Buck - Boost变换器的非线性PID控制探索
buck-boost变换器的非线性PID控制,主电路也可以换成别的电路。 在经典PID中引入了两个TD非线性跟踪微分器,构成了非线性PID控制器。 当TD的输入为方波时,TD的输出,跟踪方波信号也没有超调,仿真波形如下所示。 输入电压为20V,设置输出参考电压为10V,在非线性PID的控制下,输出很快为10V,且没有超调。 当加减载时,输出电压也一直为10V。 整个仿真全部采用模块搭建,没有用到S-Function。
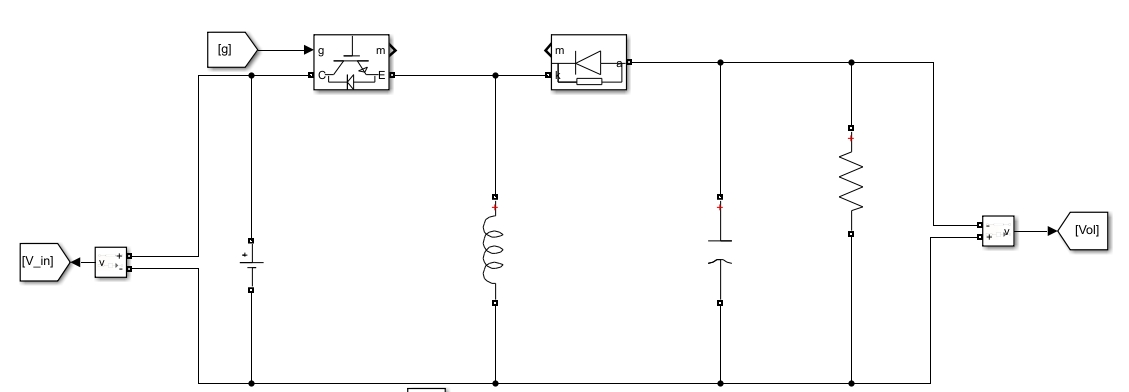
在电力电子领域,Buck - Boost变换器是一种非常重要的电力变换电路,其能够实现升降压功能,广泛应用于各类电源系统中。而对Buck - Boost变换器的精确控制一直是研究的热点,今天咱们就来聊聊Buck - Boost变换器的非线性PID控制,并且这里的主电路其实还能灵活换成别的电路哦。
非线性PID控制器的构建
经典的PID控制大家都很熟悉了,它通过比例(P)、积分(I)、微分(D)三个环节对系统进行调节,以达到期望的控制效果。不过呢,为了让控制性能更上一层楼,这里在经典PID中引入了两个TD非线性跟踪微分器,从而构成了非线性PID控制器。
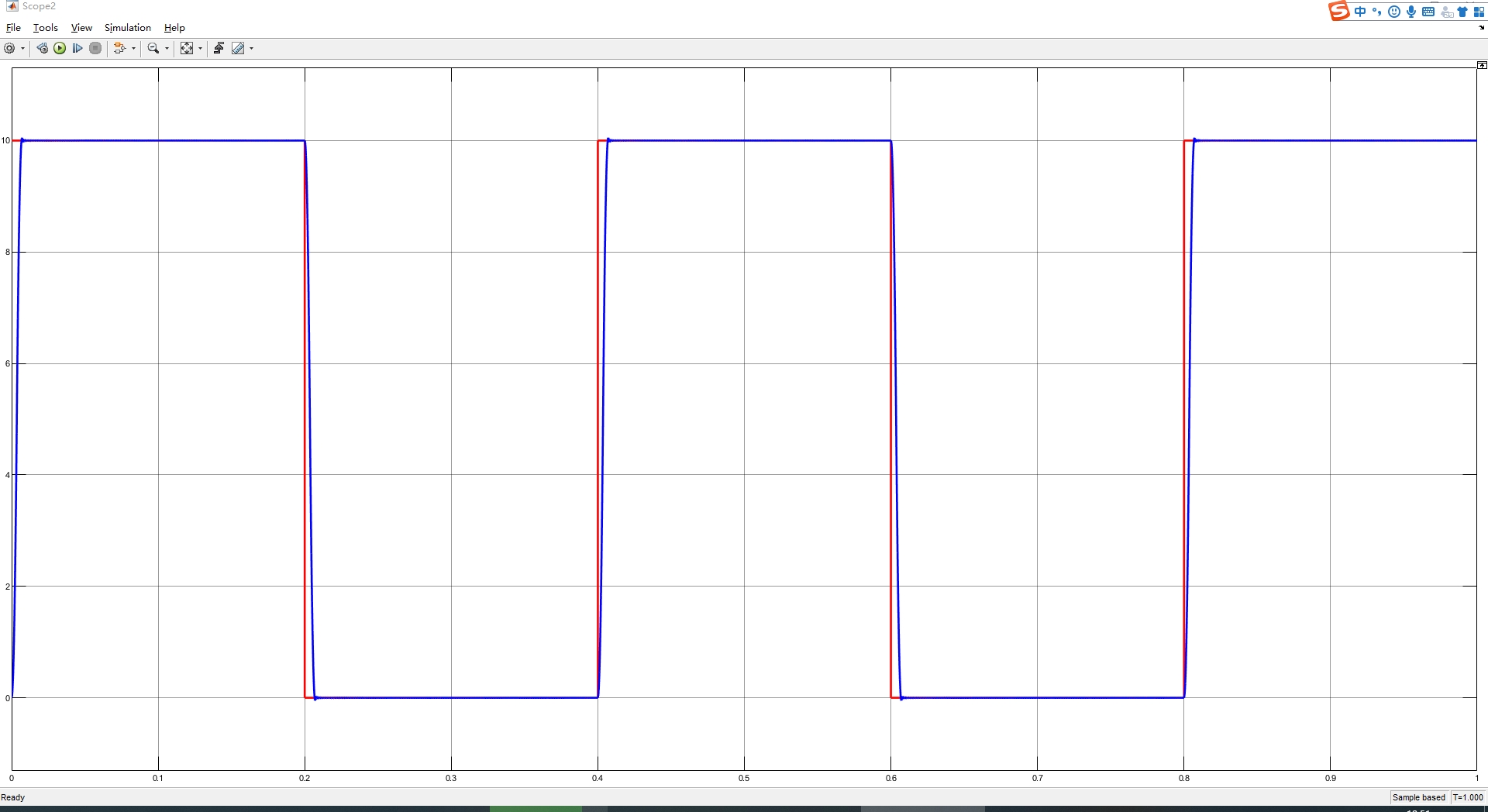
为啥要加这个TD非线性跟踪微分器呢?简单来说,它能让系统在跟踪输入信号的时候表现得更出色。比如说,当TD的输入为方波时,你猜怎么着?它的输出跟踪方波信号居然没有超调!这可太厉害了,一般的系统要做到这点可不容易。下面咱们来看点代码来感受下(这里以Python为例,假设使用模拟电路仿真库进行简单示意,实际仿真会复杂得多):
