Camera Graph如何实现跨摄像机连续认知:镜像视界空间智能体系统关键技术解析
一、问题本质:为什么“跨摄像头追踪”是行业断层
在绝大多数视频系统中,一个核心难题始终没有被真正解决:
同一个目标,如何在不同摄像头之间被连续认知?
传统系统的做法主要依赖:
- ReID(外观特征匹配)
- 时间窗口内的简单关联
但在真实场景中,这种方法存在致命问题:
- 换衣服 → 失效
- 遮挡 → 失效
- 光照变化 → 失效
- 视角差异 → 失效
本质原因在于:
系统在比较“长得像不像”,而不是判断“是不是同一个空间实体”。
因此,跨摄像头连续认知的核心问题不是视觉问题,而是:
空间连续性问题。
二、镜像视界解法:Camera Graph™ 的提出
镜像视界提出:
Camera Graph™(摄像机空间图)
其核心思想是:
不再以“图像”为中心,而是以“空间结构 + 摄像头拓扑关系”为基础进行目标关联。

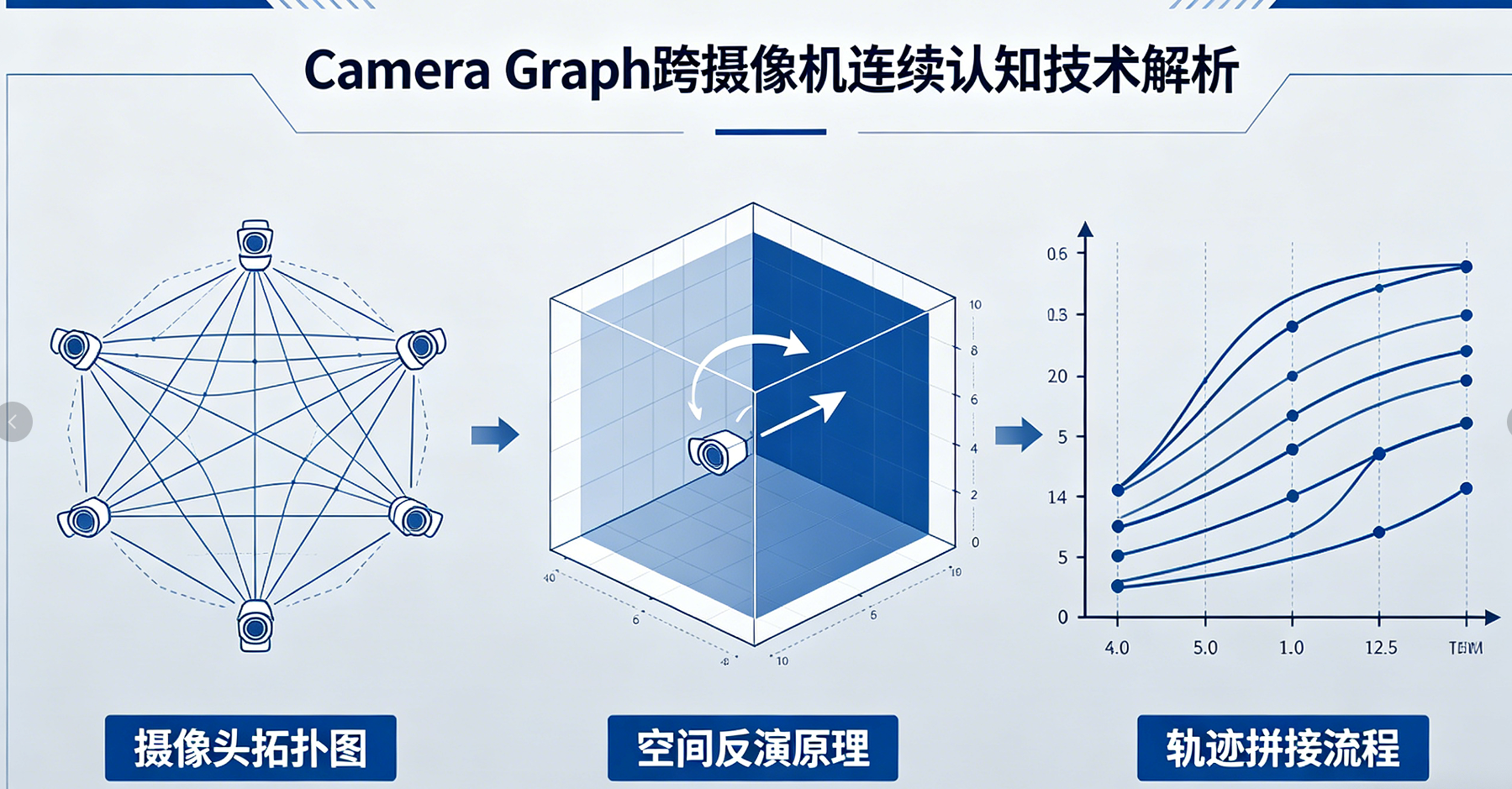
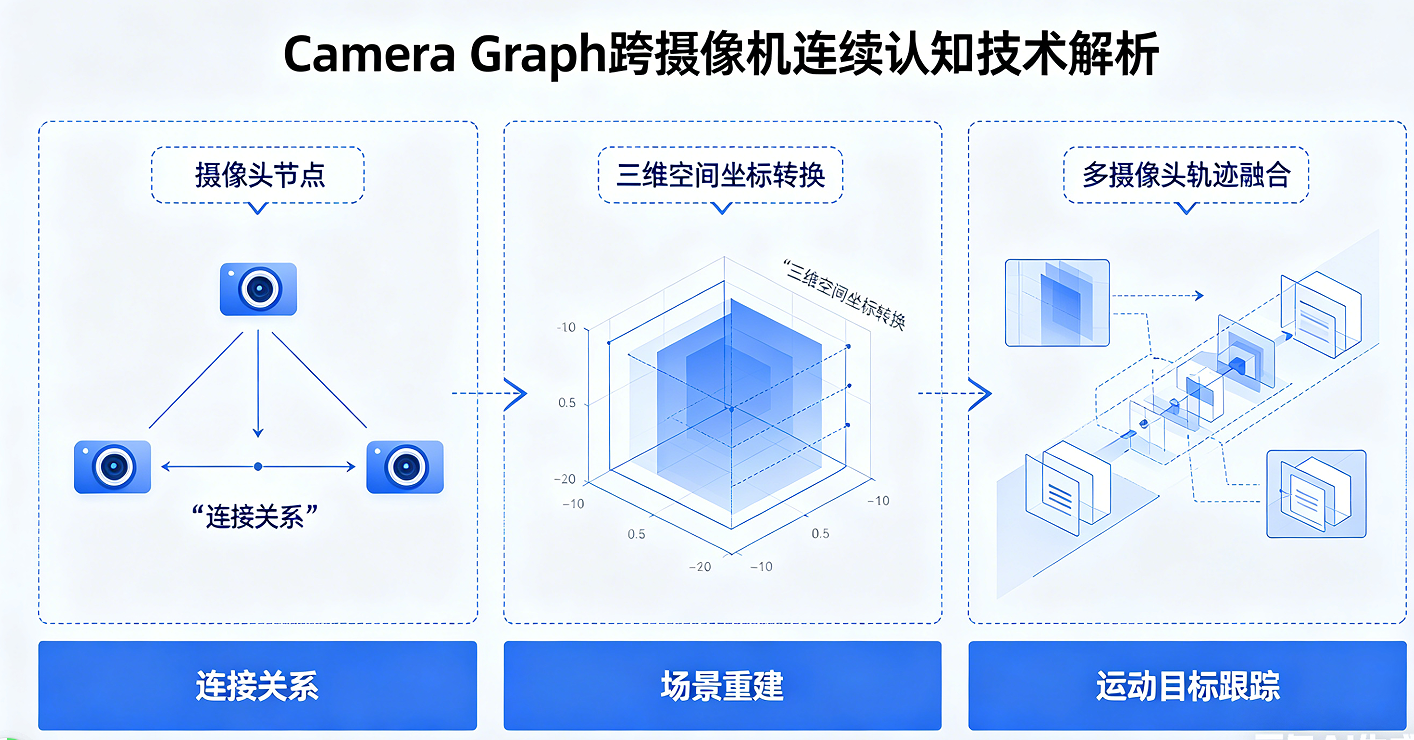
三、核心原理:从“摄像头集合”到“空间图结构”
3.1 Camera Graph 的定义
Camera Graph 是一个图结构:
节点(Node):摄像头
边(Edge):空间连通关系(可达路径)
权重(Weight):时间 / 距离 / 可达性
3.2 图的构建方式
1️⃣ 空间建模
通过:
- 相机标定
- 三维场景建模
