探索平行泊车与垂直泊车的Matlab程序仿真之旅
平行泊车、垂直泊车matlab程序仿真,实现泊车路线规划,附带程序资料在自动驾驶领域,泊车是一项关键且复杂的任务。今天咱们就来唠唠如何通过Matlab程序实现平行泊车和垂直泊车的路线规划与仿真,这不仅能帮助理解自动驾驶泊车原理,还能为实际应用打下基础。
平行泊车、垂直泊车matlab程序仿真, 实现泊车路线规划,附带程序资料
在自动驾驶领域,泊车是一项关键且复杂的任务。今天咱们就来唠唠如何通过Matlab程序实现平行泊车和垂直泊车的路线规划与仿真,这不仅能帮助理解自动驾驶泊车原理,还能为实际应用打下基础。
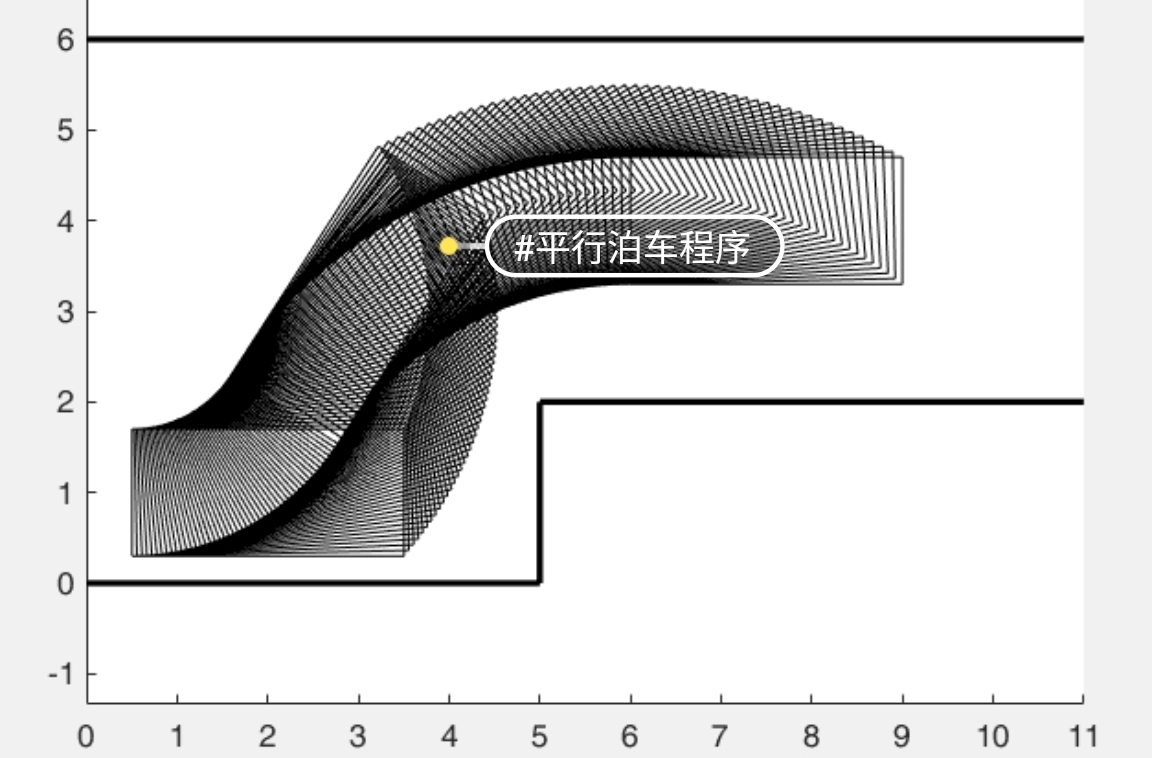
平行泊车仿真
1. 基本原理
平行泊车的核心是规划车辆从初始位置到目标车位的平滑路径。一般会基于车辆的运动学模型,考虑车辆的转向、速度等因素。假设车辆是一个简单的两轮模型(前轮转向,后轮驱动),我们可以通过控制前轮转角来规划路径。
2. Matlab代码实现
% 初始化参数
L = 5; % 车辆轴距
x0 = 0; y0 = 0; theta0 = 0; % 初始位置和方向
xf = 10; yf = 3; % 目标位置
% 离散化时间
dt = 0.1;
t = 0:dt:20;
% 初始化位置数组
x = zeros(size(t));
y = zeros(size(t));
theta = zeros(size(t));
x(1) = x0;
y(1) = y0;
theta(1) = theta0;
% 泊车路径规划
for i = 2:length(t)
% 简单的转向控制策略,这里只是示例
delta = atan2(yf - y(i - 1), xf - x(i - 1));
v = 1; % 速度设定为常量
x(i) = x(i - 1) + v * cos(theta(i - 1)) * dt;
y(i) = y(i - 1) + v * sin(theta(i - 1)) * dt;
theta(i) = theta(i - 1) + v / L * sin(delta) * dt;
end
% 绘图
figure;
