从一张棋盘格说起:我用 WPF + OpenCV 撸了一款相机标定工具
前段时间在做一个机器视觉相关的项目,第一步就是得把相机给"校准"了——也就是常说的相机标定(Camera Calibration)。如果你也做过类似的事情,应该知道这事儿说简单不简单:OpenCV 给了你 calibrateCamera 这么个函数,但怎么把它包装成一个真正好用、能出报告、能看误差分布的工具,中间还是有不少活要干的。
今天就把这个工具的源码完整拆开,跟大家聊聊我是怎么从零搭建这款相机标定桌面应用的。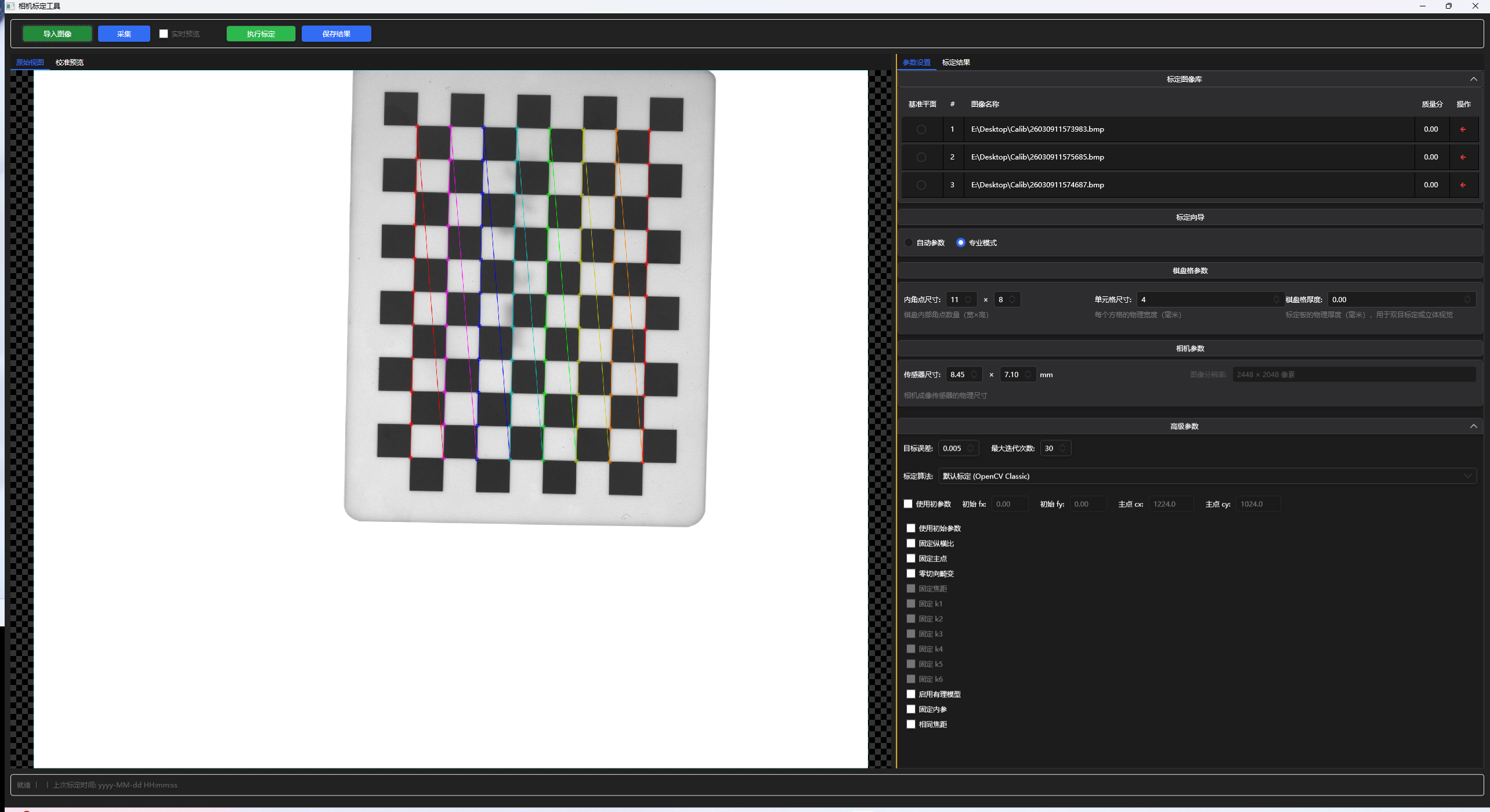
图1:工具主界面——左侧是图像预览区,右侧是参数配置面板,支持棋盘格参数、相机传感器参数和高级标定选项的完整配置
先说说为什么自己造轮子
市面上的标定工具不少,MATLAB 的 Camera Calibrator App 功能强大但笨重;ROS 自带的 camera_calibration 门槛又有点高;至于 OpenCV 官方示例……那基本就是个命令行脚本。我想要的是一个:
- 开箱即用的 Windows 桌面应用
- 能批量导入图片并自动筛选有效标定图
- 标定完成后给出完整的参数报告和可视化误差分析
- 支持畸变矫正预览,一眼就能看出效果
- 参数能持久化保存,下次打开接着用
于是就有了这个项目——技术栈选型也很直接:WPF 做 UI,OpenCvSharp4 做视觉算法,HandyControl 美化界面,OxyPlot 画图表。
项目结构一览
整个工程采用的是经典的 MVVM 模式,代码组织得很清晰:
CalibrationTool/
├── Views/ # 界面层
│ └── CalibrateTool.xaml # 主窗口(唯一的 Window)
├── ViewModels/ # 视图模型层
│ ├── CalibrateToolViewModel.cs # 核心 VM,几乎所有业务逻辑都在这里
│ └── RelayCommand.cs # 命令绑定基类(同步 / 异步)
├── Models/ # 数据模型层
│ ├── ObservableEntityBase.cs # INotifyPropertyChanged 基类
│ ├── CalibParameters.cs # 标定输入参数
│ ├── CalibrationResult.cs # 标定输出结果
│ ├── CalibImageObject.cs # 单张标定图像的数据对象
│ ├── CameraParamItem.cs # 相机参数项(含显示名格式化)
│ └── CalibrationFlagItem.cs # 标定标志位项
├── Services/ # 服务层