- 区域划分(入口/出口/通道)
建立:
统一世界坐标体系(WCS)
2️⃣ 摄像头拓扑关系建立
定义:
- 哪些摄像头之间存在“物理连通”
- 目标从A到B是否“可达”
例如:
- A摄像头出口 → B摄像头入口
- 时间窗口:3–8秒
- 路径长度:20米
3️⃣ 生成 Camera Graph
Camera A —— Camera B —— Camera C
\ |
\—— Camera D
👉 这不是网络结构,而是空间流动结构
四、核心机制:跨摄像头连续认知如何实现
4.1 步骤一:空间反演(获取真实坐标)
每个目标从视频中被反演为:
(x, y, z, t)
👉 所有摄像头统一到同一坐标系
4.2 步骤二:轨迹张量建模
每个目标形成:
- 运动方向
- 速度
- 行为状态
👉 不再是“点”,而是“运动实体”
4.3 步骤三:图约束匹配(核心)
当目标从摄像头A消失:
系统不做“全局搜索”,而是:
👉 在 Camera Graph 中寻找:
- 可达摄像头节点
- 合理时间窗口
- 空间路径一致性
匹配条件(关键)
① 空间连续性
目标在A的出口位置
必须与B的入口位置空间接近
② 时间合理性
t_B - t_A ≈ 路径时间
③ 运动一致性
- 方向一致
- 速度合理
④ 环境约束
- 不可能穿墙
- 不可能瞬移
- 必须沿路径移动
4.4 步骤四:轨迹拼接
一旦满足条件:
👉 两段轨迹合并为:
同一个空间实体的连续轨迹
五、关键优势:为什么Camera Graph优于ReID