plot(x, y, '-o');
xlabel('X 坐标');
ylabel('Y 坐标');
title('平行泊车路径仿真');3. 代码分析
- 初始化部分:我们设定了车辆的轴距
L,这对于计算转向角度和车辆运动轨迹很关键。同时定义了车辆的初始位置(x0, y0, theta0)和目标位置(xf, yf)。时间离散化步长dt设定为0.1,意味着每0.1秒更新一次车辆的位置。 - 循环部分:在每一步中,根据目标位置和当前位置的关系计算前轮转向角
delta。这里用的是简单的反正切函数计算方向角,实际应用中会更复杂。速度v设为常量1,然后根据车辆运动学公式更新车辆的位置x、y和方向theta。 - 绘图部分:利用Matlab的绘图函数,将计算得到的路径绘制出来,这样就能直观看到平行泊车的路径。
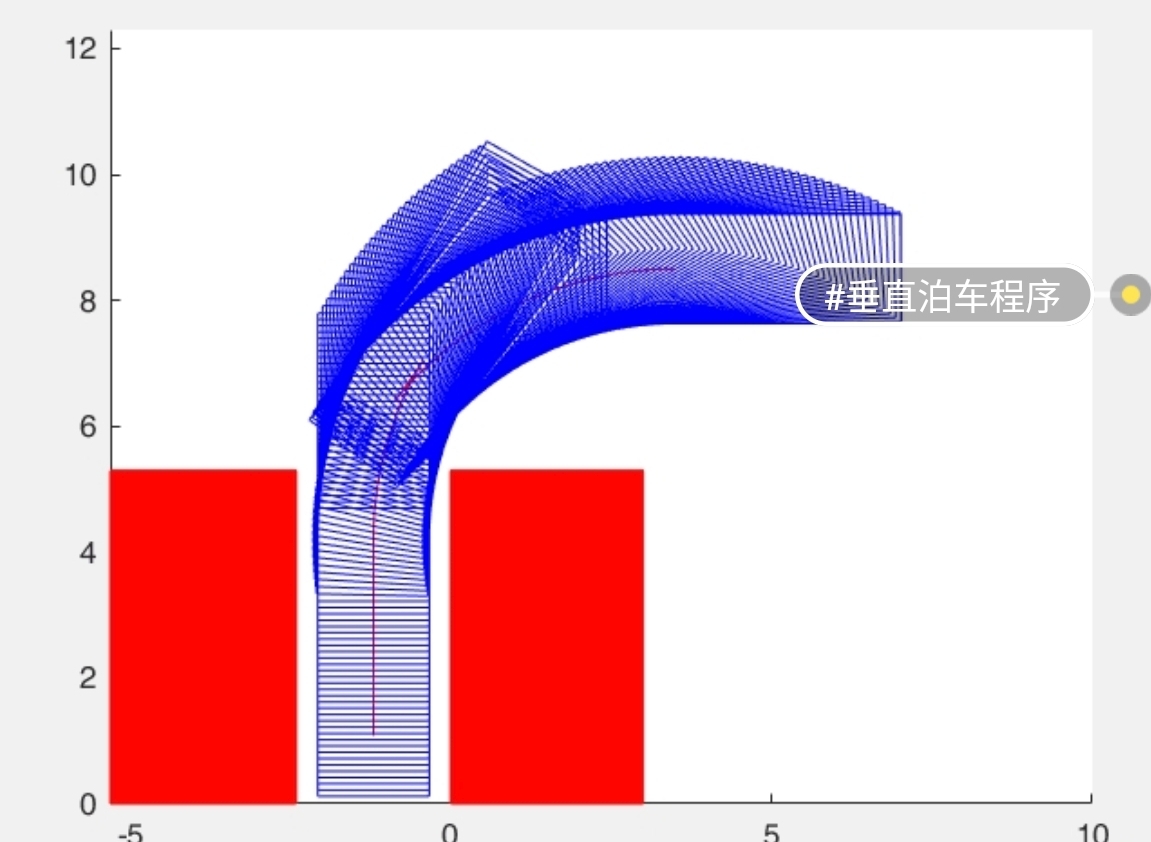
垂直泊车仿真
1. 基本原理
垂直泊车与平行泊车不同,车辆需要先垂直于车位方向行驶,然后再转向进入车位。这同样依赖车辆运动学模型,但规划路径的逻辑会有变化。
2. Matlab代码实现
% 初始化参数
L = 5; % 车辆轴距
x0 = 0; y0 = 0; theta0 = 0; % 初始位置和方向
xf = 8; yf = 6; % 目标位置
% 离散化时间
dt = 0.1;
t = 0:dt:20;
% 初始化位置数组
x = zeros(size(t));
y = zeros(size(t));
theta = zeros(size(t));
x(1) = x0;
y(1) = y0;
theta(1) = theta0;
% 垂直泊车路径规划
approach = true; % 接近阶段标志
for i = 2:length(t)
if approach
% 接近车位阶段,先沿Y轴行驶
v = 1;
x(i) = x(i - 1);
y(i) = y(i - 1) + v * dt;
if y(i) >= yf - 2
approach = false;
end
else
% 转向进入车位阶段
delta = pi/2; % 固定转向角
v = 0.5;
x(i) = x(i - 1) + v * cos(theta(i - 1)) * dt;