│ ├── CalibrationService.cs # ★ 标定核心算法封装
│ └── SerializeService.cs # XML 序列化(泛型单例缓存)
├── Helpers/ # 辅助工具
│ └── CalibrationHelper.cs # 工厂方法 & 工具函数
├── Controls/ # 自定义控件
│ └── CanvasViewer.xaml/cs # 可缩放/平移的图像查看器
└── Converters/ # 值转换器
└── Converters.cs # Bool→Visibility 等
一个值得注意的设计决策:ObservableEntityBase 作为所有 Model 的基类,提供了带 [CallerMemberName] 的 SetProperty<T> 方法——这意味着子类的属性变更通知可以写得非常简洁,不用每次手敲属性名字符串。这种模式在 MVVM 项目里算是标配了,但能坚持统一使用确实能让代码整洁很多。
标定流程:从导入到出报告
整个标定的数据流其实是一条清晰的管线,我来按步骤拆解。
第一步:图像加载与有效性筛选
用户点击「导入图像」后,触发 LoadImages 命令,弹出文件选择对话框支持多选。关键在于 LoadCalibrationImagesAsync这个方法:
await Task.Run(() => Parallel.ForEach(paths, path =>
{
using (var img = SafeImRead(path))
{
if (img.Empty()) return;
using (var gray = new Mat())
{
CvtColorTo8U(img, gray);
// 用 FastCheck 模式快速判断这张图里有没有棋盘格
if (Cv2.FindChessboardCorners(gray, boardSize, out _, ChessboardFlags.FastCheck))
{
validImages.Add(new CalibImageObject { FileName = path });
}
}
}
progress?.Report(Interlocked.Increment(ref processed) / (double)total * 100);
}));
这里有几个细节值得说道:
- 并行处理:
Parallel.ForEach让多张图片的加载和验证同时跑,对于批量导入几十张标定图来说速度提升明显。 - FastCheck 模式:
FindChessboardCorners加了ChessboardFlags.FastCheck标志,它的作用是快速扫描图像的局部区域来判断是否存在棋盘格图案——如果连快速检查都过不了,这张图直接跳过,省去了完整的角点检测开销。 - 进度上报:通过