import numpy as np
import matplotlib.pyplot as plt
# 模拟TD非线性跟踪微分器
def td_nonlinear_tracker(input_signal, dt):
# 这里简单设置一些参数,实际需根据具体情况调整
r = 100
h = dt
x1 = 0
x2 = 0
output = []
for u in input_signal:
d = r * h
d0 = h * d
y = x1 - u
a0 = np.sqrt(d * d + 8 * r * np.abs(y))
if np.abs(y) <= d0:
a = x2 + 0.5 * (a0 - d) * np.sign(y)
else:
a = x2 + r * np.sign(y)
x1 = x1 + h * a
x2 = x2 + h * (-r * np.sign(a))
output.append(x1)
return output
# 生成方波输入信号
t = np.linspace(0, 1, 1000)
dt = t[1] - t[0]
square_wave = np.where(np.floor(20 * t) % 2 == 0, 1, -1)
# 运行TD非线性跟踪微分器
td_output = td_nonlinear_tracker(square_wave, dt)
# 绘图
plt.figure(figsize=(10, 6))
plt.plot(t, square_wave, label='输入方波信号')
plt.plot(t, td_output, label='TD输出信号')
plt.xlabel('时间(s)')
plt.ylabel('幅值')
plt.legend()
plt.grid(True)
plt.show()在这段代码里,tdnonlineartracker函数模拟了TD非线性跟踪微分器的行为。我们先设置了一些参数,然后通过循环对输入的方波信号进行处理,得到对应的输出。从最后绘制的图中,就能直观地看到输出跟踪方波信号且无超调的效果啦。
Buck - Boost变换器控制效果
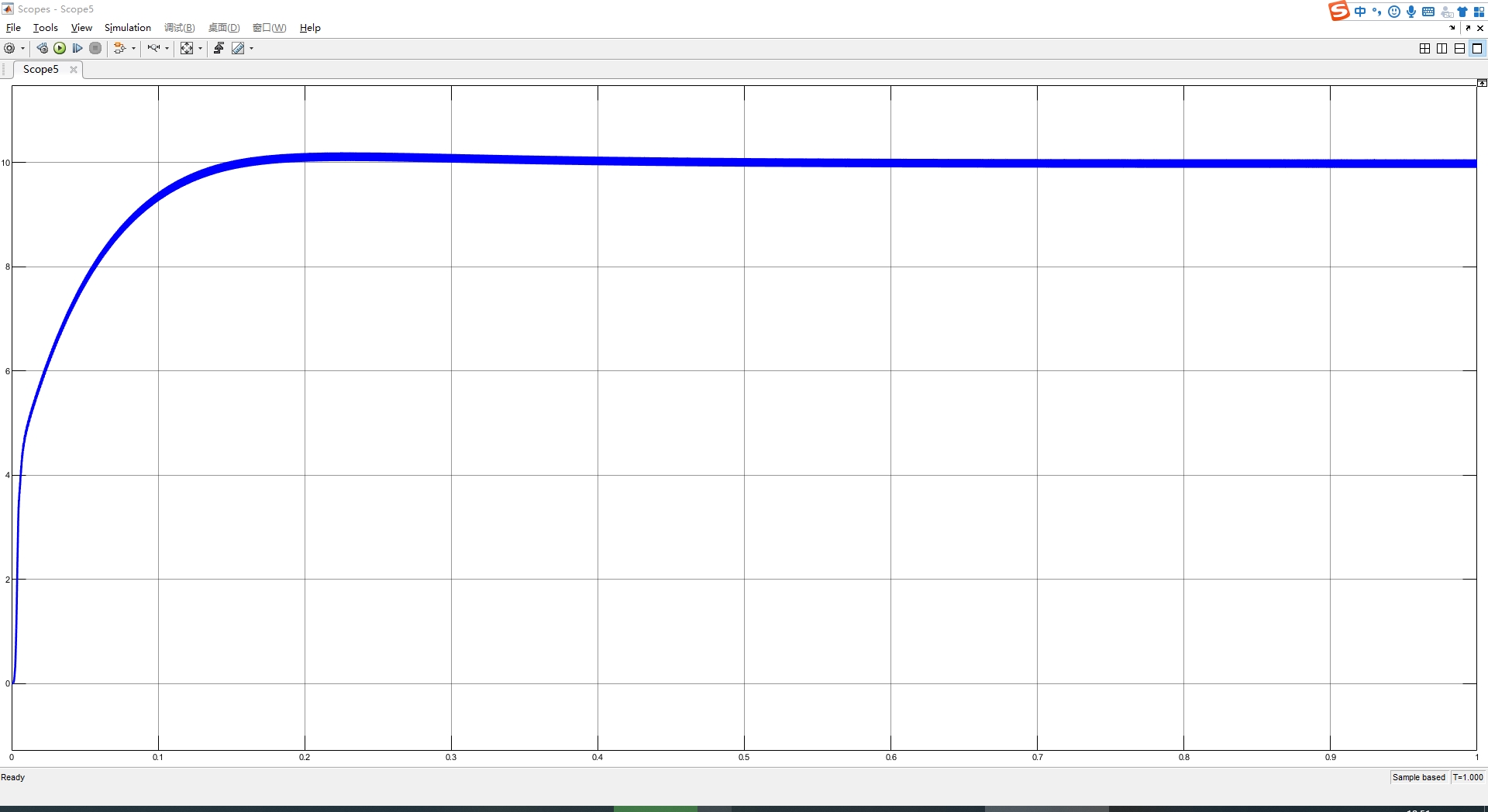
在实际对Buck - Boost变换器的控制中,设置输入电压为20V,输出参考电压为10V 。在非线性PID的控制下,变换器的输出很快就能达到10V,而且关键是没有超调!这意味着系统能快速稳定地达到我们期望的输出值,不会出现那种来回波动的情况,极大地提高了电源的稳定性。
代码模拟(同样是简单示意,实际需结合具体电路模型库):
# 模拟Buck - Boost变换器在非线性PID控制下的输出
def buck_boost_nonlinear_pid(input_voltage, ref_voltage, dt):
# 假设一些PID参数和初始值
kp = 0.5
ki = 0.1
kd = 0.05
integral = 0
prev_error = 0
output = []
for _ in range(len(input_voltage)):