y(i) = y(i - 1) + v * sin(theta(i - 1)) * dt;
theta(i) = theta(i - 1) + v / L * sin(delta) * dt;
if x(i) >= xf
break;
end
end
end
% 绘图
figure;
plot(x, y, '-o');
xlabel('X 坐标');
ylabel('Y 坐标');
title('垂直泊车路径仿真');3. 代码分析
- 初始化部分:和平行泊车类似,设定轴距、初始位置和目标位置,还有时间步长。
- 循环部分:通过一个标志
approach区分两个阶段。在接近阶段,车辆沿着Y轴方向行驶,直到接近目标车位一定距离(这里是yf - 2)。然后进入转向进入车位阶段,设定一个固定的转向角delta = pi/2,并以较慢速度更新车辆位置和方向,直到车辆到达目标位置的X坐标,就结束循环。 - 绘图部分:同样是绘制路径,直观展示垂直泊车的过程。
通过以上Matlab程序的实现和分析,我们对平行泊车和垂直泊车的路径规划有了更清晰的认识。当然,实际的自动驾驶泊车系统会更复杂,涉及传感器数据处理、精确的环境感知等,但这些基础的程序仿真为进一步研究提供了很好的起点。希望大家可以在此基础上,继续探索自动驾驶领域有趣的内容。
程序资料说明
上述代码只是简单的示例,实际应用中可拓展的地方很多。比如,考虑车辆的实际尺寸、加入更复杂的环境感知模块、优化转向和速度控制算法等。程序资料还可以包括更多的注释说明,方便理解每一步的功能。此外,可以将这些代码封装成函数,便于在不同的场景中调用,提高代码的复用性。如果要进行更深入的研究,还可以结合Simulink进行联合仿真,模拟更真实的车辆动力学和环境因素。总之,这里的程序只是一个抛砖引玉的开始,期待大家挖掘出更多的可能性。
平行泊车、垂直泊车matlab程序仿真, 实现泊车路线规划,附带程序资料

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 11
11 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)