IProgress<double>回报进度,UI 上的 ProgressButton 会实时更新。 - 安全读取:
SafeImRead用File.ReadAllBytes+ImDecode的方式读图,避免文件锁问题——这在实际项目中是个容易踩坑的地方。
第二步:角点检测与亚像素精化
当用户在图像列表中点击某张图时,触发SelectionChanged,调用FindCorners来检测棋盘格角点并在图像上绘制:
if (Cv2.FindChessboardCorners(inputImage, boardSize, out Point2f[] corners))
{
// 亚像素级精化——这是精度提升的关键一步
var improvedCorners = Cv2.CornerSubPix(gray, corners,
SubPixelWindow, // 搜索窗口 3×3
new Size(-1, -1), // 死区
_defaultTermCriteria); // 终止条件:30次迭代或变化<0.005
Cv2.DrawChessboardCorners(displayMat, boardSize, improvedCorners, true);
}
CornerSubPix 这步不能少。FindChessboardCorners 给出的角点位置是像素级的,而 CornerSubPix 在其基础上做二次优化,能把精度提升到亚像素级别(sub-pixel)。它的工作原理是在每个初始角点附近的一个小窗口内,通过计算梯度相关性的质心来精确定位角点。搜索窗口设为 3×3 是个经验值——太小了可能收敛不到最优解,太大了则可能被邻近角点干扰。
另外注意这里用了 CancellationTokenSource 来处理用户快速切换图片时的竞态问题——上一张图的检测还没完就切到了下一张,那就取消掉旧的,避免资源浪费和结果显示错乱。
第三步:执行标定——核心算法
点击「执行标定」后,ExecuteCalibAsync被触发,最终进入CalibrateAsync。这是整个工具最核心的方法,我把它拆成了几个阶段:
阶段一:收集角点
Parallel.For(0, images.Count, i =>
{
// 对每张图重新做角点检测(确保一致性)
if (Cv2.FindChessboardCorners(gray, parameters.BoardSize, out Point2f[] corners))
{
var refined = Cv2.CornerSubPix(gray, corners, ...);
imagePoints.Add(refined);
