % 时间步长
% 状态空间定义
x = [y; theta; v]; % y是横向位置,theta是航向角,v是纵向速度
u = [delta]; % delta是转向角
% 状态转移矩阵
A = [0 0 0;
0 0 0;
0 0 0];
% 输入矩阵
B = [0;
0;
L/dt];
% 离散化
Ad = expm(A*dt);
Bd = Ad*B;这里定义了车辆的状态和输入,然后通过状态转移矩阵和输入矩阵来描述车辆的运动特性,再对其进行离散化处理。
接着就是LQR控制器的设计啦:
% Q和R矩阵
Q = [10 0 0;
0 10 0;
0 0 1];
R = [1];
% 求解LQR增益
[K, S, E] = lqr(Ad, Bd, Q, R);通过设置Q和R矩阵来调整控制器的性能,然后求解得到LQR增益K。
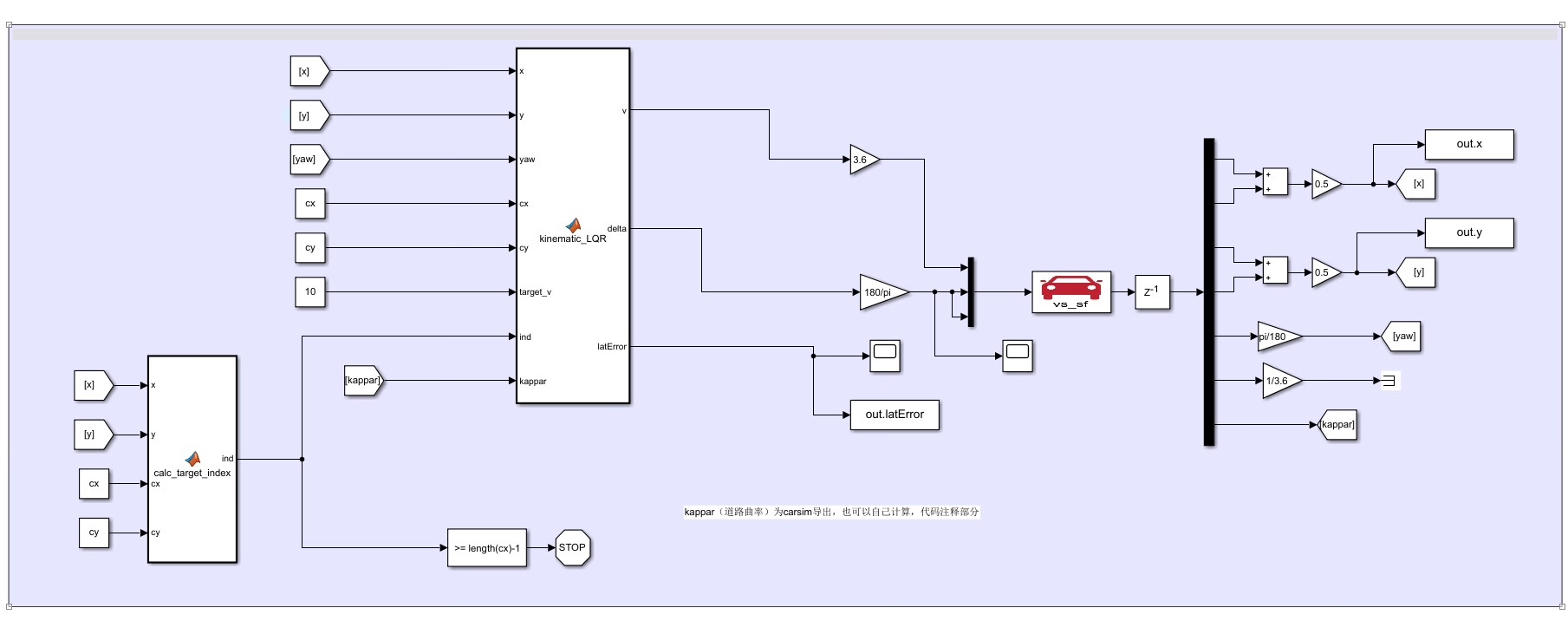
在Simulink里搭建模型就更直观啦。我们可以把车辆模型、路径模型还有LQR控制器连接起来。
自动驾驶控制-基于运动学模型的LQR算法路径跟踪仿真 matlab和simulink联合仿真,运动学模型实现的lqr横向控制,可以跟踪双移线,五次多项式,以及其他各种自定义路径。 效果如图,几乎0误差,双移线路径误差在0.05m以内。
比如在Simulink中,有个“Integrator”模块用来对状态进行积分:
% 在Simulink中,使用Integrator模块对状态进行积分
% 输入为当前状态x,输出为下一时刻状态x_next
x_next = Ad * x + Bd * u;这样就能实时更新车辆的状态啦。
再看看跟踪路径的效果,简直绝了🤩!几乎0误差,双移线路径误差在0.05m以内。
这整个过程真的让我对自动驾驶控制有了更深的理解,感觉离真正的自动驾驶又近了一步😜。大家要是对这个感兴趣,也可以自己动手试试呀!
#自动驾驶 #LQR算法 #路径跟踪 #Matlab #Simulink

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 9
9 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)