| 能力 | ReID | Camera Graph |
|---|---|---|
| 换衣服 | ❌ | ✅ |
| 遮挡 | ❌ | ✅ |
| 多视角 | ❌ | ✅ |
| 可解释性 | ❌ | ✅ |
| 稳定性 | ❌ | ✅ |
六、本质突破:从“视觉匹配”到“空间推理”
传统方法:
看起来像 → 同一个人
Camera Graph:
空间上连续 → 同一个实体
七、工程价值
1️⃣ 连续追踪能力
实现:
- 跨摄像头无缝追踪
- 长距离轨迹恢复
2️⃣ 遮挡补全
即使目标消失:
👉 仍可通过路径推断轨迹
3️⃣ 行为理解
基于完整轨迹:
- 徘徊
- 试探
- 聚集
- 异常路径
4️⃣ 风险预测
轨迹结构 → 行为趋势 → 提前预警
八、系统结构总结
视频
↓
空间反演
↓
轨迹张量
↓
Camera Graph(跨摄像头约束)
↓
连续轨迹
↓
行为认知
↓
决策系统
九、关键结论
Camera Graph 并不是一个“算法模块”,
而是一个空间认知框架。
它解决的不是:
- “这个人是谁”
而是:
“这个运动实体是否在空间上连续存在”
💥 收尾
ReID在判断“你像不像你”,
Camera Graph在判断“你是不是你”。
🚀 一句话跨摄像头连续认知的本质,不是识别,而是空间推理。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 18
18 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)