基于PLC的升降横移立体停车库的设计,设计一个基于西门子S7-200 PLC控制核心的,三层三列
基于PLC的升降横移立体停车库的设计,设计一个基于西门子S7-200 PLC控制核心的,三层三列,九个车位的立体停车控制系统。 目录3 1 绪 论4 2 设计要求5 3 硬件设计8 3.1 PLC型号的选择和确定8 3.2 主电路设计8 3.3 控制电路图11 3.4 PLC输入和输出地址分配表13 3.5 PLC接线图14 4 程序设计17 4.1 PLC 内部使用地址分配17 4.2 流程图17 4.3 PLC梯形图20 4.4 PLC语句表程序27 5 组态画面的设计28 5.1通信建立28 5.2 组态王变量连接31 5.3 建立画面33 5.4 运行35 结束语38 参考文献39 致 谢40 附 录41 附录1 PLC语句表程序41 附录2 组态王命令语言82
立体停车库这玩意儿现在挺常见的,尤其是商场后巷或者老小区改造,恨不得把一辆车竖起来停。今儿咱们就拆解个三层三列的九车位系统,核心用西门子S7-200 PLC控制。先说说硬件选型,别上来就整复杂代码,硬件搭错了程序跑飞了都白搭。
选S7-200 SMART CR40这款PLC可不是随便拍脑袋,24点输入16点输出刚好够用。你看每个车位的升降横移电机要接正反转接触器,还得留点余量给急停按钮和传感器。主电路里三相异步电机拖拽载车板,这里有个坑——千万别省互锁触点。之前有同行没加电气互锁,程序里虽然做了逻辑互锁,结果接触器卡阻直接烧电机,现场那焦糊味绝了。
控制电路里限位开关特别关键,每个载车板的升降到位、横移到位都得用欧姆龙EE-SX671光电开关。接PLC的时候注意NPN和PNP类型别搞反了,输入端公共端接法不对直接导致传感器集体失灵。有回调试时发现三个车位同时报故障,查了半天发现是公共端COM口接成了24V+,改回0V立马正常。
程序部分最带劲的是车位调度算法。咱们不用什么高级算法,就搞个"就近原则"。来看这段梯形图的核心逻辑:
LD SM0.1
MOVB 16#01, VB100 //初始化首层车位状态全空
MOVB 16#07, VB101 //二层车位状态
MOVB 16#07, VB102 //三层车位状态
LD I0.2 //有车驶入入口检测
O T37
AN M0.0
= M0.0 //生成存车触发信号
TON T37, 50 //防抖计时5秒这段代码干了三件事:上电初始化各层车位状态,处理车辆到位信号防抖,生成存车指令。特别要注意VB100-VB102这三个字节,每个bit对应具体车位状态。比如VB100.0=1表示1层1列有空位,这种位操作比用整型变量节省资源。