objectPoints.Add(objectPoint); // 所有用同一个物理坐标点集
}
});
这里的 objectPoints 是根据棋盘格的物理尺寸生成的三维坐标点阵——比如格子边长 4mm 的 11×8 棋盘格,就会生成 88 个 (x*4, y*4, 0) 形式的点。boardThickness 参数则为 z 坐标提供了偏移量,这在双目标定中有用。
阶段二:调用 OpenCV 标定
double calibError = Cv2.CalibrateCamera(
objectPoints, imagePoints, imageSize,
cameraMatrix, distCoeffs,
out rvecs, out tvecs,
flags, termCrit);
这一行就是 OpenCV 标定的本质——基于张正友标定法,通过最小化重投影误差来求解相机的内参矩阵(3×3)和畸变系数向量(最长 14 维)。flags 参数控制哪些参数固定、哪些参与优化,界面上那些 checkbox(FixPrincipalPoint、FixAspectRatio、RationalModel 等)最终就是拼成一个 CalibrationFlags 位域传进去的。
关于标志位的联动逻辑,CreateDefaultFlagMap里有个挺有意思的设计:当「使用初参数」(UseIntrinsicGuess) 未勾选时,依赖它的那些 flag(FixFocalLength、FixK1~K6)会自动禁用并取消勾选——因为你不给初值却要固定某个参数,这在数学上是没有意义的。
阶段三:误差分析与质量评分
标定完成后,光有一个 **RMSE(重投影均方根误差)**是不够的。这个工具做了一个相当详细的多维度误差分析体系,我觉得这部分是整个项目最有价值的部分之一。
首先是CalculateDetailedError—— 它遍历每一张图的每一个角点,用 ProjectPoints 把三维世界点投影回二维图像平面,然后和检测到的实际角点位置做对比,逐点计算欧氏距离误差:
for (int j = 0; j < objectPoints[i].Length; j++)
{
double errorX = projectedPoints[j].X - imagePoints[i][j].X;
double errorY = projectedPoints[j].Y - imagePoints[i][j].Y;
double error = Math.Sqrt(errorX * errorX + errorY * errorY);
pointErrors.Add(new PointErrorInfo { X = ..., Y = ..., Error = error, ... });
