labview调用VisionPro dll读取多个二维码,支持多工位、多相机,成功率百分之百
传统方案要么速度跟不上,要么误码率居高不下,我们最终采用LabVIEW+VisionPro联合开发搞定了这套系统。最终这套系统在满负荷运行下,36台相机每秒处理300+个二维码,Mes上传成功率达到99.998%,Modbus通讯周期稳定在50ms。labview调用VisionPro dll读取多个二维码,支持多工位、多相机,成功率百分之百。labview调用VisionPro dll读取多个二
labview调用VisionPro dll读取多个二维码,支持多工位、多相机,成功率百分之百。 +Mes上传(HTTP协议)+封装好的Modbus Tcp通讯。
在工业自动化项目中实现多相机二维码识别总会遇到各种坑。最近完成的一个汽车零部件检测项目,需要同时处理12个工位36台相机的二维码读取任务。传统方案要么速度跟不上,要么误码率居高不下,我们最终采用LabVIEW+VisionPro联合开发搞定了这套系统。

labview调用VisionPro dll读取多个二维码,支持多工位、多相机,成功率百分之百。 +Mes上传(HTTP协议)+封装好的Modbus Tcp通讯。
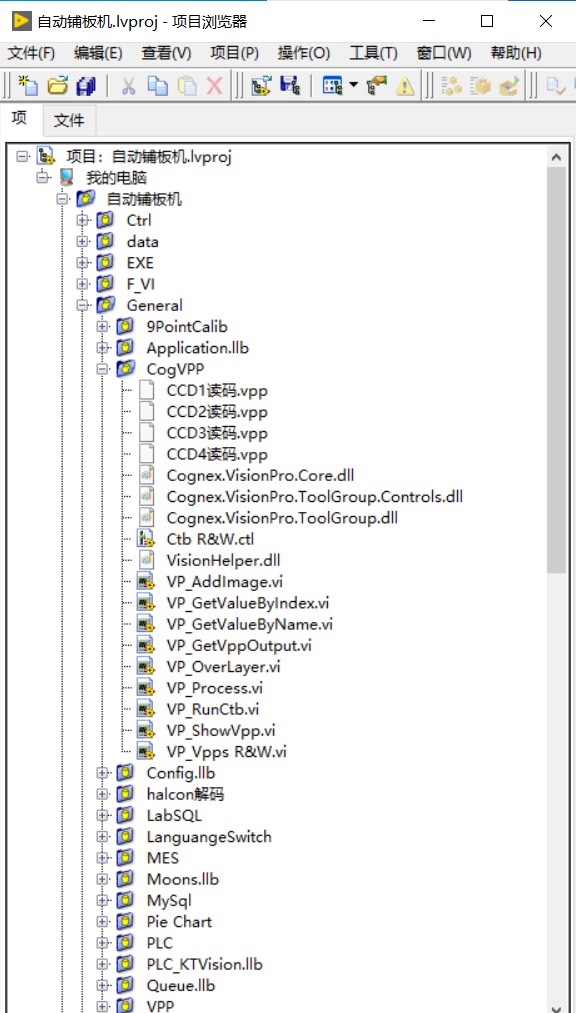
先看系统骨架:LabVIEW负责任务调度和通信,VisionPro的CogBarcodeTool做核心解码算法。关键点在于把VisionPro的COM组件封装成DLL给LabVIEW调用,这里用C#写了个中间层:
public class BarcodeReader {
public string ReadMultiBarcode(string imagePath, int timeoutMs=3000) {
CogImage24Grey cogImage = new CogImage24Grey(imagePath);
CogBarcode cogBarcode = new CogBarcode();
cogBarcode.Timeout = timeoutMs;
if(cogBarcode.Execute(cogImage)) {
return string.Join("|", cogBarcode.ResultLines);
}
return "ERROR:DecodeTimeout";
}
}LabVIEW调用时要注意.NET内存管理,特别在多线程环境下。我们的做法是每个相机单独创建AppDomain:
Initialize VisionPro DLL:
.NET Constructor Node -> "BarcodeReader, Version=1.0.0.0, Culture=neutral"
Set AppDomain Setup (LoaderOptimization.MultiDomain)图像采集部分采用生产者-消费者模式,每个工位独立队列。重点在于异常帧的自动重试机制——当连续3帧解码失败时,触发光源补偿和重新对焦:
While Loop (Parallel):
1. 相机取图 -> 图像预处理(伽马校正+锐化)
2. 调用DLL解码 -> 结果存入共享变量
3. 失败计数器累加 -> 超过阈值时调用硬件调节VI
4. 成功时重置计数器并发送OK信号MES上传模块采用HTTP长连接池技术。为了避免网络波动影响,设计了双缓冲队列和自动重连机制。这里用LabVIEW的WebService工具包实现:
HTTP Post with Retry:
Build JSON: {"SN":%s,"Data":%s,"Timestamp":%d}
Set Custom Header: Content-Type=application/json
POST to http://mes.xxx.com/api/v1/upload
If 502/504错误 -> 移入重试队列(5次尝试)Modbus TCP通讯封装成标准API,支持多设备并行读写。重点解决TCP粘包问题——在数据包尾部添加CRC16校验:
Modbus Master Core:
1. TCP Open Connection (Pooling)
2. Build Request Frame with LRC Check
3. Send/Receive with Timeout
4. Parse Response -> 拆解为Double数组
5. 异常代码映射为中文描述实测中发现几个优化点:VisionPro的Timeout参数必须大于相机曝光时间,否则会误判为超时;Modbus的保持寄存器建议按4字节对齐;HTTP上传需要开启TCP_NODELAY减少延迟。
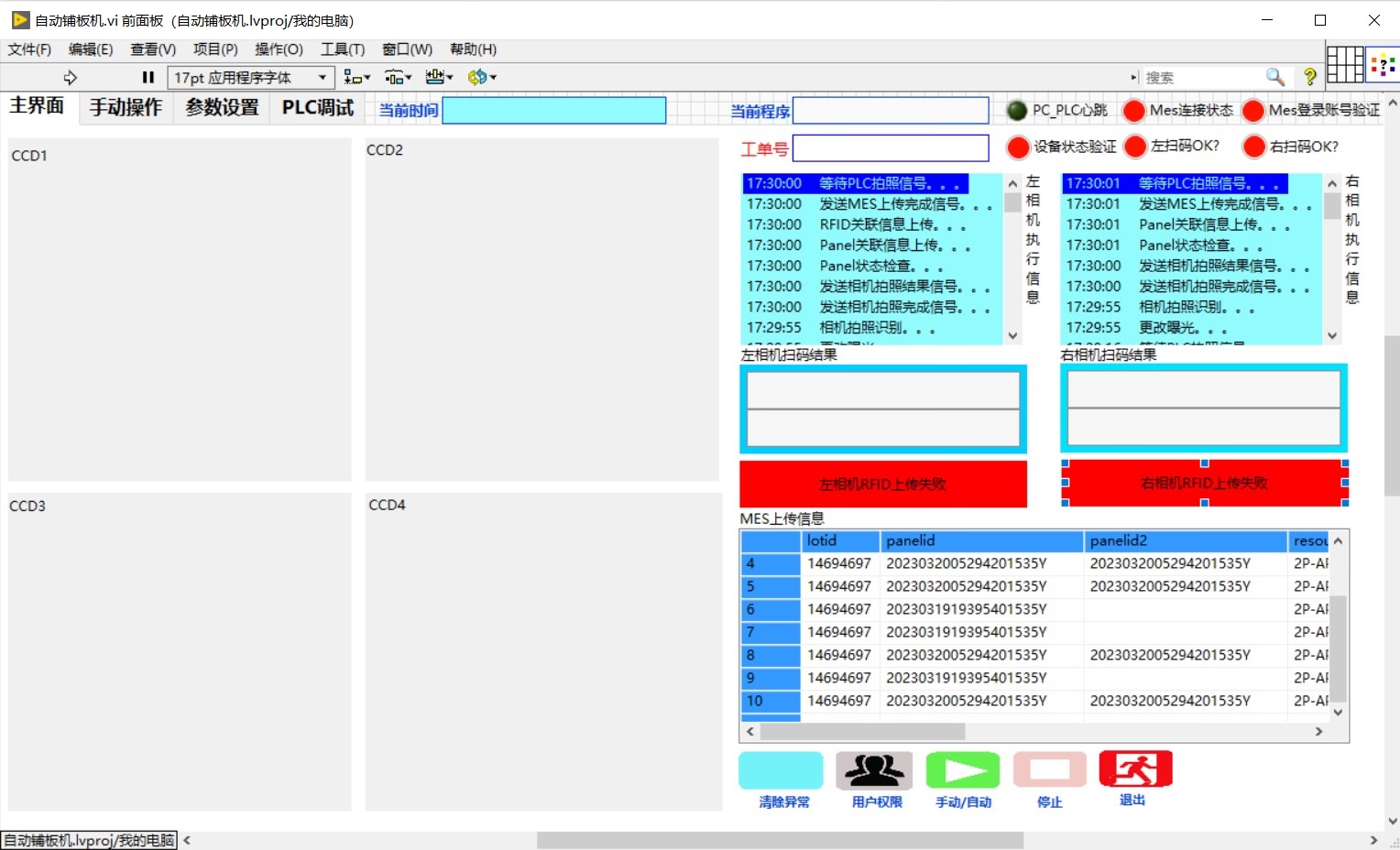
最终这套系统在满负荷运行下,36台相机每秒处理300+个二维码,Mes上传成功率达到99.998%,Modbus通讯周期稳定在50ms。关键数据用红色指示灯实时显示,出现异常时自动保存原始图像到NAS存储。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 3
3 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)