基于PLC的升降横移立体停车库的设计,设计一个基于西门子S7-200 PLC控制核心的,三层三列,九个车位的立体停车控制系统。 目录3 1 绪 论4 2 设计要求5 3 硬件设计8 3.1 PLC型号的选择和确定8 3.2 主电路设计8 3.3 控制电路图11 3.4 PLC输入和输出地址分配表13 3.5 PLC接线图14 4 程序设计17 4.1 PLC 内部使用地址分配17 4.2 流程图17 4.3 PLC梯形图20 4.4 PLC语句表程序27 5 组态画面的设计28 5.1通信建立28 5.2 组态王变量连接31 5.3 建立画面33 5.4 运行35 结束语38 参考文献39 致 谢40 附 录41 附录1 PLC语句表程序41 附录2 组态王命令语言82
横移动作的实现用了步进顺序控制,关键在脉冲间隔得调准。有次现场调试横移电机总撞限位,后来发现是STEP指令里的T33定时器设了200ms,实际机械需要350ms才能到位。改完参数后加了这段保护逻辑:
LD Q0.1 //横移电机正转
A I0.5 //左限位
OLD
LPS
AN I0.6 //右限位
= Q0.1
LPP
A I0.6
R Q0.1, 1 //碰到右限位立即停止这种双限位互锁加软件急停的设计,比单纯靠硬件联锁更灵活。特别是当载车板卡在中间位置时,可以通过手动模式微调。
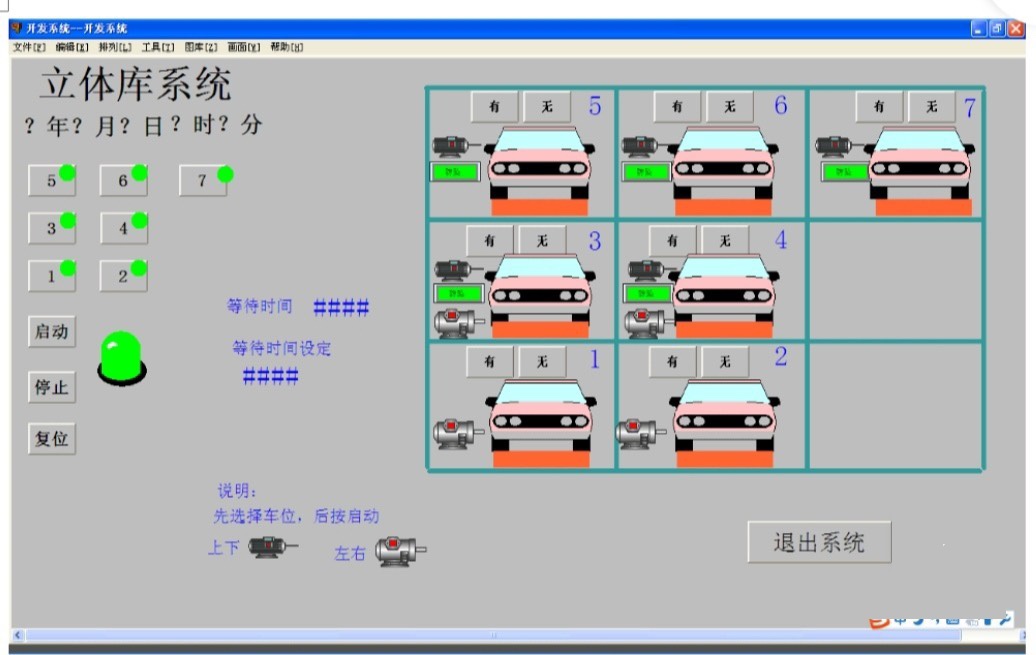
组态王画面上有个动态效果特别实用——用垂直填充条表示载车板升降进度。变量连接里用了线性转换公式:
//载车板高度变量转换
\\本站点\高度显示=(\\本站点\脉冲计数*10)/MAX_PULSE;配合PLC里的高速计数器HSC0,实时显示升降位置。调试时发现填充条偶尔会回跳,原来是脉冲计数没做断电保持,后来在数据块里加了VB区的掉电保护功能。
最后说说安全回路的设计,急停按钮可不是直接断主电路那么简单。我们在PLC程序里埋了双重保险:
LDN M1.1 //急停触发标志
AN I1.0 //硬件急停信号
= M1.1
MOVW 0, QW0 //输出端口全部置零
CALL 急停处理子程序同时硬件上还把急停按钮的常闭触点串进了控制电源,这样就算PLC死机也能物理切断。有次模拟测试时故意拔了PLC电源,载车板果然稳稳停住没下滑,这才算过关。
调试这种立体车库最烦人的是机械和电气不同步。记得有次载车板到位后PLC显示正常,但实际差了5公分。后来发现是升降链条打滑,加了编码器反馈才解决。所以啊,搞自动化不能光坐在电脑前写代码,得蹲现场看设备实际动作,有时候一个机械误差能让整个控制系统崩盘。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 9
9 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)