}
这就得到了每个角点的独立误差,而不只是一个全局平均值。这些数据后来会被用来画散点图。
然后是质量评分系统 ComputeCalibrationQuality,采用了加权打分机制:
| 维度 | 权重 | 说明 |
|---|---|---|
| RMSE | 40% | 重投影误差,最核心指标 |
| 最大误差 | 20% | 最差角点的误差上限 |
| 图像覆盖 | 20% | 标定图片数量 + 角点是否覆盖图像边缘 |
| 畸变合理性 | 10% | 各畸变系数是否在合理范围内 |
| 内参合理性 | 10% | 焦距、主点位置是否符合物理约束 |
每个维度都有独立的评分函数。以 RMSE 为例:
private static double CalculateRmseScore(double rmse)
{
if (rmse < 0.2) return 1.0; // < 0.2px → 满分
if (rmse < 0.5) return 0.9;
if (rmse < 0.8) return 0.8;
// ...
return 0.2; // > 2.0px → 低分
}
最终的总分换算成等级:≥90 分为「优秀(A+)」,80~89 为「良好(A)」,以此类推。这套评分体系虽然不是什么学术创新,但在实际工程中给用户一个直观的质量反馈,比扔一个冷冰冰的 RMSE 数值要有用得多。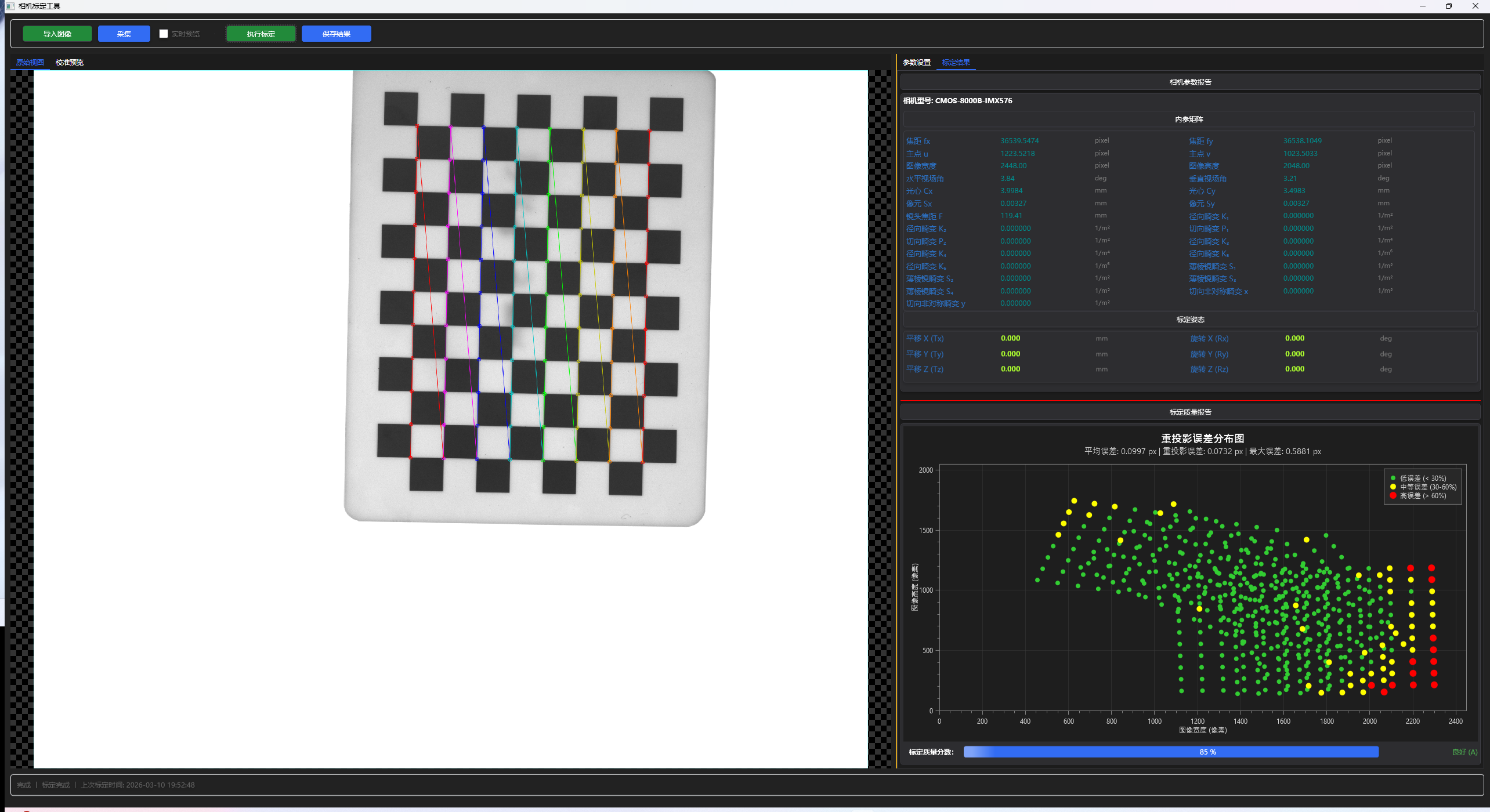
图2:标定结果页——上方展示内参矩阵和位姿参数,下方是用 OxyPlot 绘制的重投影误差散点图,不同颜色代表不同的误差等级
那个散点图 GenerateErrorDistributionImage 是用 OxyPlot 的 ScatterSeries 实现的,按误差大小分成三个等级用绿/黄/红三色渲染。从图上你能一目了然地看到:哪些区域的角点误差大(通常是图像边缘),整体误差分布是否均匀。如果红色点多集中在某个角落,那多半说明那几张标定图的拍摄角度有问题,需要补拍。
第四步:畸变矫正预览
标定拿到内参矩阵和畸变系数后,就可以做去畸变了。UndistortImage的实现:
double[,] newCamMatrix = Cv2.GetOptimalNewCameraMatrix(
cameraMatrix, distCoeffs, source.Size(), alpha, source.Size(),
out Rect validROI, true);
Cv2.InitUndistortRectifyMap(cameraMatrix, distCoeffs,
