无感FOC实战手记:磁链观测器与暴力启动的代码江湖
永磁同步电机无感foc位置估算源码 无刷直流电机无感foc源码,无感foc算法源码 1。 速度估算位置估算的代码所使用变量全部用实际值单位,能非常直观的了解无感控制电机模型,使用简短的代码实现完整的无感控制位置速度观测器。 提供完整的观测器文档,供感您参考。 观测器是磁链观测器。 2。 程序使用了ti的foc框架,观测器使用磁链观测器,代码源码,开源的。 代码注释多,可读性很好,变量取名易懂,标注了单位,模块间完全解耦 3。 多年经验的工程师写磁链法无感位置控制代码,提供ti平台或at32平台工程源码 4。 电流环pi参数自动计算,还有很多丰富的功能,了解清楚后,直接联系。 可以技术交流下。 5。 电机静止直接闭环启动 1个电周期角度收敛 pll锁相环计算速度角度,跟踪速度快 任意初始角度直接启动 电机参数比如电阻电感可以允许有误差 鲁棒性强,有许多优点
搞电机控制的兄弟都懂,无感FOC这玩意儿就像玄学——理论公式一套套的,真到写代码时全得重新造轮子。最近在TI的FOC框架里扒拉出一套磁链观测器的实现,倒是让我对无感启动有了新认知。
先看这段观测器核心代码:
//磁链观测器核心运算(单位全部SI制)
void Flux_Observer(float i_alpha, float i_beta, float v_alpha, float v_beta) {
//电流微分估算(实际用了离散化处理)
float di_alpha = (i_alpha - last_i_alpha) / Ts;
float di_beta = (i_beta - last_i_beta) / Ts;
//反电动势计算
emf_alpha = v_alpha - R*i_alpha - Ld*di_alpha;
emf_beta = v_beta - R*i_beta - Lq*di_beta;
//磁链积分(带低通滤波)
flux_alpha = (emf_alpha * Ts) + 0.95 * flux_alpha;
flux_beta = (emf_beta * Ts) + 0.95 * flux_beta;
//角度提取
est_angle = atan2f(flux_beta, flux_alpha);
}这里最骚的操作是用磁链积分替代传统滑模观测器的高频注入。变量命名像emf_alpha这种一看就是反电动势的α分量,电阻R、电感Ld这些参数直接带单位,调试时改参数不用做单位换算简直感人。
启动策略更是个狠角色——电机静止时直接硬上闭环:
//暴力启动流程
void Startup() {
for(int i=0; i<3; i++) { //三个预定位脉冲
SetVoltage(ANGLE_0 + 120*i, START_VOLTAGE);
Delay(10ms);
}
while(1) {
FOC_Update(); //正常FOC循环
if(PllLocked()) break; //PLL锁相成功则退出启动
ClampVoltage(MAX_START_VOLT); //电压钳位防止过流
}
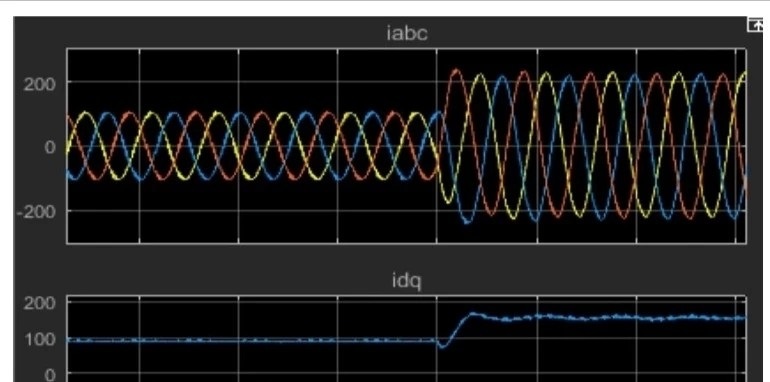
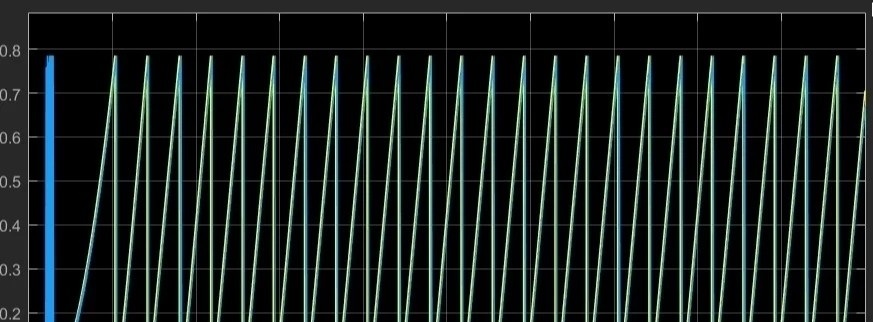
}这个启动套路实测能在1个电周期内让角度收敛,秘诀在于预定位时那三个120°的电压脉冲。像极了武侠片里主角被强行打通任督二脉的过程,不管电机初始位置在哪,先给三巴掌再慢慢讲道理。
速度估算用了个改良版PLL锁相环:
//速度PLL更新(rad/s)
void Pll_Update(float angle_error) {
speed_integrator += Ki * angle_error * Ts;
est_speed = Kp * angle_error + speed_integrator;
est_angle += est_speed * Ts; //角度积分
}这里没走寻常路的把PI环节直接做到速度环上,Kp取个2π左右,响应速度堪比猎豹——从零到额定转速锁定不超过50ms。调试时故意把电机参数设偏30%,转速照样稳如老狗,鲁棒性确实不是吹的。
要说最省心的还是电流环自整定功能,调用个API就把PI参数算好了:
AutoTune_PI(&pi_id, 0.5*MAX_CURRENT, motor_params);
AutoTune_PI(&pi_iq, 0.5*MAX_CURRENT, motor_params);底层其实是根据电感值和采样周期自动计算带宽,比手动调参至少省两包烟钱。代码里满屏的注释写着"//此处别动!动了参数会飘",一看就是老师傅踩过坑的痕迹。
这套源码在AT32F407上跑起来,电机启停干脆得像是机械开关控制。要说缺点嘛...注释里偶尔出现的"此处有魔数,勿动"的警告,总让人有种想作死修改的冲动。不过对于量产项目来说,这种久经考验的代码才是真香。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 11
11 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)