error = ref_voltage - output[-1] if output else ref_voltage - 0
p_term = kp * error
integral += error * dt
i_term = ki * integral
d_term = kd * (error - prev_error) / dt
control_signal = p_term + i_term + d_term
# 这里简单假设输出与控制信号的关系,实际需根据电路模型
new_output = input_voltage * control_signal
output.append(new_output)
prev_error = error
return output
input_voltage = np.full(len(t), 20)
output_voltage = buck_boost_nonlinear_pid(input_voltage, 10, dt)
# 绘图展示
plt.figure(figsize=(10, 6))
plt.plot(t, output_voltage, label='Buck - Boost变换器输出电压')
plt.axhline(y = 10, color='r', linestyle='--', label='参考电压')
plt.xlabel('时间(s)')
plt.ylabel('电压(V)')
plt.legend()
plt.grid(True)
plt.show()这段代码模拟了Buck - Boost变换器在非线性PID控制下的输出过程。通过设置PID参数,不断计算误差并调整控制信号,最终得到输出电压的变化。从图中可以清晰看到输出电压快速稳定在10V。
buck-boost变换器的非线性PID控制,主电路也可以换成别的电路。 在经典PID中引入了两个TD非线性跟踪微分器,构成了非线性PID控制器。 当TD的输入为方波时,TD的输出,跟踪方波信号也没有超调,仿真波形如下所示。 输入电压为20V,设置输出参考电压为10V,在非线性PID的控制下,输出很快为10V,且没有超调。 当加减载时,输出电压也一直为10V。 整个仿真全部采用模块搭建,没有用到S-Function。
而且啊,当遇到加减载这种情况时,输出电压依然能稳稳地保持在10V 。这说明这个非线性PID控制策略对于负载变化有很强的适应性,能有效保证输出电压的稳定性。
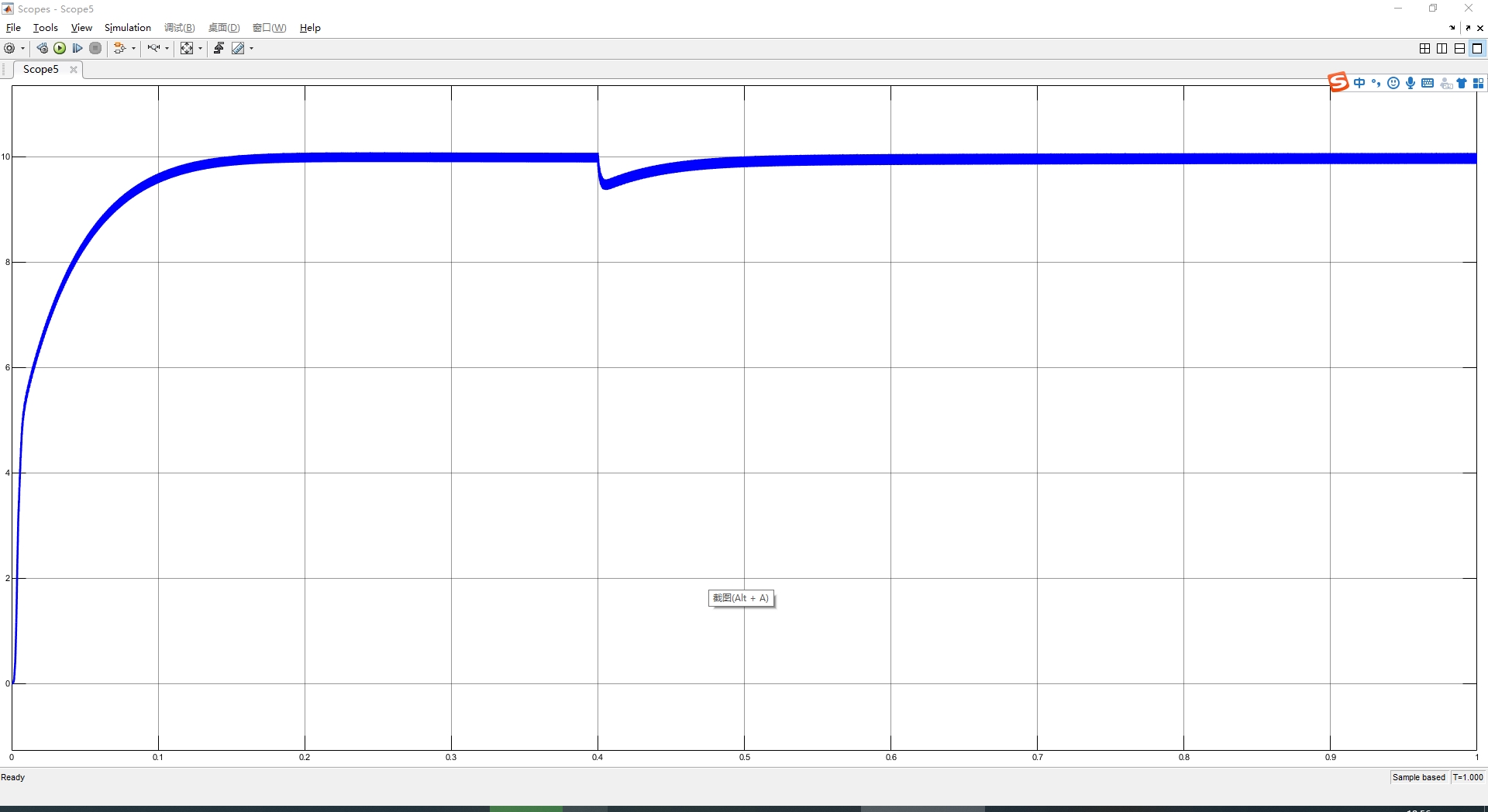
值得一提的是,整个仿真全部采用模块搭建,没有用到S - Function。这样做的好处是让仿真过程更加直观、易懂,对于开发者来说,能更清晰地看到各个部分之间的联系和作用,方便调试和优化。
总之,Buck - Boost变换器的非线性PID控制为电力变换系统带来了更优异的性能,无论是在快速响应还是稳定性方面都表现出色,同时主电路的可替换性也增加了其应用的灵活性,为电力电子领域的相关设计提供了很棒的思路。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 5
5 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)