Mat.Eye(3,3,CV_32F), newCamMatrix, source.Size(),
CV_32FC1, map1, map2);
Cv2.Remap(source, undistorted, map1, map2, InterpolationFlags.Linear);
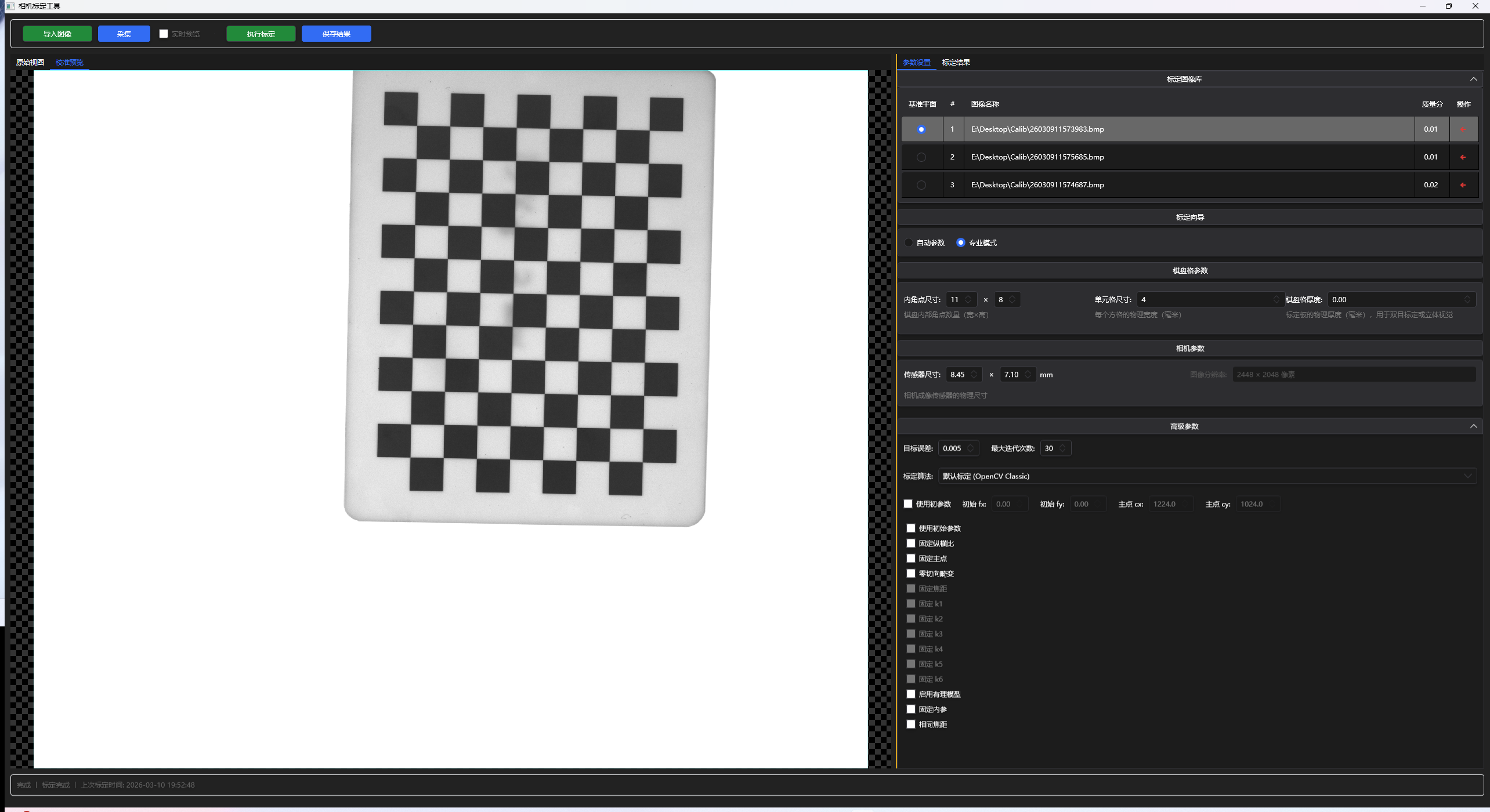
标准的 OpenCV 三步走:先算最优新相机矩阵(alpha=1 保留所有像素),再生成重映射表,最后执行重映射。界面上的「校准预览」Tab 页就是展示这个去畸变后的效果——棋盘格的直线在原图中可能是弯曲的,去畸变后就变直了,视觉效果非常直观。
几个值得一提的实现细节
自定义图像查看器 CanvasViewer
CanvasViewer这个自定义控件是我比较满意的部分。标定工具需要频繁地放大查看角点检测效果,所以一个支持以下交互的图像查看器是刚需:
- Ctrl + 滚轮:以鼠标位置为中心缩放(1x ~ 15x)
- 中键拖拽:平移画布
- 双击:重置为适应窗口大小
- 自适应:窗口大小改变时自动调整缩放比例
实现上用的是 ScaleTransform + ScrollViewer 的组合方案。缩放时的视口中心保持逻辑尤其值得注意——AdjustScrollOffsetAfterZoom方法通过计算鼠标位置在缩放前后的内容坐标系偏移量来调整 ScrollOffset,这样缩放时鼠标指向的点会保持在同一位置,体验上就跟 Google 地图那种缩放感觉一致。
设置持久化策略
SerializeService<T>用泛型 + 静态内部类实现了 XmlSerializer的单例缓存——因为 XmlSerializer 在首次使用时会动态生成程序集,对同一个类型重复创建是很浪费的。另外它在序列化时清空了默认的命名空间声明(namespaces.Add("", "")),让输出的 XML 更干净。
窗口关闭时自动保存 OnClosing,启动时尝试加载LoadViewModel——包括你上次设置的棋盘格参数、选择的标定 flags、甚至每张图的质量分都会被保留下来。这种「下次打开接着干」的体验在工具类软件中真的很重要。
CalibrationResult 的序列化技巧
CalibrationResult里有个巧妙的设计:CameraMatrix 是 double[,] 二维数组,XmlSerializer 不能直接序列化多维数组,所以搞了一个 CameraMatrixSerialized 属性做一维数组的中间转换:
// 序列化时:二维 → 一维
public double[] CameraMatrixSerialized
{
get { /* 把 3×3 展平成 length=9 */ }
