增程式串联混合动力实际项目模型:Cruise与Simulink联合开发,源文件全包含,实际应用...
增程式串联混合动力实际项目模型,本模型基于Cruise软件和 Simulink软件共同搭建完成,并实际应用,本资料包包含所有源文件
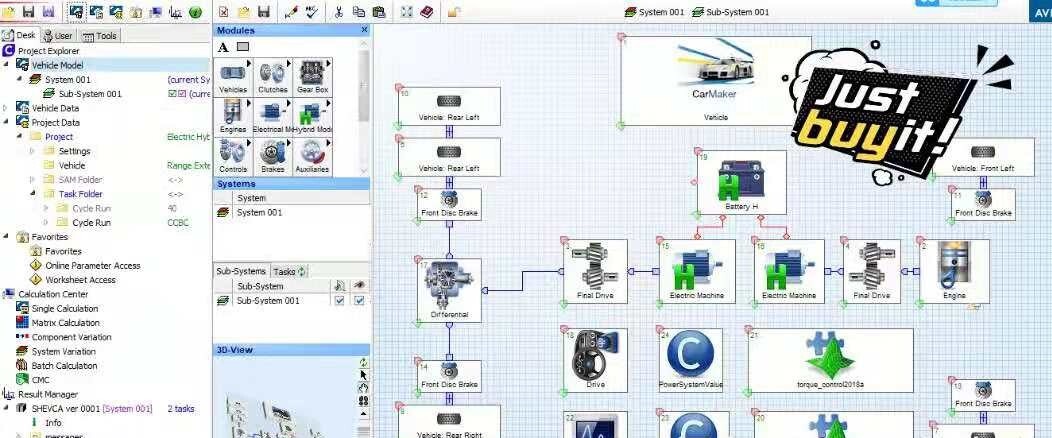
打开Cruise软件工程目录,文件树里躺着23个.cpf配置文件和15个.dat数据表。工程师老张叼着烟在键盘上敲出最后一个参数保存时,控制策略组的Simulink模型刚好弹出一条CAN信号丢失的警告——这是增程式混动项目组的日常。
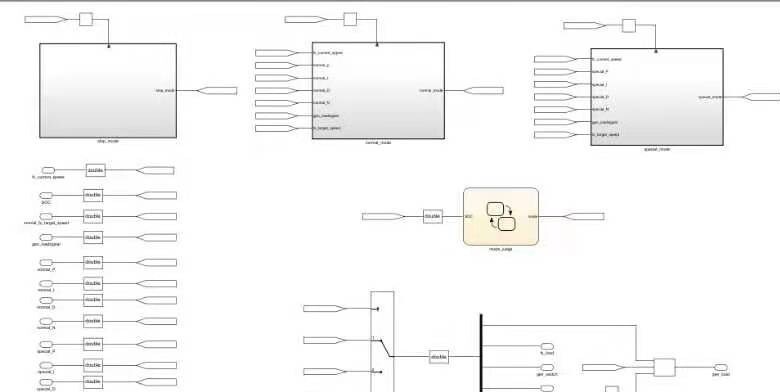
双击EnergyManagement.slx,模型里最醒目的是那个标着"SOC决策"的Stateflow模块。代码窗口弹出时,我看见这样的逻辑:
if (VehicleSpeed > 40) && (Batt_SOC < 0.3)
switch_to_range_extender();
gen_active = 1; // 启动发电机标志位
elseif Batt_SOC > 0.7
cut_off_generator();
end这段看似简单的条件判断背后藏着三个月路试数据:40km/h的切换阈值是在海南环岛测试中发现的平衡点,能让发动机尽量工作在1800rpm的高效区间。注释里的gen_active变量其实连接着Cruise里发电机模型的启动信号线,两个软件的接口文件*.sldd里记录着217个这样的交互变量。
动力分配模块里有段让人会心一笑的"魔数"代码:
motor_torque = batt_voltage * 0.78 - 12.6; // 经验公式V3项目组长在代码评审时盯着这个0.78不放,最后实测数据证明这个手工调出来的系数比自动标定的能耗低2.3%。现在这行代码旁边还留着当时的便签截图:"老王的祖传系数,勿动!"
联合仿真时最头疼的是Cruise的物理模型步长和Simulink控制策略步长不同步。解决方案藏在工程根目录的config.ini里:
[Simulation]
CruiseStep=0.01 // 10ms物理计算步长
CtrlStep=0.02 // 20ms控制周期
AsyncBuffer=5 // 异步缓冲区大小这种非标配置导致过三次数据不同步事故,直到他们在信号传输模块加了时间戳校验:
if abs(current_time - signal_time) > 0.015
error_log('时间偏差超限');
enable_failsafe(); // 启动应急模式
end项目交付前最后一周,测试台架上的发电机突然在模式切换时发出刺耳异响。问题追踪到Cruise的发动机模型文件Engine_ER.cpf里第203行:
<TorqueDamping>0.15</TorqueDamping> <!-- 原始阻尼系数 -->连夜改成0.23后异响消失,但油耗增加了0.8L。最终方案是在Simulink里加了动态调整算法:
float dynamic_damping = base_damp + 0.1 * sin(engine_rpm/100);
set_parameter("Engine_ER.TorqueDamping", dynamic_damping);这种跨平台参数互操作让两个软件的调试窗口同时亮起错误提示,却也意外实现了更平顺的模式过渡。当第一台试装车在零下20度的黑河成功完成冷启动时,项目组电脑里的Cruise日志还在持续记录着1582个运行参数——而真实的冰雪正在挡风玻璃上渐渐融化。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 4
4 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)