set { /* 把 length=9 还原成 3×3 */ }
}
同理,Dictionary<string, double> 类型的 Details 也通过 List<DetailItem> 中转。这种 Pattern 在 C# 的 XML 序列化场景下很常见,虽然啰嗦一点,但胜在可靠。
一些反思和可以改进的方向
写完这个工具回过头来看,有几个地方如果再做一版的话我会考虑调整:
性能方面:当前标定过程中角点检测做了两遍——第一遍在加载时做 FastCheck 筛选,第二遍在标定时重新完整检测。其实可以在加载时就保留检测结果,标定时直接复用,能省掉不少重复计算。当然这也意味着需要在 CalibImageObject 里缓存角点数据,增加内存开销——这是个经典的时间-空间权衡。
功能方面:目前只支持棋盘格CheckerBoard一种标定板,OpenCV 其实还支持圆形网格Circular Grid和不对称圆环Charuco Board。特别是 Charuco Board,它在部分遮挡场景下的鲁棒性比棋盘格好很多,扩展起来并不复杂——主要就是替换 FindChessboardCorners 为 DetectCharucoCorner。
架构方面:CalibrateToolViewModel 承担了太多职责——图像管理、参数配置、标定调度、结果展示、图表生成……如果后续功能继续膨胀,可以考虑拆成多个更小的 ViewModel(比如 ImageListViewModel、ResultViewModel),通过一个主 VM 来协调。不过对于当前这个规模来说,单 VM 的方案维护成本更低,也算是个合理的取舍。
写在最后
相机标定这件事,原理上就是解一个非线性优化问题——给定 n 张图中检测到的二维角点坐标,以及它们对应的三维物理坐标,反求相机的内参矩阵和畸变系数。OpenCV 把这个优化器封装好了,但围绕它构建一个好用的工具,需要考虑的东西远不止调用一个 API 那么简单:如何让用户高效地采集和筛选标定图?如何验证标定结果的可靠性?如何把枯燥的数值变成可视化的洞察?
这个项目大概 2000 行代码左右,不算大,但我希望通过对它的拆解,能让你看到一个小而完整的桌面视觉工具是怎么一步步搭起来的。如果你也在做机器视觉相关的工作,欢迎交流探讨。
完整源码已整理归档,技术栈:.NET Framework 4.8 / WPF / OpenCvSharp4 / HandyControl 3.5.1 / OxyPlot 2.2.0

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 16
16 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)